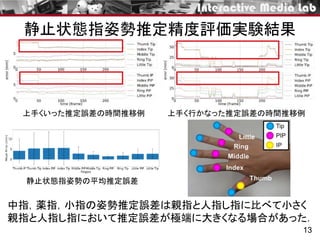
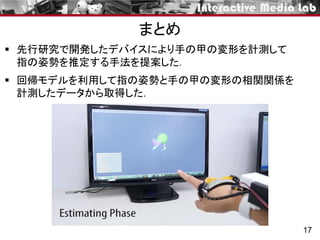
グローブ型デバイスによる指姿勢計測
2[4] GESTO: AGlove for Enhanced Sensing and Touching Based on Inertial and Magnetic Sensors for Hand Tracking and Cutaneous Feedback. Tommaso Lisini Baldi et al.
IEEE TRANSACTIONS ON HUMAN-MACHINE SYSTEMS. 2017
慣性センサや磁気センサなどを付けたグローブ型デバイスを用いて
手指の姿勢を直接計測する.
直接的な計測によって高い計測精度が得られる.
デバイスの機構や重量が手指の自然な動作を阻害する可能性
指姿勢計測の様子[4]グローブ型デバイス[4]
4.
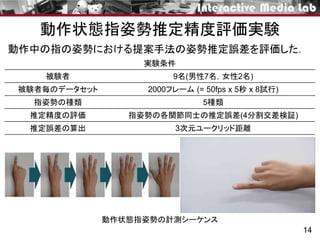
深度カメラを用いた指姿勢推定
3[5] Efficient andPrecise Interactive Hand Tracking Through Joint, Continuous Optimization of Pose and Correspondences. Jonathan Taylor et al. Siggraph 2016.
指の姿勢を推定する様子[5]
深度カメラで撮影した画像に画像処理を行い手指の姿勢を推定する.
手指にマーカなどを付けずに手指の姿勢を推定できる.
カメラに手指を映すために一定の空間を必要とする.
物体や手同士のオクルージョンによる姿勢推定への影響
深度カメラによる姿勢推定[5]
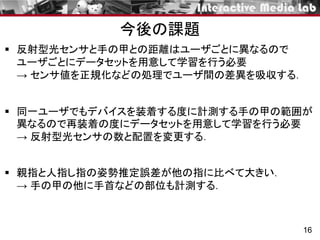
5[8] Behind ThePalm: Hand Gesture Recognition through Measuring Skin Deformation on Back Hand by Optical Sensors. Yuta Sugiura et al. SICE Annual Conference. 2017
手指の動作を阻害することなく多様な指のジェスチャを推定できるが
動作中の指姿勢は推定することができない.
装着型デバイスの反射型光センサで手の甲の変形を計測することで
指の姿勢情報を間接的に取得して指の静的ジェスチャを推定する.
手の甲の計測原理とデバイスの外観[8]手の甲を計測によるジェスチャ推定[8]
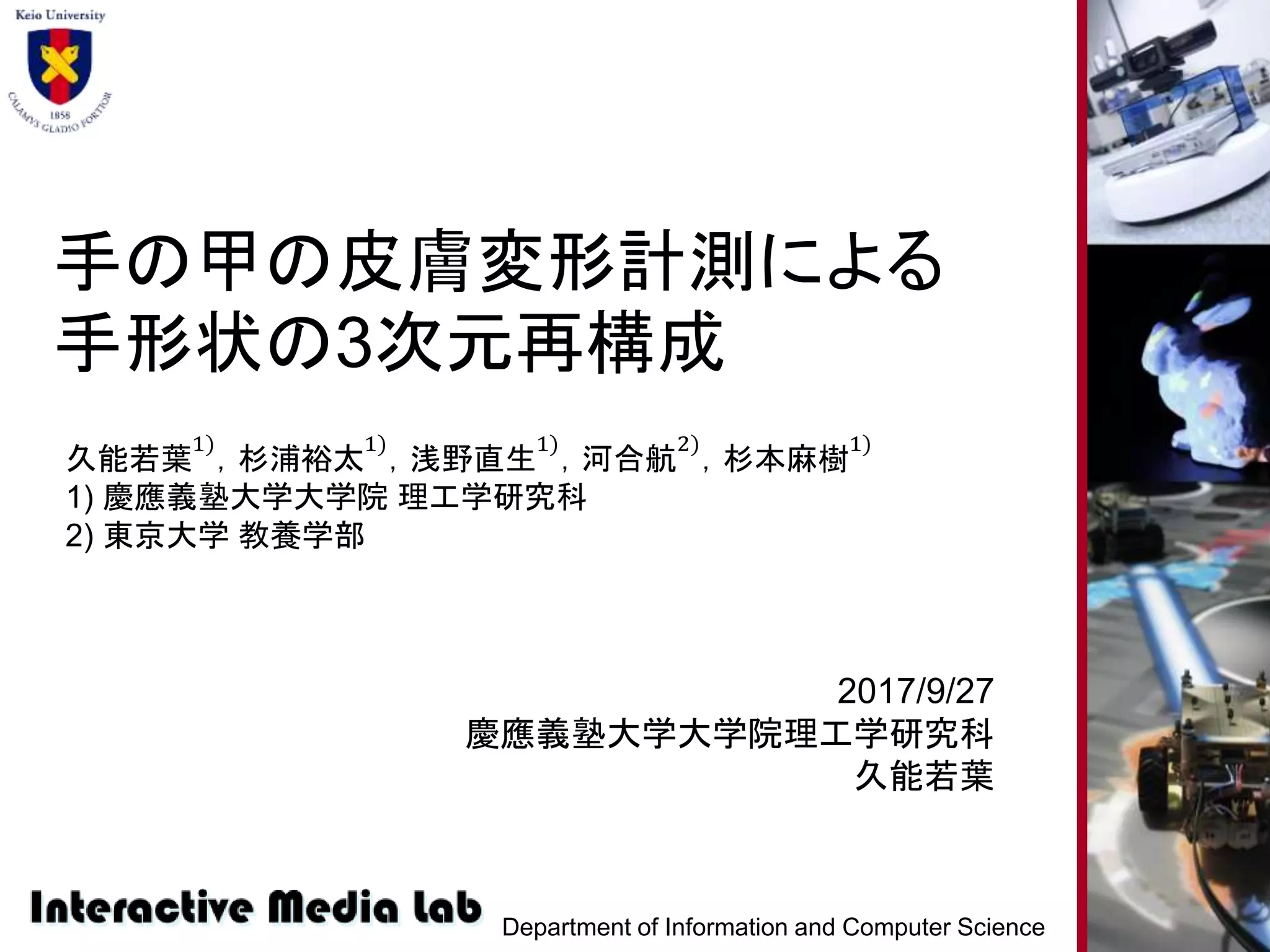
先行研究: Behind The Palm
![バーチャル環境とのインタラクション
1
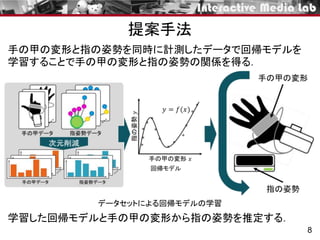
バーチャル環境の物体との直感的なインタラクションを目指す上で
手指の動作を用いたインタラクションが重要
[] https://www.leapmotion.com/ (2017/9/21アクセス)
[] https://www.youtube.com/watch?v=B9tF7_nK4lI (2017/9/21アクセス)
[] https://www.youtube.com/watch?v=4LVVpl9tCNE (2017/9/21アクセス)
コントローラを用いたインタラクション[1]
身体を直接用いたインタラクション[2][3]](https://image.slidesharecdn.com/vrsj2017-181119120737/85/3-22-2-320.jpg)
![グローブ型デバイスによる指姿勢計測
2[4] GESTO: A Glove for Enhanced Sensing and Touching Based on Inertial and Magnetic Sensors for Hand Tracking and Cutaneous Feedback. Tommaso Lisini Baldi et al.
IEEE TRANSACTIONS ON HUMAN-MACHINE SYSTEMS. 2017
慣性センサや磁気センサなどを付けたグローブ型デバイスを用いて
手指の姿勢を直接計測する.
直接的な計測によって高い計測精度が得られる.
デバイスの機構や重量が手指の自然な動作を阻害する可能性
指姿勢計測の様子[4]グローブ型デバイス[4]](https://image.slidesharecdn.com/vrsj2017-181119120737/85/3-22-3-320.jpg)
![深度カメラを用いた指姿勢推定
3[5] Efficient and Precise Interactive Hand Tracking Through Joint, Continuous Optimization of Pose and Correspondences. Jonathan Taylor et al. Siggraph 2016.
指の姿勢を推定する様子[5]
深度カメラで撮影した画像に画像処理を行い手指の姿勢を推定する.
手指にマーカなどを付けずに手指の姿勢を推定できる.
カメラに手指を映すために一定の空間を必要とする.
物体や手同士のオクルージョンによる姿勢推定への影響
深度カメラによる姿勢推定[5]](https://image.slidesharecdn.com/vrsj2017-181119120737/85/3-22-4-320.jpg)
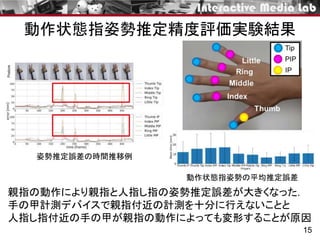
![手首や前腕の計測によるジェスチャ推定
4
手首や前腕を筋電センサや圧力センサなどで計測することで
指の動作情報を間接的に取得してジェスチャを推定する.
指の動作を直接計測せずにジェスチャを推定できるが計測部位が
指から離れているので多様な指のジェスチャを推定することが困難
前腕の筋電計測によるジェスチャ推定[6] 手首の圧力計測によるジェスチャ推定[7]
[6] Myo. https://www.myo.com (2017/9/21アクセス)
[7] WristFlex: low-power gesture input with wrist-worn pressure sensors. Dementyev A. and Paradiso A. J.. ACM symposium on User interface software and technology. 161-166. 2014.](https://image.slidesharecdn.com/vrsj2017-181119120737/85/3-22-5-320.jpg)
![5[8] Behind The Palm: Hand Gesture Recognition through Measuring Skin Deformation on Back Hand by Optical Sensors. Yuta Sugiura et al. SICE Annual Conference. 2017
手指の動作を阻害することなく多様な指のジェスチャを推定できるが
動作中の指姿勢は推定することができない.
装着型デバイスの反射型光センサで手の甲の変形を計測することで
指の姿勢情報を間接的に取得して指の静的ジェスチャを推定する.
手の甲の計測原理とデバイスの外観[8]手の甲を計測によるジェスチャ推定[8]
先行研究: Behind The Palm](https://image.slidesharecdn.com/vrsj2017-181119120737/85/3-22-6-320.jpg)
![手の甲変形の計測
11
慣性センサや磁気センサなどよりも小型で軽量な反射型光センサで
手の甲変形のみを計測するため指の動作を阻害せず計測できる.
指の姿勢も赤外線を用いて計測するので反射型光センサに干渉
→ 5回計測した値の最小値をセンサ値として計測する.
手の甲の計測原理とデバイスの外観[8]
[8] Behind The Palm: Hand Gesture Recognition through Measuring Skin Deformation on Back Hand by Optical Sensors. Yuta Sugiura et al. SICE Annual Conference. 2017](https://image.slidesharecdn.com/vrsj2017-181119120737/85/3-22-12-320.jpg)






































![[FIT2025 トップコンファレンスセッション]EarHover: ヒアラブルデバイスにおける音漏れ信号を用いた空中ジェスチャ認識](https://cdn.slidesharecdn.com/ss_thumbnails/fit2025-presentationv2-251006033725-c7651715-thumbnail.jpg?width=640&height=640&fit=bounds)











