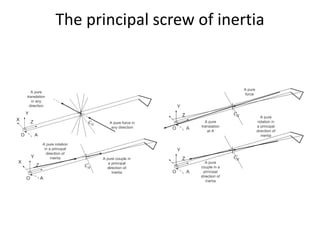
The principal screw of inertia
•Download as PPTX, PDF•
1 like•384 views

If forces and velocities produce zero power then they represent reciprocal screws.

Recommended
Recommended
More Related Content
What's hot
What's hot (18)
Viewers also liked
Viewers also liked (20)
Similar to The principal screw of inertia
Similar to The principal screw of inertia (20)
More from Wangdo Kim
More from Wangdo Kim (10)
Recently uploaded
Recently uploaded (20)
The principal screw of inertia
- 1. The principal screw of inertia
- 2. Coordinate Transformations • The skew symmetric vector cross product operator is Translating a velocity twist Av and a force wrench Af from point A to another point B can be done utilizing position vector ABr between points A and B. The linear velocity is B A ABv v r and the moment is B A ABr f . The term ABr corresponds to the vector cross product which is defined in terms of 3 3 matrix as 0 0 0 x z y y z x z y x
- 3. skew-symmetric • In mathematics, and in particular linear algebra, a skew-symmetric (or antisymmetric or antimetric) matrix is a square matrix whose transpose is its negation; that is, it satisfies the condition −A = AT.
- 4. • Then the spatial form of the translations are • With the 6x6 spatial transformation ( )B B A Av X v ( ) T B B A Af X f 1 0 1 AB B A r X Note that ( )T r r and 1 ( )B A A BX X . Rotations are actually easier to define since both linear and angular parts transform the same way. Using E, an orthogonal 3x3 rotation matrix from coordinate frames B’ to B, any 'B Be Ee . Thus,
- 5. A general twist transformation from A to B • and its inverse A general twist transformation from A to B with translation ABr followed by rotation R is described by the transformation matrix ( ) 0 T AB B A R R r X R 0 T T AB A B T R r R X R
- 6. A general wrench transformation from A to B • and its inverse A general wrench transformation from A to B with translation ABr followed by rotation R is described by the transformation matrix 0 ( ) ( ) T B A T AB R X R r R 0 ( ) T T A B T T AB R X r R R
- 7. Spatial accelerations transform Spatial accelerations transform the same way velocities do. The transformation of an acceleration twist from coordinate frame A to coordinate frame B is defined as ( )B B A Aa X a using the same transformation matrix as ( ) 0 T AB B A R R r X R
- 8. Euler’ Method • Orientation is given by a 33 rotation matrix. It is possible to describe an orientation with fewer than nine numbers Cayley’s formula for orthogonal matrices. )SI()SI(R 3 1 3 O. Bottema, B. Roth, Theoretical Kinematics, North Holland, Amsterdam, 1979 Skew-symmetric matrix (i.e. T SS ) by three parameters 0SS S0S SS0 S XY XZ YZ
- 9. Six constraints on nine elements • Multiplication of matrices is not commutative. • (Finite rotation in 3-D space) be performed in a specific order Nine elements of rotation matrix are not all independent. ZˆYˆXˆR ,0ZˆYˆ,0ZˆXˆ,0YˆXˆ 1Zˆ,1Yˆ,1Xˆ Six constraints on nine elements
- 10. X-Y-Z Fixed Angles: • Start with the frame coincident with a known frame (Global frame). First rotate L about X by an angle , then rotate about Y by an angle , and then rotate about Z by any angle . • Rotations are specified about the fixed (i.e. non-moving) reference frame.
- 11. 333231 232221 131211 XYZXYZ coscoscos coscoscos coscoscos coscossincossin sincoscossinsincoscossinsinsincossin sinsincossincoscossinsinsincoscoscos cossin0 sincos0 001 cos0sin 010 sin0cos 100 0cossin 0sincos RRR),,(R
- 13. Zy’x” Euler Angles: • Start with the frame coincident with a known frame (Global frame). First rotate L about Z by an angle , then rotate about y by an angle , and then rotate about x by an angle . • Each rotation is performed about an axis of the moving system (L), rather than the fixed frame (G). Such a set of three rotations are called “Euler Angles”. Note that each rotation takes place about an axis whose location depend on the preceding rotations.
- 14. • SAME AS that obtained for the same three rotation taken in the reserve order about fixed axes!!! cossin0 sincos0 001 cos0sin 010 sin0cos 100 0cossin 0sincos RRR),,(R "x'yZ"x'Zy
- 15. Two rotations • Example: two rotations, Z by 30 and X by 30: Example: two rotations, Z by 30 and X by 30: 000.1000.0000.0 000.0866.0500.0 000.0500.0866.0 )30(RZ 866.0500.0000.0 500.0866.0000.0 000.0000.0000.1 )30(RX 87.043.025.0 50.075.043.0 00.050.087.0 )30(R)30(R 87.050.000.0 43.075.050.0 25.043.087.0 )30(R)30(R ZXXZ Multiplication of matrices is not commutative. (Finite rotation in 3-D space) be performed in a specific order
- 16. Joint Rotation Convention • To identify the relative attitude of two body segments, three axes should be specified. In the joint rotation convention (JRC), two axes are fixed with the body segments, proximal and distal and one is a floating axis. • The first axis is the first fixed body axis and is perpendicular to the sagittal plane of the proximal segment. • The second axis is the floating axis (the cross product of the first and third axes). • The third, or the second fixed-body axis, is the long axis of the distal segment.
- 17. JRC angles are anatomically meaningfull.
- 18. Definition of Anatomical Coordinate System • The anatomical coordinate system of the shank, considered to be fixed, is defined by the four landmarks on the shank as follows: • Origin is at the midpoint of the line joining MM and LM • Y-axis is orthogonal to the quasi-frontal plane defined by the MM, LM and HF • Z-axis is orthogonal to the quasi-sagittal plane defined by the Y-axis and TT • X-axis is the cross product of the Y- and Z-axis • The positive directions of the coordinate axes are defined as for both the right foot and the left foot plantarflexion about the z-axis, inversion about the y-axis, and adduction about the x-axis are positive. Figure 3-6 shows the shank anatomical coordinate system of both the left foot and the right foot pictorially. • At the reference position, the local coordinate system of the foot is assumed to be coincident initially with that of the shank. So the coordinate system of the foot is not landmark based coordinate system.
- 19. Anatomical coordinate system of the shank HF TT TT HF LM MM MM LMY YZ Z X X Right Left
- 20. Momentum Wrench • A moving rigid body has a linear and an angular momentum associated with it. The spatial momentum is defined as 0p P r p h Which represents the linear momentum p acting on a line through the center of mass, and the intrinsic angular momentum h about the center of mass. The intrinsic angular momentum is h I
- 21. • Assembling the linear and angular parts together the spatial momentum is defined as where I is the angular inertia about the center of mass and is its angular velocity vector. The linear momentum is proportional to the linear velocity vector of the center of mass and thus ( )p m v r where v is the linear velocity vector of the reference point and r is the relative position vector of the center of mass from the reference point. ( ) ( ) m v r P I r m v r The r p term represents the moment of momentum about the reference point.
- 22. Momentum wrenches transform • Momentum wrenches transform the same way force wrenches transform. The momentum transformation from coordinate frame A to coordinate frame B is defined as ( ) T B B A AP X P using the transformation matrix ( ) T B AX from 0 ( ) ( ) T B A T AB R X R r R
- 23. Spatial Inertia • The spatial inertia is defined as the tensor that multiplies a velocity twist to produce a momentum wrench. Therefore, by factoring out the velocity terms from momentum the symmetric 6x6 inertia tensor is defined as • where • and P Iv 1 ( ) ( ) ( )( ) T T m m r I m r I m r r v v
- 24. • which can be interpreted from right to left as transforming the spatial velocities from B to A, then evaluating the spatial momentum at A and transforming back the momentum to B. Note that ( )( )T m r r is the 3x3 angular inertia matrix of a point mass m with relative position vector r . The transformation of the inertia from coordinate frame A to coordinate frame B is easily defined from equation P Iv as ( ) ( )T B A B A A BI X I X
- 25. Kinetic Energy and Power • It is easy to show that under the spatial transformations the kinetic energy of a rigid body is an invariant quantity. If the kinetic energy is evaluated at a coordinate system A as • Then by transforming all the quantities to a coordinate system B the kinetic energy becomes 1 2 T A A AK v I v 1 ( ) ( ) ( ) 2 1 2 T T A B B B A B B A A B B T B B B K X v X I X X v v I v
- 26. Reciprocal screws • Thus the kinetic energy is the same regardless on where it is evaluated. • Power is also an invariant defined as the linear form of a velocity twist with a force wrench. • Power evaluated on a coordinate system A as • is transformed to a coordinate system B by • If forces and velocities produce zero power then they represent reciprocal screws. T A AW v f ( ) ( )T T A B B A B B T B B W X v X f v f