Download as PDF, PPTX


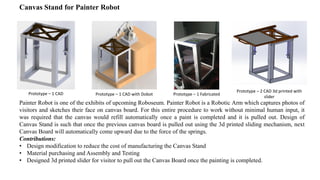





This document is a mechanical engineering portfolio for Nirav Joshi. It summarizes his educational and professional experience in mechanical design and robotics. Over the past 1.5 years, he has worked as a Mechatronics Engineer designing robot components in Solidworks, coordinating vendors, and testing robots. He also has experience developing algorithms for autonomous robots using MATLAB from participating in national robotics competitions. His portfolio provides details on several robot design projects and competitions he has contributed to.



































































