Download as PDF, PPTX

The document discusses the Linux scheduler, focusing on processes and threads, their characteristics, and how scheduling is handled in the Linux kernel. It explains concepts like scheduling policies, prioritization of tasks, blocking threads, preemption models, and how real-time processes are managed. Additionally, it addresses configurations for kernel preemption and their implications for system performance.
Overview of the Linux Scheduler and rights related to its content. Includes author credits.
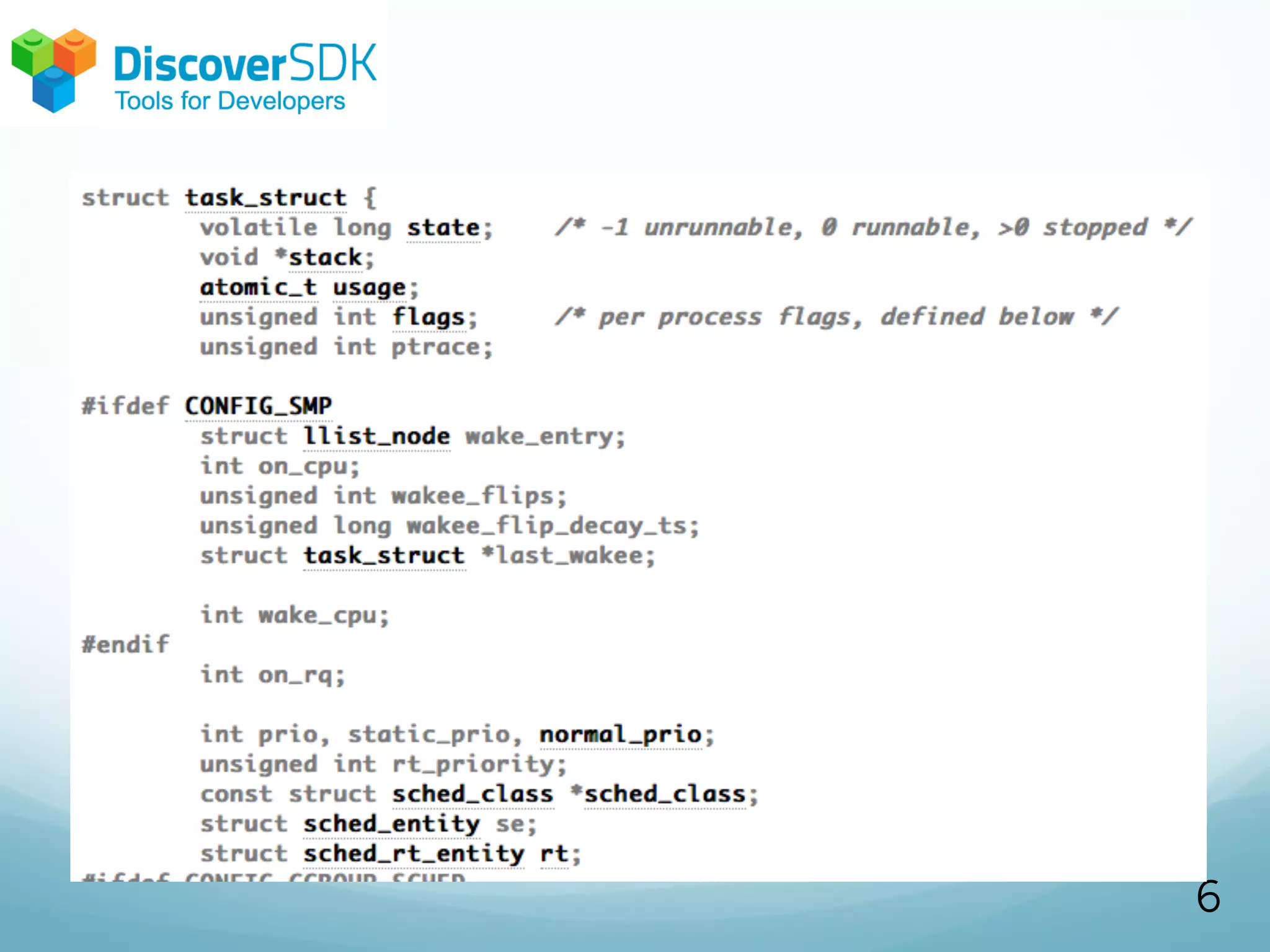
Definition of processes and threads; introduction of scheduling in kernel with task concept.
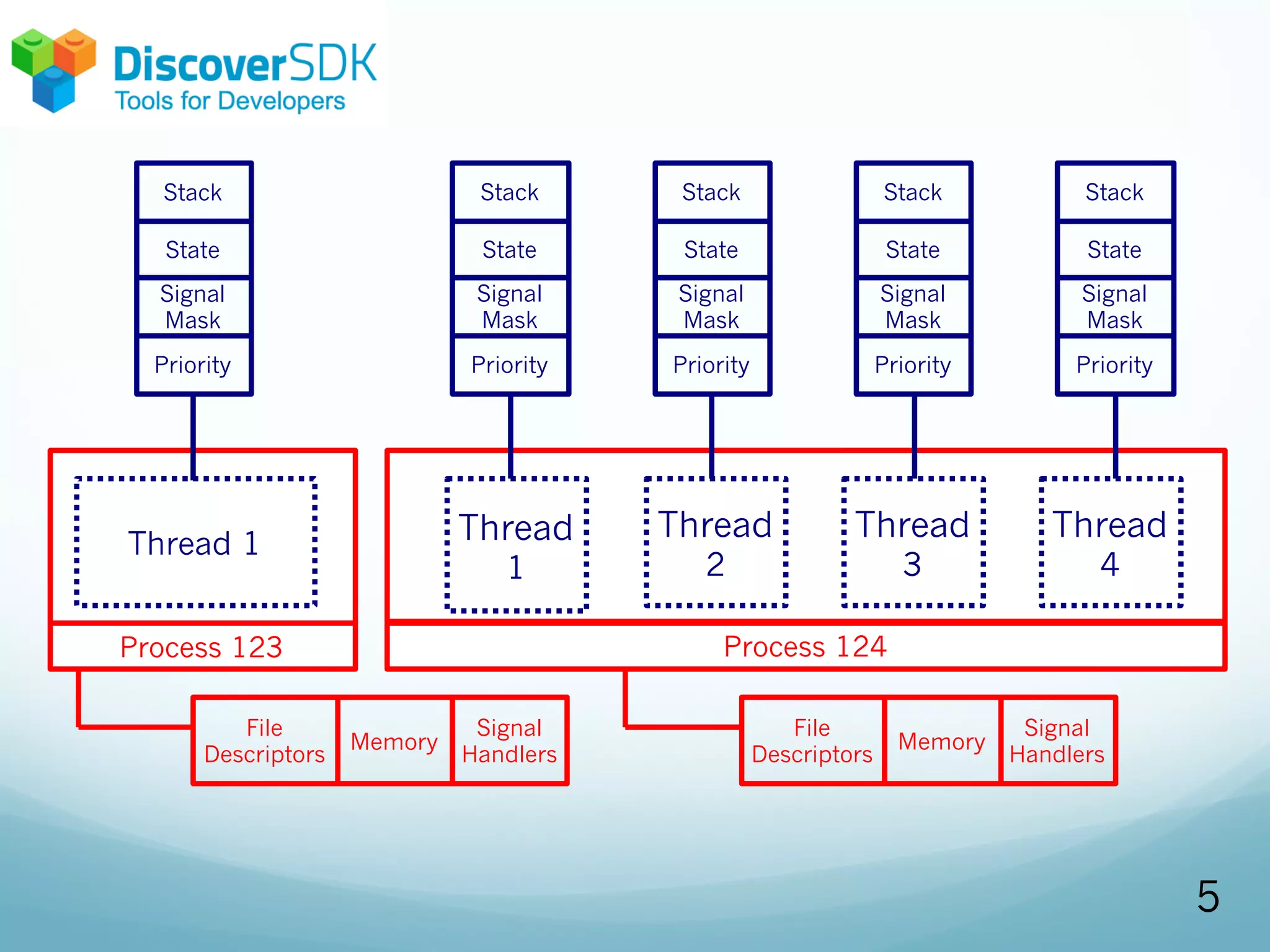
Illustration of multiple threads in processes, detailing shared resources like memory and signals.
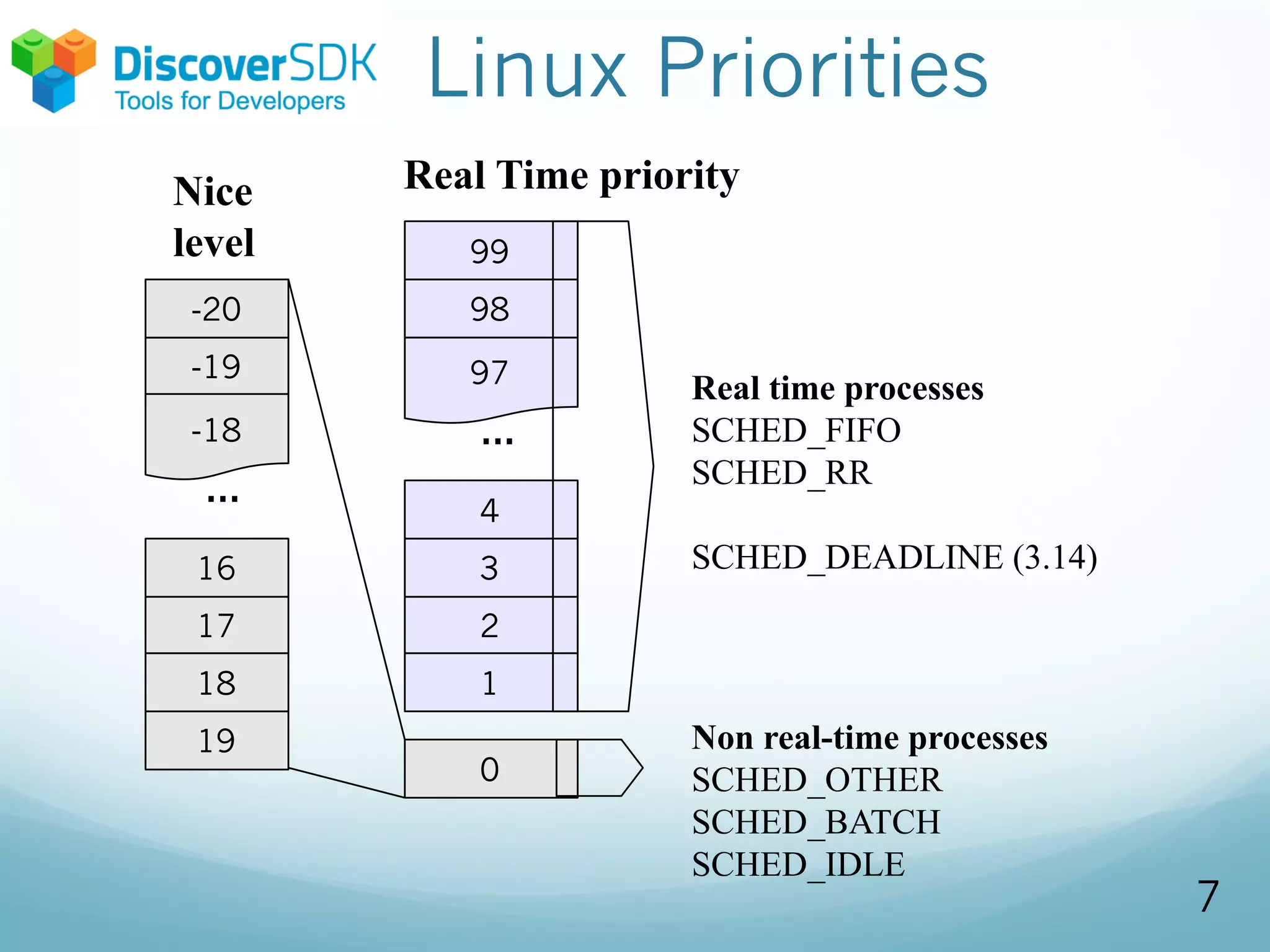
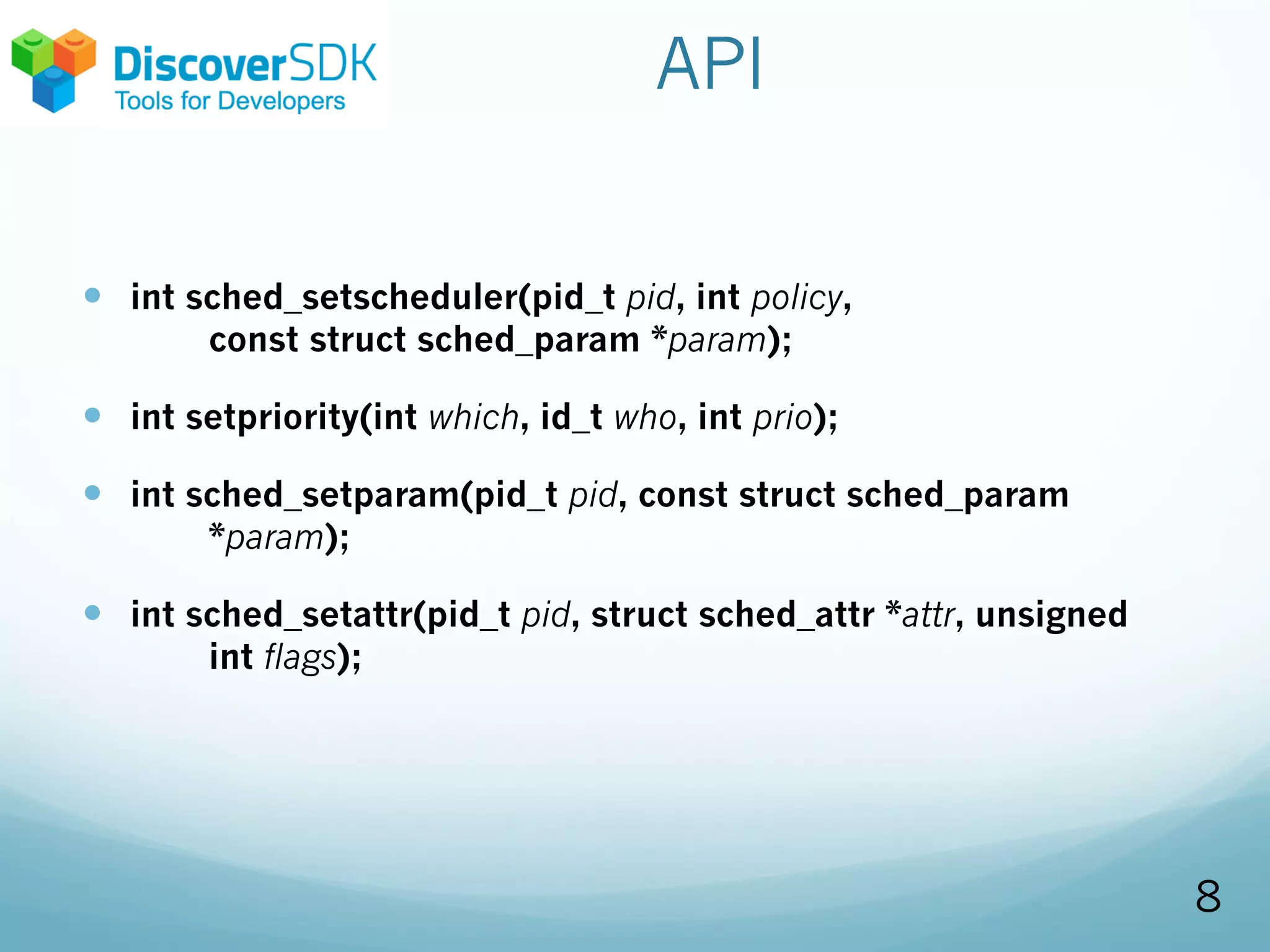
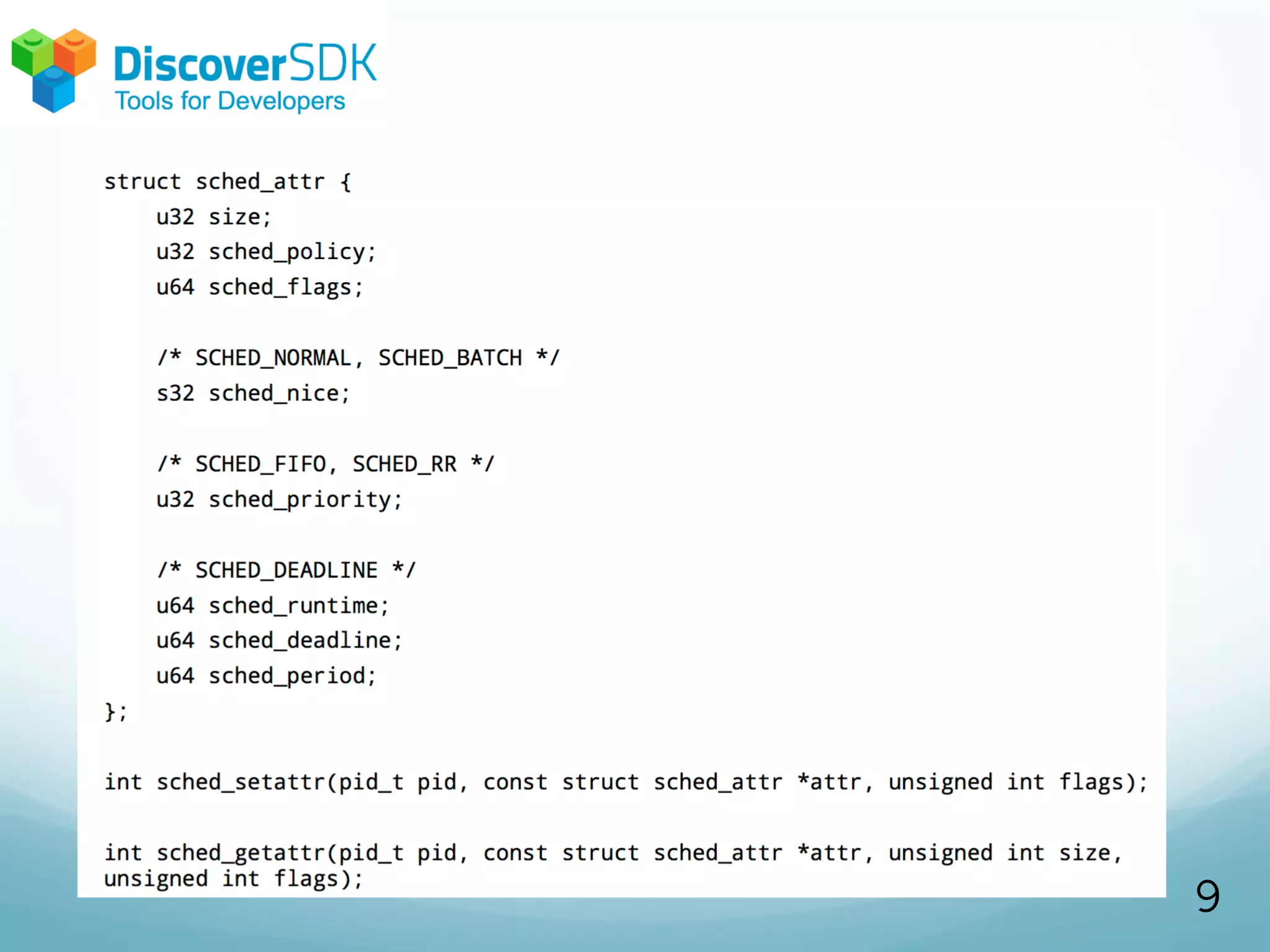
Explanation of various Linux scheduling priorities for real-time and non-real-time processes.
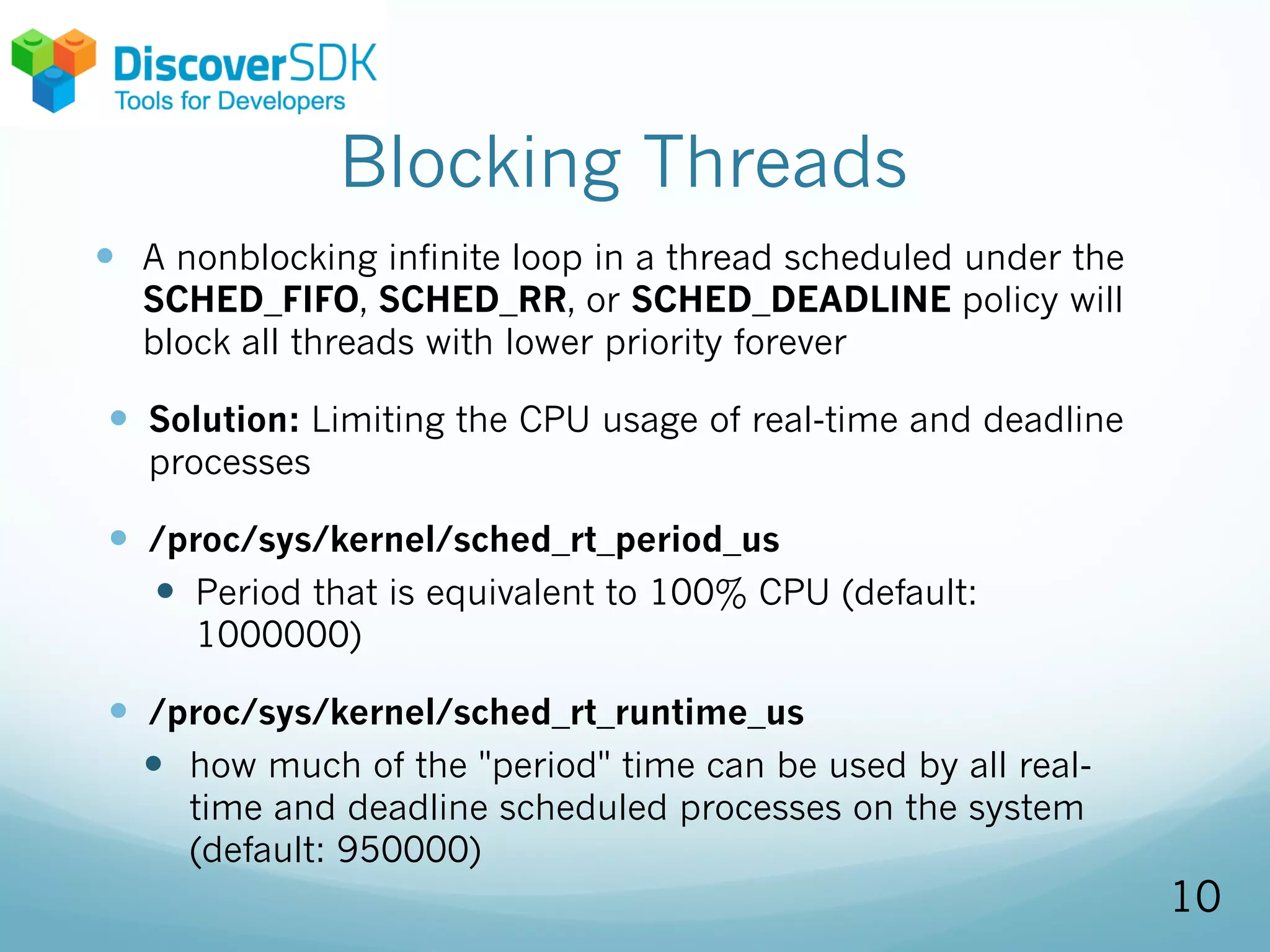
Handling of blocking threads and solutions for CPU usage related to real-time processes.
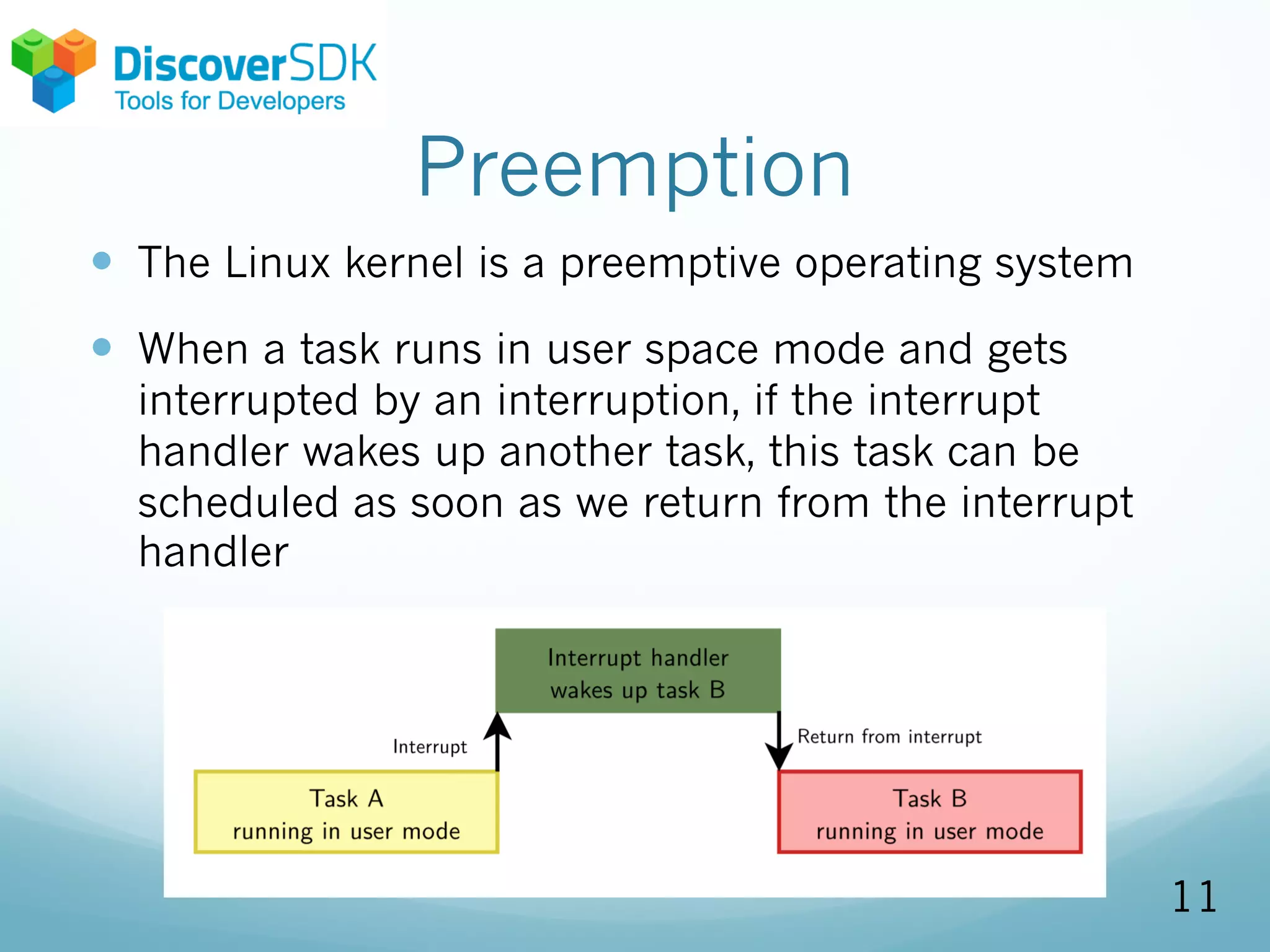
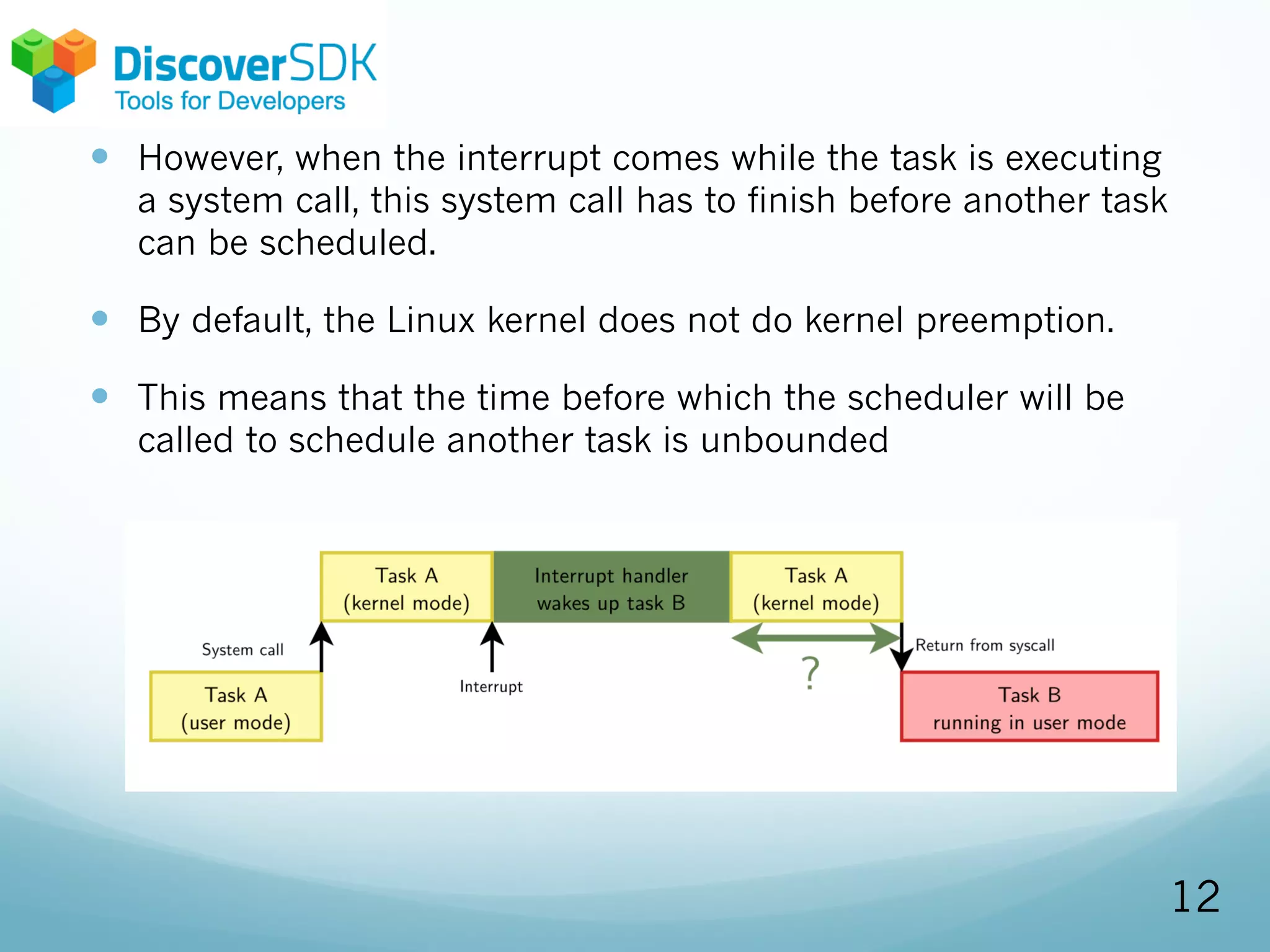
Discussion on preemption in Linux OS, including user-space tasks and system call behavior.
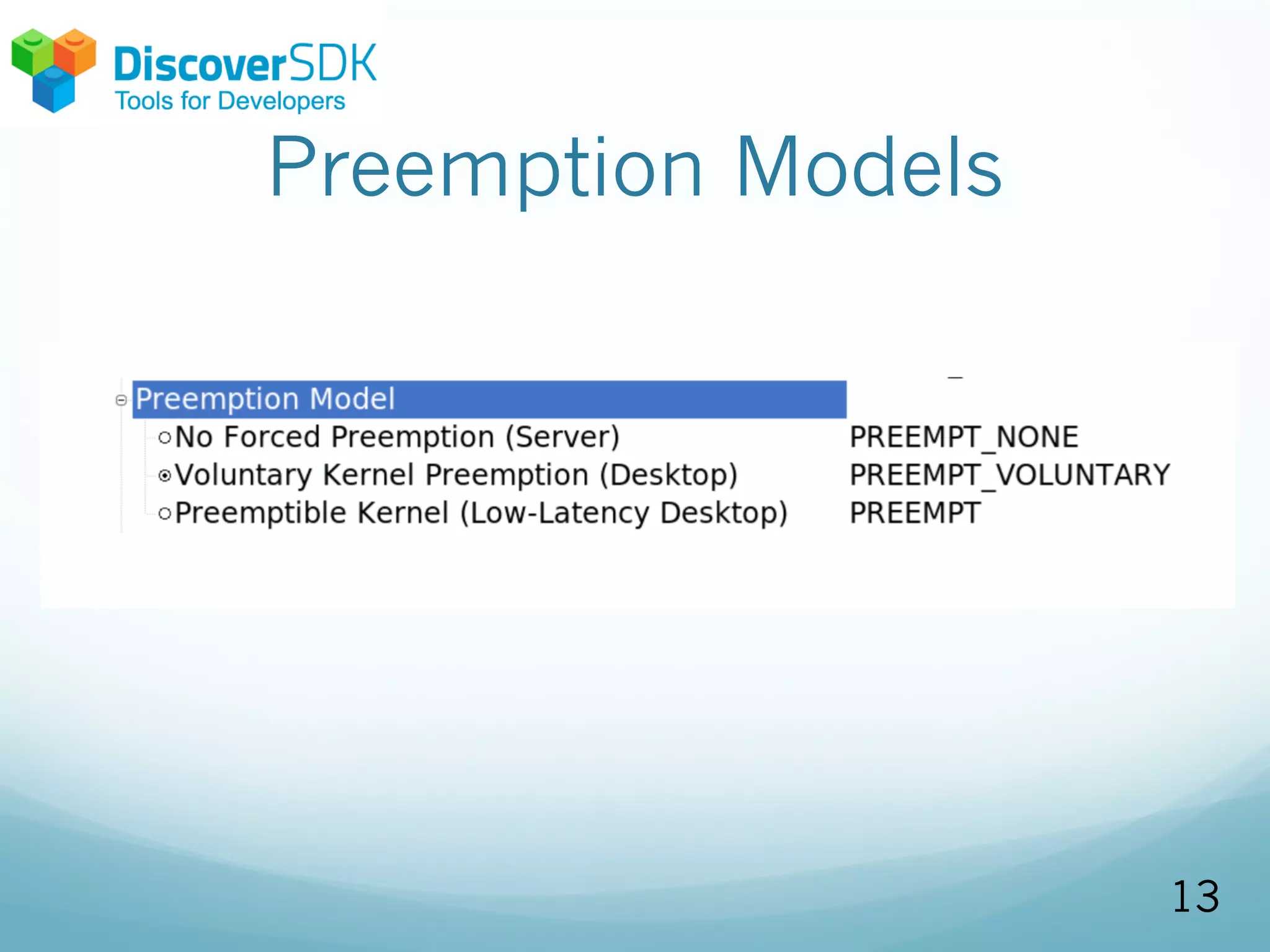
Differentiation of preemption models used in Linux kernel, outlining impact on systems and default settings.