KDD2015 勉強会(関東) 2015/08/29 10:30~@リクルートテクノロジーズ http://atnd.org/events/69002 ※ 当日は、文字化け&ページ欠落など多数不具合あり 失礼しました。こちらで修正されています。



![問題設定
記号
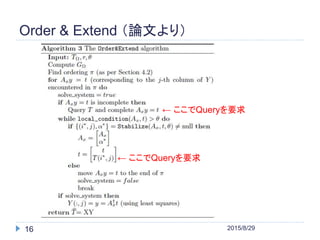
真の行列 𝑇 のうち、観測できている要素(マスク) : Ω
観測された行列 : 𝑇Ω
新規に観測する要素(クエリ) : 𝑄
問題 [ACTIVECOMPLETION]
行列 𝑇(ランク 𝑟 > 0)の一部の要素 Ω のみが既知(𝑇Ω)
さらに追加で要素 𝑄 を観測(𝑇Ω′ ; Ω′
= Ω ∪ 𝑄)
𝑇Ω′から行列補完を行った推定値 𝑇Ω′ の相対誤差
𝑅𝐸𝐿𝐸𝑅𝑅𝑂𝑅 𝑇Ω′ =
𝑇− 𝑇Ω′
𝑇
が最小となるクエリ 𝑄 を見つける。
※ 𝑋 = 𝑖=1
𝑛1
𝑗=1
𝑛2
𝑋𝑖𝑗
2
2015/8/294](https://image.slidesharecdn.com/kdd2015rsjptoshihironakae-150829124544-lva1-app6892/85/KDD2015-Matrix-Completion-with-Queries-4-320.jpg)