Recommended
ZIP
PDF
[Track4-3] AI・ディープラーニングを駆使して、「G検定合格者アンケートのフリーコメント欄」を分析してみた
PDF
BlackBox モデルの説明性・解釈性技術の実装
PDF
PPTX
PyTorchLightning ベース Hydra+MLFlow+Optuna による機械学習開発環境の構築
PDF
PDF
データサイエンティストの仕事とデータ分析コンテスト
PDF
知識グラフの埋め込みとその応用 (第10回ステアラボ人工知能セミナー)
PDF
PDF
PDF
Surveyから始まる研究者への道 - Stand on the shoulders of giants -
PDF
PDF
PDF
金融時系列解析入門 AAMAS2021 著者発表会
PDF
PDF
PPTX
プレゼン用 きれいでわかりやすいパワーポイントを作る方法
PDF
【論文調査】XAI技術の効能を ユーザ実験で評価する研究
PDF
サポートベクトルデータ記述法による異常検知 in 機械学習プロフェッショナルシリーズ輪読会
PPTX
PDF
Sparse Codingをなるべく数式を使わず理解する(PCAやICAとの関係)
PPTX
PDF
PDF
cvpaper.challenge 研究効率化 Tips
PPTX
【DL輪読会】Hopfield network 関連研究について
PDF
PDF
PyData.Tokyo Meetup #21 講演資料「Optuna ハイパーパラメータ最適化フレームワーク」太田 健
PPTX
PDF
PDF
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
More Related Content
ZIP
PDF
[Track4-3] AI・ディープラーニングを駆使して、「G検定合格者アンケートのフリーコメント欄」を分析してみた
PDF
BlackBox モデルの説明性・解釈性技術の実装
PDF
PPTX
PyTorchLightning ベース Hydra+MLFlow+Optuna による機械学習開発環境の構築
PDF
PDF
データサイエンティストの仕事とデータ分析コンテスト
PDF
知識グラフの埋め込みとその応用 (第10回ステアラボ人工知能セミナー)
What's hot
PDF
PDF
PDF
Surveyから始まる研究者への道 - Stand on the shoulders of giants -
PDF
PDF
PDF
金融時系列解析入門 AAMAS2021 著者発表会
PDF
PDF
PPTX
プレゼン用 きれいでわかりやすいパワーポイントを作る方法
PDF
【論文調査】XAI技術の効能を ユーザ実験で評価する研究
PDF
サポートベクトルデータ記述法による異常検知 in 機械学習プロフェッショナルシリーズ輪読会
PPTX
PDF
Sparse Codingをなるべく数式を使わず理解する(PCAやICAとの関係)
PPTX
PDF
PDF
cvpaper.challenge 研究効率化 Tips
PPTX
【DL輪読会】Hopfield network 関連研究について
PDF
PDF
PyData.Tokyo Meetup #21 講演資料「Optuna ハイパーパラメータ最適化フレームワーク」太田 健
PPTX
Similar to 卒業論文発表スライド 分割統治法の拡張
PDF
PDF
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
PDF
PPT
PDF
PDF
第15回 配信講義 計算科学技術特論B(2022)
PDF
第14回 配信講義 計算科学技術特論B(2022)
PDF
PDF
PDF
DOCX
Rでの対称行列の固有値・固有ベクトルの最適な求め方
PDF
PDF
PDF
PDF
PDF
PDF
PDF
PDF
PPTX
KDD2015読み会 Matrix Completion with Queries
卒業論文発表スライド 分割統治法の拡張 1. 2013/02/06
卒業研究発表
実対称帯行列向け分割統治法の拡張
今村研究室
B4 0811112 山中 将一
2. 発表の流れ
● 研究内容
● 研究成果
– 分割統治法(D&C)アルゴリズム
– ELPA概要
– ELPA改良点調査
– ELPA通信体系調査
– ELPA と ScaLAPACK 比較実験
● まとめ
● 今後の課題
2
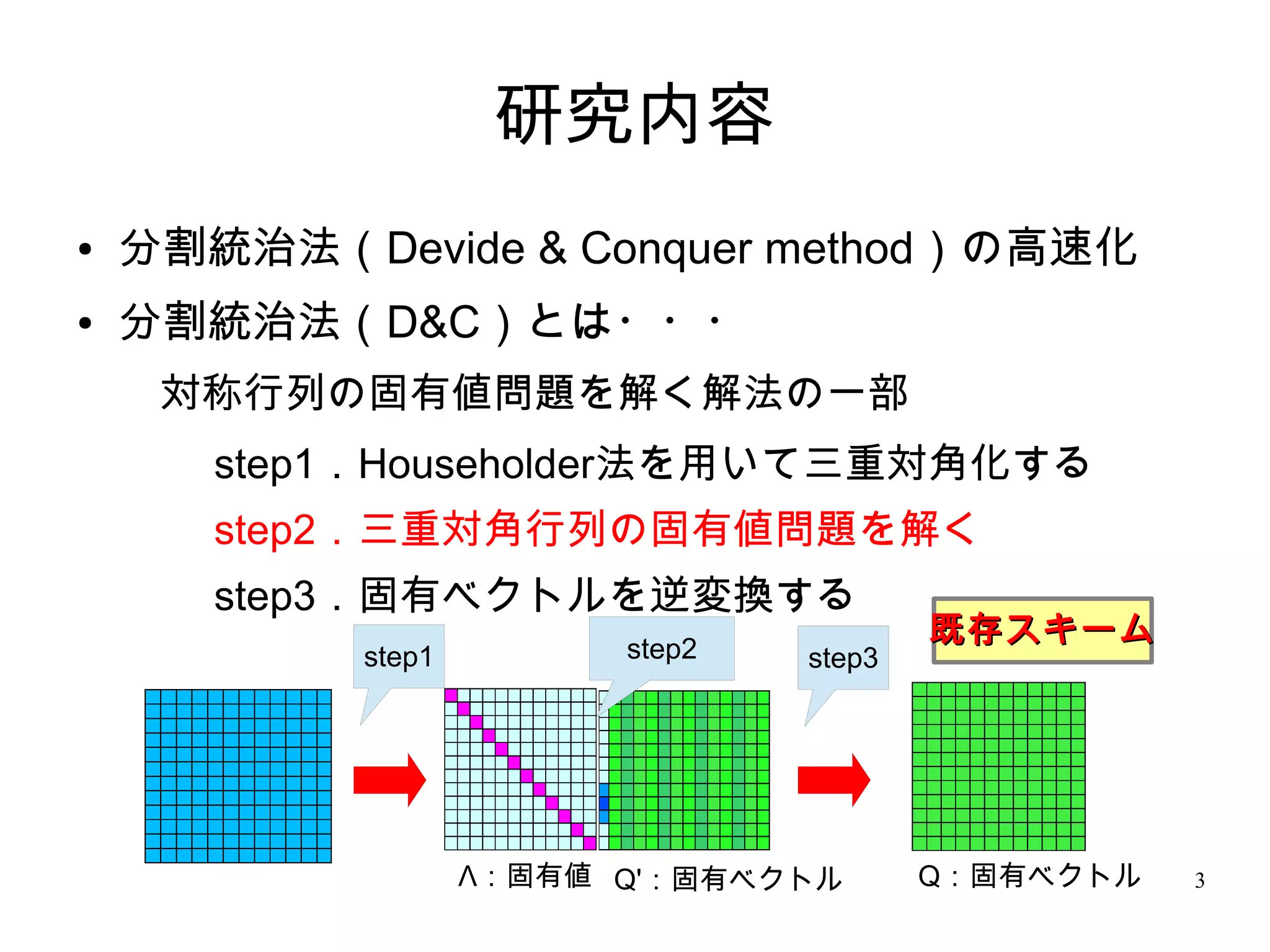
3. 研究内容
● 分割統治法(Devide & Conquer method)の高速化
● 分割統治法(D&C)とは・・・
対称行列の固有値問題を解く解法の一部
step1.Householder法を用いて三重対角化する
step2.三重対角行列の固有値問題を解く
step3.固有ベクトルを逆変換する
step2
既存スキーム
step1 step3
Λ:固有値 Q':固有ベクトル Q:固有ベクトル 3
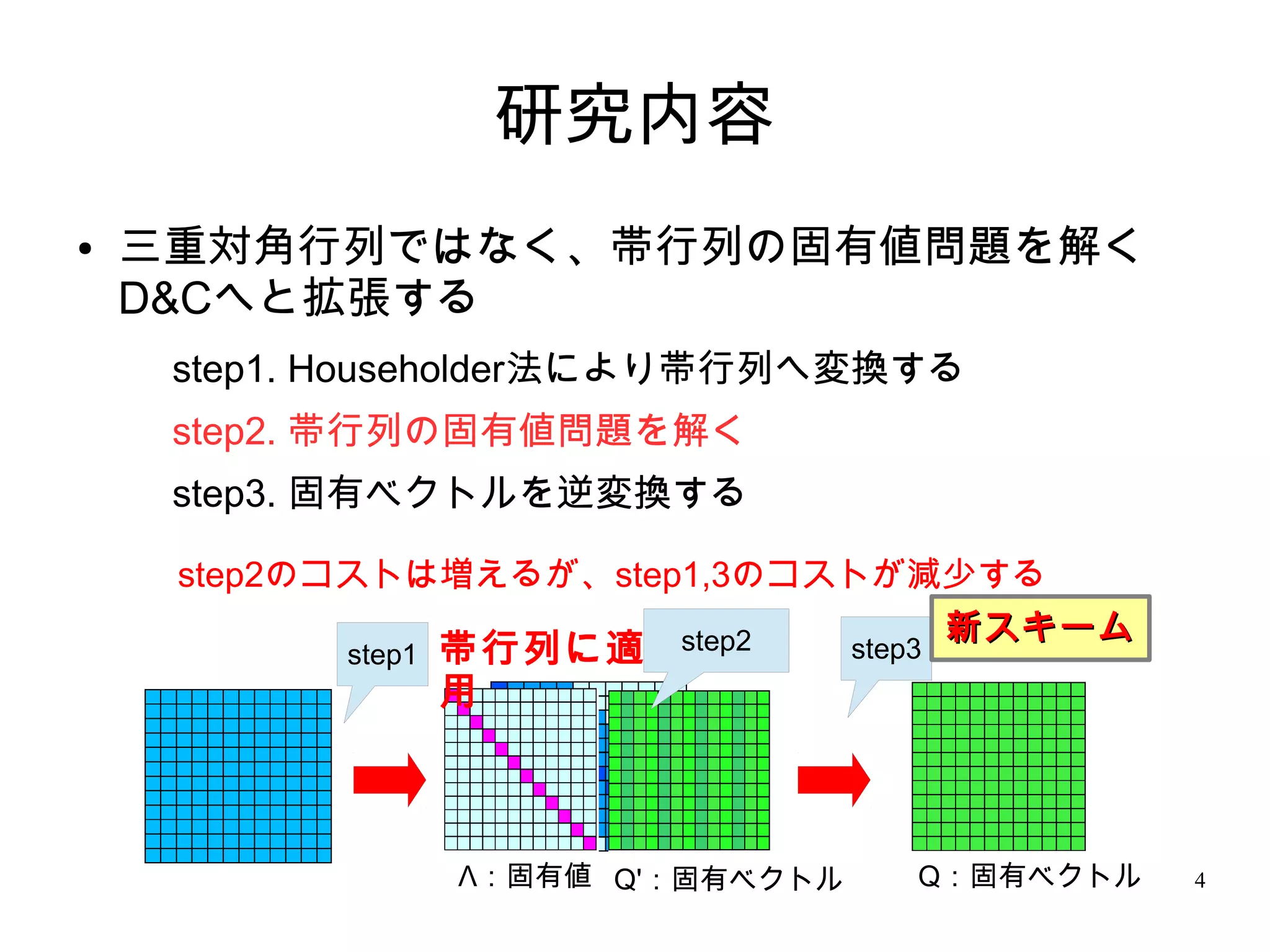
4. 研究内容
● 三重対角行列ではなく、帯行列の固有値問題を解く
D&Cへと拡張する
step1. Householder法により帯行列へ変換する
step2. 帯行列の固有値問題を解く
step3. 固有ベクトルを逆変換する
step2のコストは増えるが、step1,3のコストが減少する
新スキーム
step1 帯行列に適step2 step3
用
Λ:固有値 Q':固有ベクトル Q:固有ベクトル 4
5. 研究内容
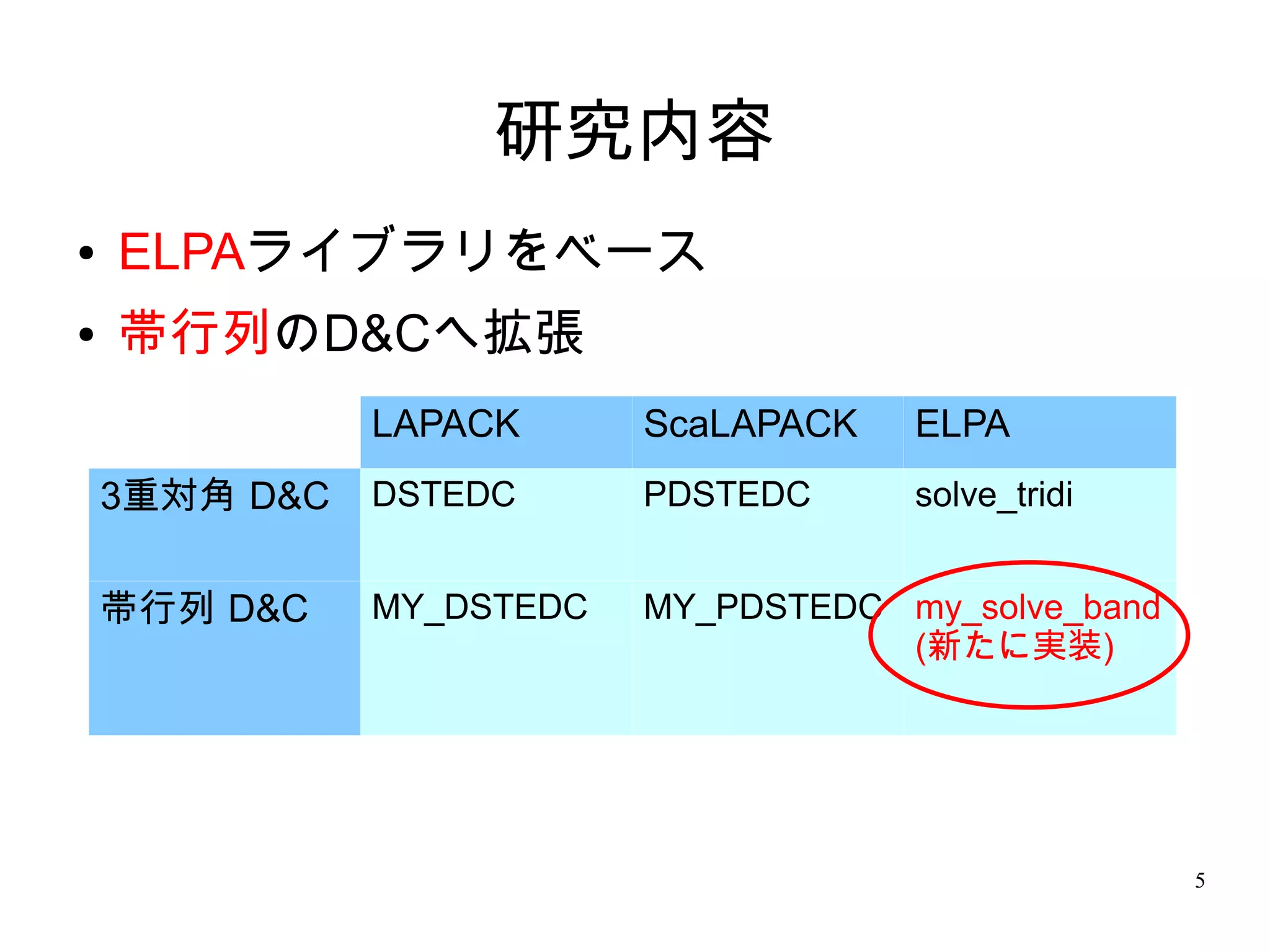
● ELPAライブラリをベース
● 帯行列のD&Cへ拡張
LAPACK ScaLAPACK ELPA
3重対角 D&C DSTEDC PDSTEDC solve_tridi
帯行列 D&C MY_DSTEDC MY_PDSTEDC my_solve_band
(新たに実装)
5
6. 3重対角D&Cアルゴリズム
3重対角向けD&Cのアルゴリズム
procedure tridiagonal eigen(T , Q , D)
(
(1)T = 1
T
) T2
+ b m vv T に分割する 分割
(2)tridiagonal eigen(T 1 , Q1 , D1 )
(3)tridiagonal eigen(T 2 , Q 2 , D 2 )
(4)Q 1 ,Q 2 , D1 , D2 で D+ cuuT を形成する
(5) deflate( D , c , u) De e作
a
lt
f 業
(6) rank1(d , c , u , Λ ,Q ' ) 1階 摂 動 cuuT =Q ' Λ Q ' T を解く
D+
統治
(
(7)Q= 1
Q
) Q2
∗Q ' を計算する
returnQ , D=Λ
6
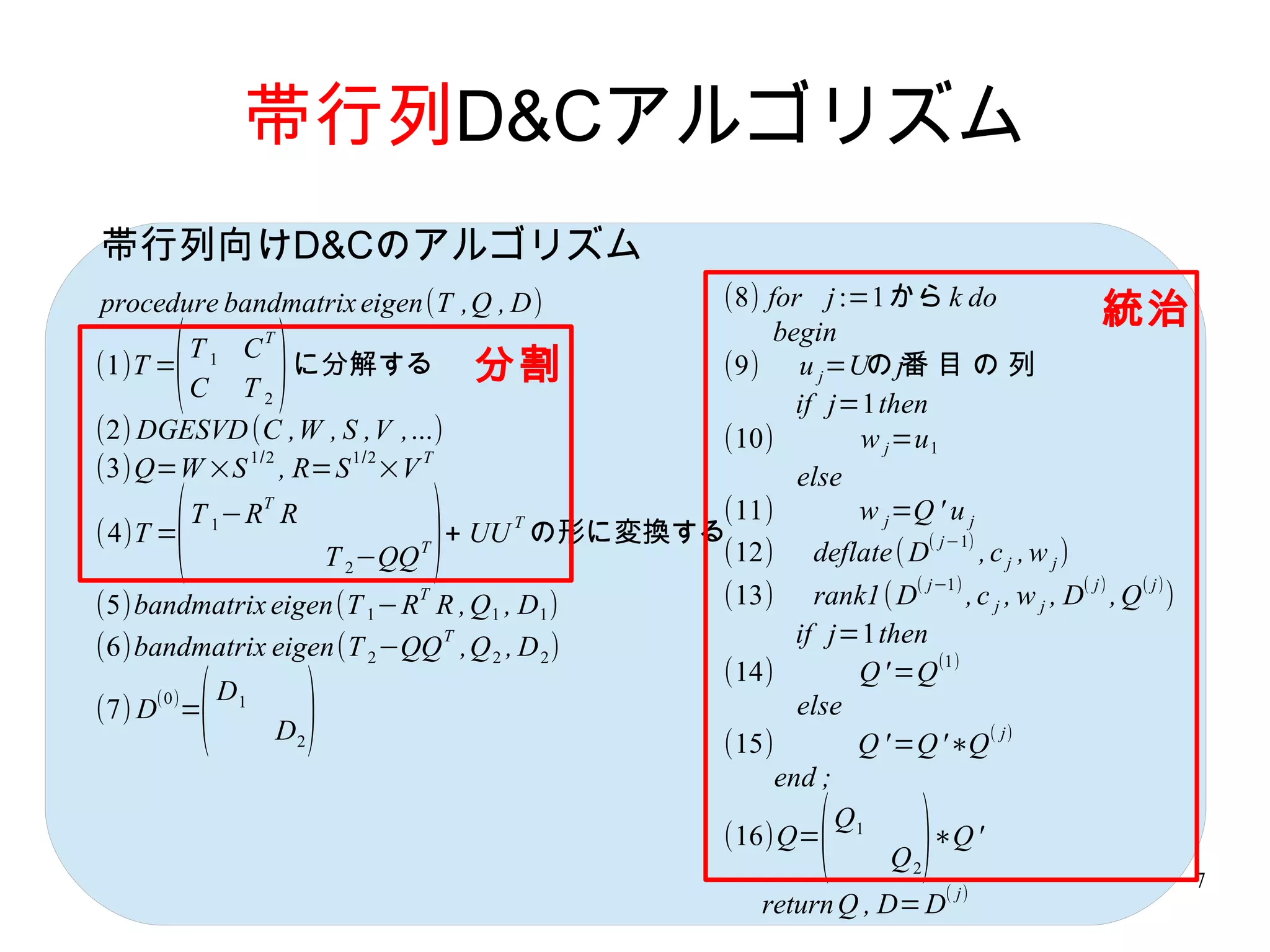
7. 帯行列D&Cアルゴリズム
帯行列向けD&Cのアルゴリズム
procedure bandmatrix eigen(T ,Q , D) (8) for j :=1から k do
begin
統治
( )
T
T1 C
(1)T = に分解する 分割 (9) u j =Uの j番 目 の 列
C T2
if j=1then
(2) DGESVD (C ,W , S ,V ,...) (10) w j =u 1
1/2 1/2 T
(3)Q=W ×S , R=S ×V else
( )
T
T 1 −R R (11) w j =Q ' u j
+ UU の形に変換する
T
(4)T = ( j−1)
T 2 −QQ T (12) deflate ( D , c j , w j)
( j−1) ( j) ( j)
T
(5)bandmatrix eigen(T 1 −R R , Q 1 , D 1 ) (13) rank1( D ,c j , w j , D ,Q )
T
(6)bandmatrix eigen(T 2 −QQ ,Q 2 , D 2 ) if j=1then
(14) Q ' =Q (1)
(0)
(7) D =
( D1
D2 ) (15)
else
Q ' =Q '∗Q
( j)
end ;
(16)Q= 1
( Q
Q2 )
∗Q '
( j)
7
return Q , D= D
8. ELPA 概要
● Eigenvalue soLvers for Petaflops Applications
● (大規模な)対称行列の固有値問題を(並列に)解く
● BLAS、LAPACK、BLACS、ScaLAPACKのサブルーチ
ン
● MPI 並列
● Faster replacements for ScaLAPACK...
● ScaLAPACKよりも高速 (遅くても2倍以上)
8
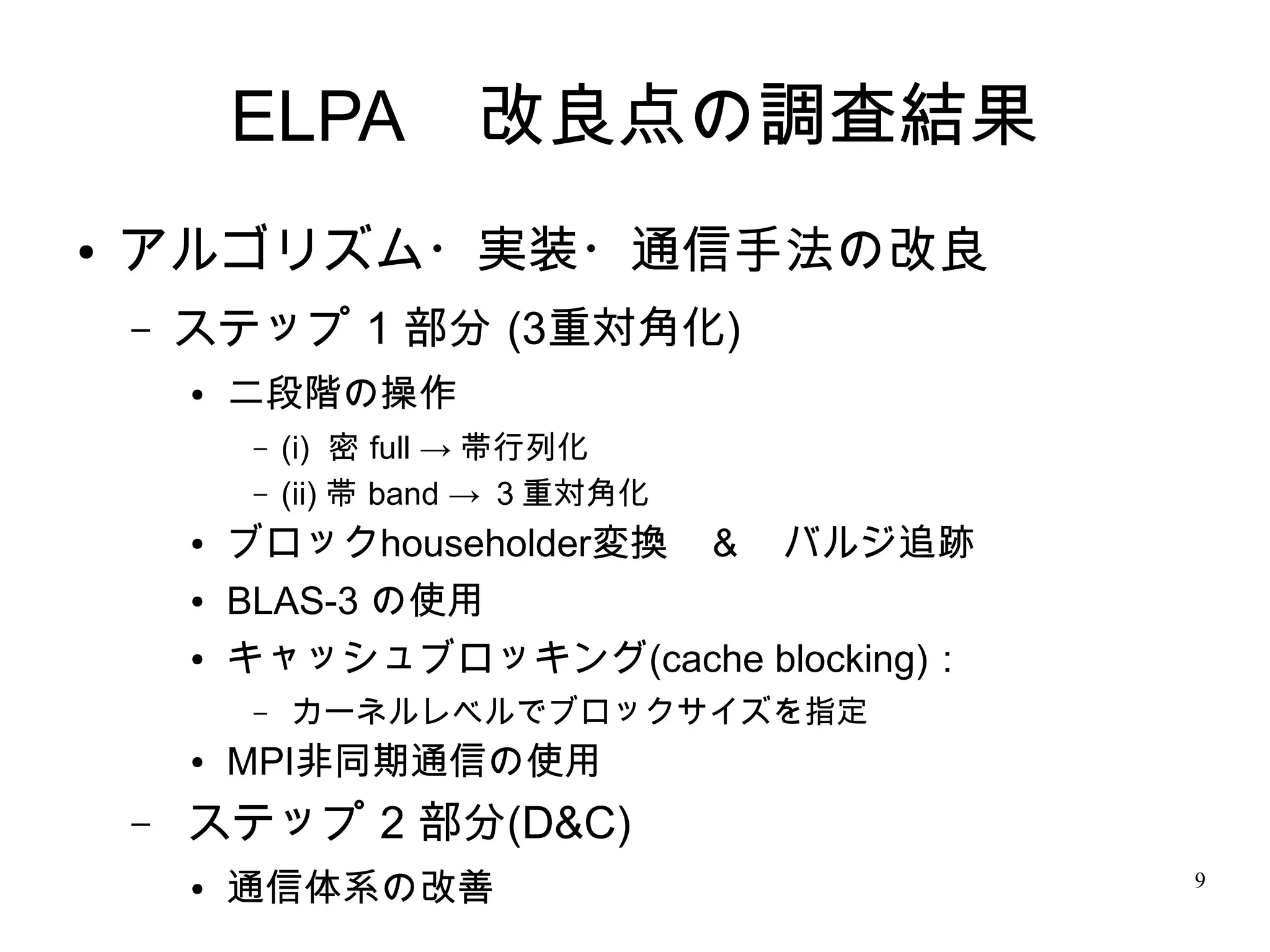
9. ELPA 改良点の調査結果
● アルゴリズム・実装・通信手法の改良
– ステップ 1 部分 (3重対角化)
● 二段階の操作
– (i) 密 full → 帯行列化
– (ii) 帯 band → 3重対角化
● ブロックhouseholder変換 & バルジ追跡
● BLAS-3 の使用
● キャッシュブロッキング(cache blocking):
– カーネルレベルでブロックサイズを指定
● MPI非同期通信の使用
– ステップ 2 部分(D&C)
● 通信体系の改善 9
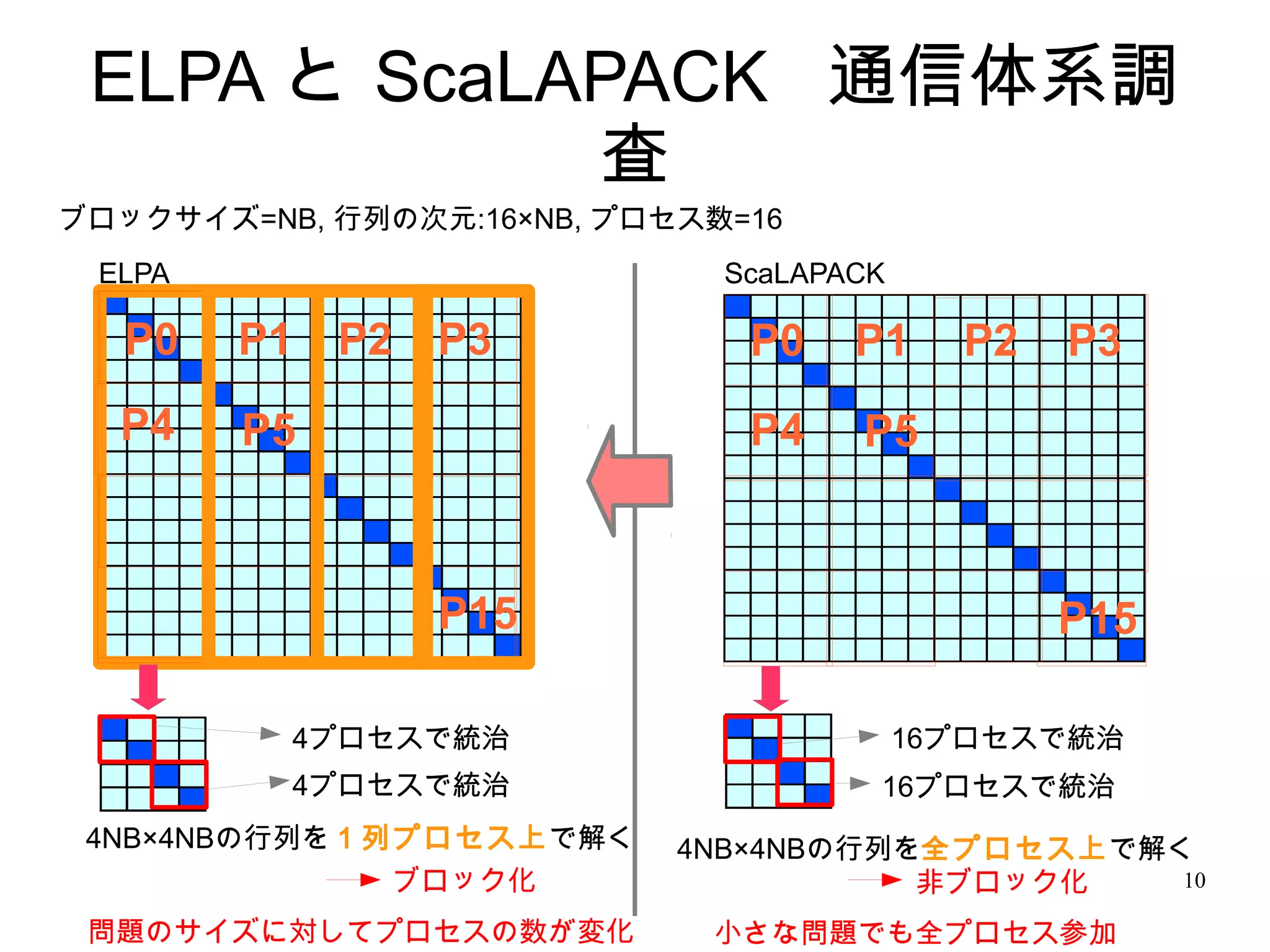
10. ELPA と ScaLAPACK 通信体系調
査
ブロックサイズ=NB, 行列の次元:16×NB, プロセス数=16
ELPA ScaLAPACK
P0 P1 P2 P3 P0 P1 P2 P3
P4 P5 P4 P5
P15 P15
4プロセスで統治 16プロセスで統治
4プロセスで統治 16プロセスで統治
4NB×4NBの行列を1列プロセス上で解く 4NB×4NBの行列を全プロセス上で解く
ブロック化 非ブロック化 10
問題のサイズに対してプロセスの数が変化 小さな問題でも全プロセス参加
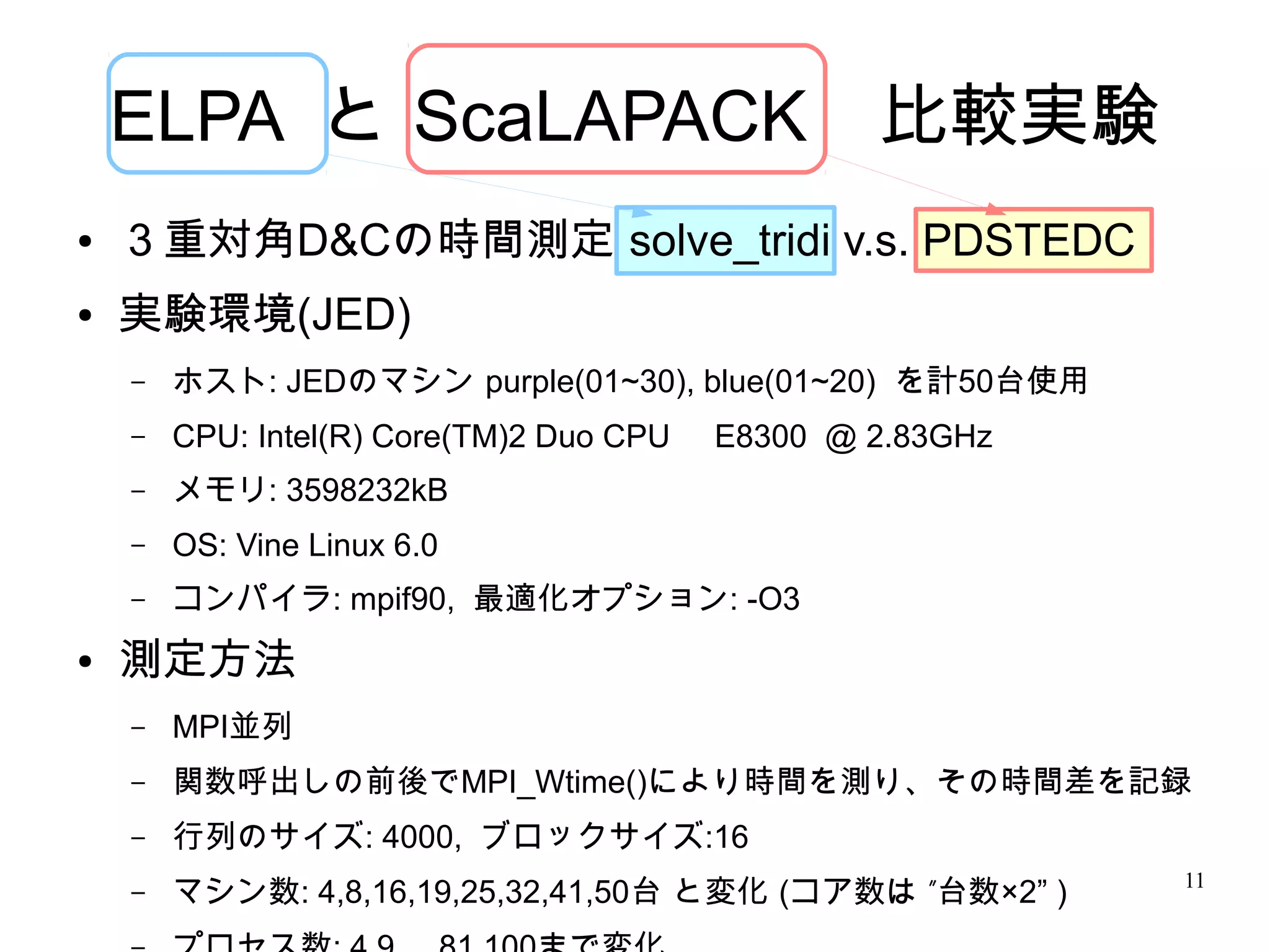
11. ELPA と ScaLAPACK 比較実験
● 3重対角D&Cの時間測定 solve_tridi v.s. PDSTEDC
● 実験環境(JED)
– ホスト: JEDのマシン purple(01~30), blue(01~20) を計50台使用
– CPU: Intel(R) Core(TM)2 Duo CPU E8300 @ 2.83GHz
– メモリ: 3598232kB
– OS: Vine Linux 6.0
– コンパイラ: mpif90, 最適化オプション: -O3
● 測定方法
– MPI並列
– 関数呼出しの前後でMPI_Wtime()により時間を測り、その時間差を記録
– 行列のサイズ: 4000, ブロックサイズ:16
11
– マシン数: 4,8,16,19,25,32,41,50台 と変化 (コア数は ”台数×2” )
12. ELPA と ScaLAPACK 比較実験
縦軸: 時間[sec]
横軸: プロセス数
青 ELPA: プロセス数・ノード数の増加に伴い、性能向上
赤 ScaLAPACK: プロセス・ノード数50以降から性能鈍化の傾向 12
13. まとめ
● ELPA:
– マシンを最大限利用 → 性能向上
– 通信手法の工夫:
● プロセスの列ブロック化
●
非同期通信
● ScaLAPACK:
– 性能鈍化の傾向
– 通信時間(同期処理など)の増加
● D&C を 3重→帯行列へ拡張
– ELPAの性能向上率は期待できる 13
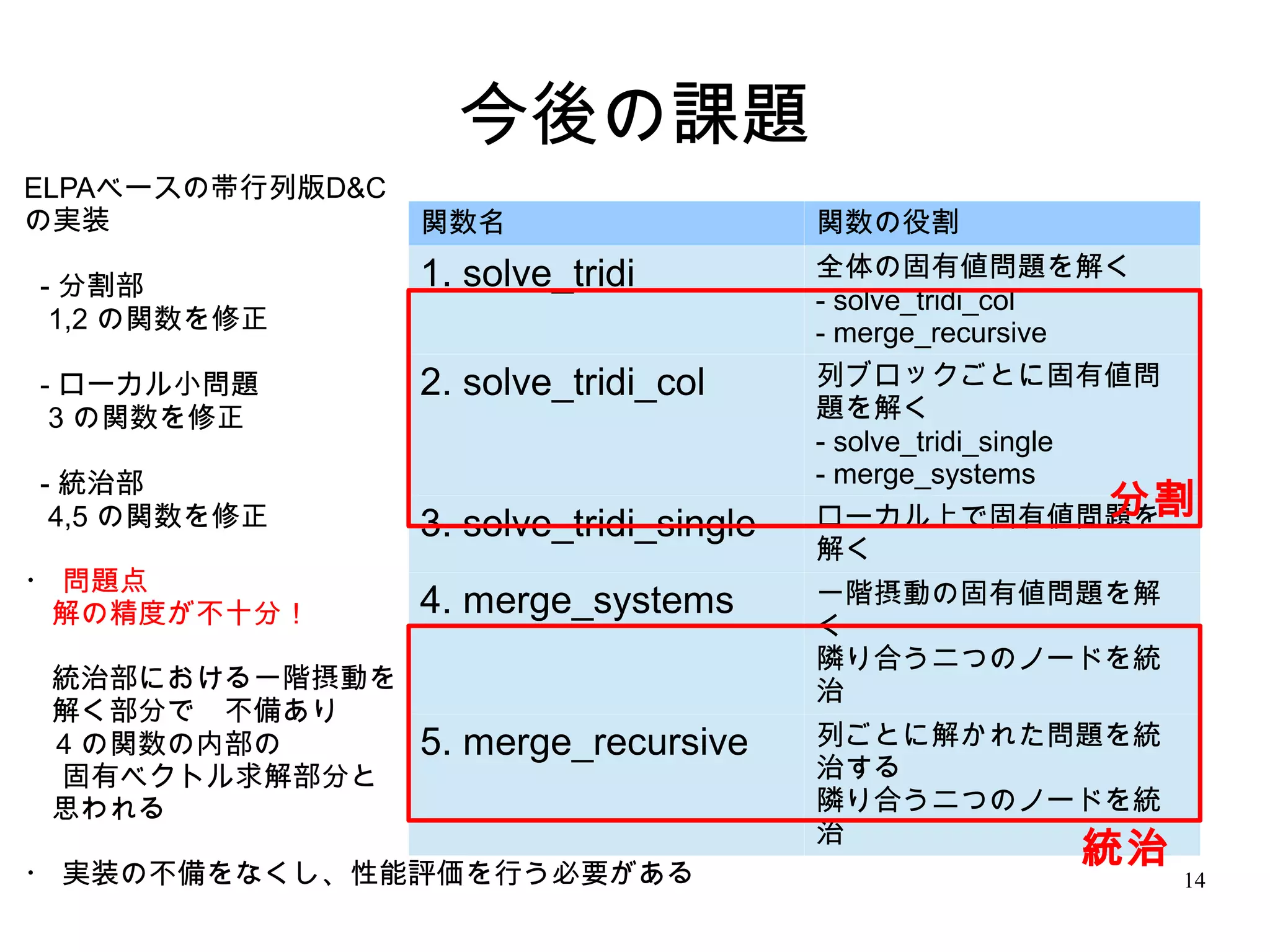
14. 今後の課題
ELPAベースの帯行列版D&C
の実装 関数名 関数の役割
1. solve_tridi 全体の固有値問題を解く
- 分割部 - solve_tridi_col
1,2 の関数を修正 - merge_recursive
- ローカル小問題 2. solve_tridi_col 列ブロックごとに固有値問
3 の関数を修正 題を解く
- solve_tridi_single
- 統治部 - merge_systems
4,5 の関数を修正 ローカル上で固有値問題を 分割
3. solve_tridi_single
解く
・ 問題点 一階摂動の固有値問題を解
解の精度が不十分! 4. merge_systems
く
隣り合う二つのノードを統
統治部における一階摂動を 治
解く部分で 不備あり
4 の関数の内部の 5. merge_recursive 列ごとに解かれた問題を統
固有ベクトル求解部分と 治する
思われる 隣り合う二つのノードを統
治
統治
・ 実装の不備をなくし、性能評価を行う必要がある 14
15. 参考文献
1. Pham Huu Phuong, 実対称帯行列の固有値問題の分割統治法の提案,
平成22年度電気通信大学電気通信学専攻修士論文
2. T. Auckenthaler, V. Blum, H.-J. Bungartz, T. Huckle, R. Johanni, L.
Krämer, B. Lang, H. Lederer, and P. R. Willems: "Parallel solution of
partial symmetric eigenvalue problems from electronic structure
calculations", Parallel Computing 37, PP.783-794 (2011).
3. http://elpa-lib.fhi-berlin.mpg.de/wiki/index.php/Main Page(ELPA ラ
イブラリフォーラムページ)
4. 桑島豊, 田村純一, 坪谷怜, 重原孝臣, 実対称固有値問題に対する多分
割の分割統治法の分散並列アルゴリズムの提案. 情報処理学会論文誌
コンピューティングシステムVol.3, No.20-29(June 2010)
15
16. 参考文献
5. 馬路徹, GPU アーキテクチャ及びGPU コンピューティング入門. シ
ニア・ソリューション・アーキテクト、NVIDIA ジャパン, GTC
Workshop Japan 2011.
6. 今村俊幸, 並列環境向けの固有値計算アルゴリズムと自動チューニン
グ, The Japan Society for Indus-trial and Applied Mathematics,
Vol.20, No.3, PP.212-222, Sep.2010 (特集:数値計算のための自動
チューニング)
16
Editor's Notes #2 続いて、私山中が発表したいと思います。 私の研究は、帯行列向け分割統治法の高速化です #4 ここでいう分割統治法とは、固有値解法のことです。 #11 ・プロセス配置は両者とも同様 ・行列を最小サイズまで分割してそれをローカルで解くところまで同様 ・二つの小問題を統治する部分において、計算手法が異なっていた ・右のスカラパックからですが、小さなサイズの二つの問題をひとつに統治する際に、全プロセスが集まって計算するようになっていました。 ・問題は、問題サイズにかかわらず全プロセスが集まって計算を行っているので、小さいサイズの問題に多くのプロセスを使用するのは通信面において非効率的 ・一方の ELPA ではそれが改善されたような設計になっていた ・プロセスを縦に列ブロック化していて、ブロック内で問題を解くように工夫されていた ・こうすることで、小さいサイズの問題にはブロック内の 4 プロセスで計算を行うようにしているため、同期のコストを抑えることができます ・問題のサイズが 2 倍になればプロセス数も 2 倍になり、効率的な通信を実現していました。 #13 コア数8の場合を見ると、 全体として性能はELPAの方が良いようにみえますが、8コアしか使用していないので、単一コアあたりの仕事量が莫大になっており、計算と通信のバランスが良くないかと思います。 最後の方は、ジグザグしたデータになっています。 コア数100の場合をみると、 ELPAはプロセスノード数100時点でも最大の性能が見られているが、ScaCALAPACKはプロセス数50付近で性能ピークを迎えていることがわかります。 #15 1 Max (||Ax-λx||) 2 max (Xt * X - I)

![ELPA と ScaLAPACK 比較実験
縦軸: 時間[sec]
横軸: プロセス数
青 ELPA: プロセス数・ノード数の増加に伴い、性能向上
赤 ScaLAPACK: プロセス・ノード数50以降から性能鈍化の傾向 12](https://image.slidesharecdn.com/20130206-130206003259-phpapp02/75/slide-12-2048.jpg)

![[Track4-3] AI・ディープラーニングを駆使して、「G検定合格者アンケートのフリーコメント欄」を分析してみた](https://cdn.slidesharecdn.com/ss_thumbnails/43dllab20200801isid-200807101606-thumbnail.jpg?width=640&height=640&fit=bounds)