1. 278
Qнавант
Vд
Ωд
Mем
ГВД
ППр
(ЕУ)
ГП
Uу
UБм
Qуж
My
ПЗ
2.5. ЕЛЕКТРОГІДРАВЛІЧНІ ВИКОНАВЧІ ПРИВОДИ
2.5.1. Функціональна схема та галузі застосування гідравлічних
виконавчих приводів
Електрогідравлічним приводом (ЕГПр) називається сукупність
електричних пристроїв та гідравлічних машин, що служать для приведення
в рух робочих механізмів управління об’єктом регулювання.
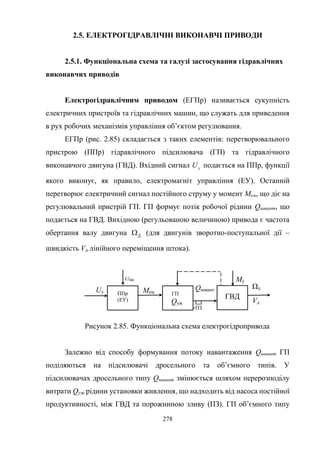
ЕГПр (рис. 2.85) складається з таких елементів: перетворювального
пристрою (ППр) гідравлічного підсилювача (ГП) та гідравлічного
виконавчого двигуна (ГВД). Вхідний сигнал y
U подається на ППр, функції
якого виконує, як правило, електромагніт управління (ЕУ). Останній
перетворює електричний сигнал постійного струму у момент Мем, що діє на
регулювальний пристрій ГП. ГП формує потік робочої рідини Qнавант, що
подається на ГВД. Вихідною (регульованою величиною) привода є частота
обертання валу двигуна Д
(для двигунів зворотно-поступальної дії –
швидкість Vд лінійного переміщення штока).
Рисунок 2.85. Функціональна схема електрогідропривода
Залежно від способу формування потоку навантаження Qнавант ГП
поділяються на підсилювачі дросельного та об’ємного типів. У
підсилювачах дросельного типу Qнавант змінюється шляхом перерозподілу
витрати Qуж рідини установки живлення, що надходить від насоса постійної
продуктивності, між ГВД та порожниною зливу (ПЗ). ГП об’ємного типу
2. 279
являють собою насоси змінної продуктивності в яких гідропривід має
замкнений контур циркуляції робочої рідини ГП–ГВД (пунктирна лінія). За
типом ГП прийнято класифікувати і ЕГПр у цілому.
Перевагою ЕГПр дросельного регулювання є їх відносна простота
конструкції. Однак наявність безповоротних втрат енергії у потоці рідини,
що йде на злив, призводить до того, що ККД не перевищує 18–20 %. Втрати
енергії робочої рідини в ЕГПр об’ємного регулювання зведені до мінімуму
і визначаються, в основному, витоками. Їх ККД становить 27–35 %.
ЕГПр мають необхідну жорсткість характеристик, великі коефіцієнти
підсилення потужності 3 4
10 10
N
k , високу швидкодію та дозволяють
забезпечувати потрібні кратності регулювання частоти обертання вала
двигуна (швидкості Vд лінійного переміщення штока). Це зумовлює
застосування цих приводів поряд з електромашинними у КУО танків.
2.5.2. Гідравлічні підсилювачі дросельного типу
Дросельним називається ГП, що здійснює розподіл робочої рідини,
яка надходить від насоса Qн, між ВД та порожниною зливу шляхом зміни
прохідного перерізу регульованого дроселя. Найбільшого застосування в
АСУО отримали голчасто-клапанні та золотникові (рис. 2.86) дросельні ГП.
Робоча рідина нагнітається насосом з постійною продуктивністю
н const
Q і надходить у порожнини гідроциліндра (гідродвигуна).
Одночасно рідина дроселюється на злив через перерізи, утворені голками
(золотниками) та сідлами регульованих дроселів. У початковому положенні
голок (золотників) прохідні перерізи зливу S0 залежать від висоти h0 їх
обладнання та визначають початковий тиск р0 у системі. Це досягається
заводським регулюванням ГП.
При переміщенні голок (золотників) під дією моменту М у той чи
інший бік на значення h
зміняться і прохідні перерізи дроселів S h
.
3. 280
ППр
(ЕУ)
Отже, зміниться витрата рідини через дроселі, спричинивши тим самим
зміну витрати рідини навант
Q
на навантаження (гідродвигун).
а) б)
Рисунок 2.86. Дросельні голчасто-клапанний (а) та золотниковий (б)
ГП
Таким чином, вхідною величиною ГП слід вважати зміну прохідних
перерізів дроселів S
або переміщення голок (золотників) h
, а вихідною
– зміну витрати рідини на навантаженні навант
Q
, що поступає в гідродвигун.
навант
( ) .
S h Q
У початковому положенні голок (золотників), коли момент
управління електромагніта М = 0, рівняння витрат рідини ВР
Q через ГП може
бути записане як
0
2
навант
10
навант
20
д
10
д Q
Q
Q
Q
QВР
де д 0
i
Q – початкова витрата рідини через і-й дросель;
M
M
h0 Δs0
s0
Δh Δs
Qд
Qн
Qн
Qд
Qд
Qд
Qнавант.
Qнавант.
Qнавант.
Qнавант.
Δh Δs
h0
ВД ВД
ПЗ
4. 281
навант 0
i
Q – початкова витрата рідини на навантаження через і-й переріз.
При абсолютно точному технологічному виконанні дроселів та
перерізів виходу витрати рідини на навантаження отримуємо:
навант0
0
0
навант0
0
навант 2
2
2
2 Q
Р
сS
Q
Q
Q Д
(2.8)
де 0
P – початковий тиск у системі;
2
μ
γ
g
c – стала ГП, що визначається коефіцієнтом витрати μ та питомою
вагою γ рідини.
Зміна під дією моменту М положення голок (золотників) приведе до
зміни витрати рідини через ГП, змінюючи тим самим витрату при
навантаженні:
)
(
2
)
(
2 навант
навант
0
0
н q
Q
P
P
S
S
с
Q
де S
– зміна перерізу дроселя;
P
– зміна тиску в системі;
навант
q
– зміна витрати рідини при навантаженні.
Після розкладення виразу P
P
0 у степеневий ряд та підстановки
його у попередній вираз, одержимо витрати рідини при навантаженні:
навант
0
навант
0
0
0
0
0 2
2
2 Q
Q
P
P
S
c
P
S
c
P
P
cS
P
сS
QВРН
(2.9)
де навант навант1 навант2
Q q q
– сумарна зміна витрати робочої рідини на
навантаженні ГП.
5. 282
Оскільки const
QВРН , прирівняємо значення рівнянь (2.8), (2.9) та
знайдемо ∆Qнавант:
P
P
cS
S
P
c
Q
Q
Q P
S
0
0
навант 2 (2.10)
де Qs
– зміна витрати в ГП за рахунок зміни прохідних перерізів дроселів;
P
Q
– зміна витрати в ГП за рахунок зміни тиску в системі.
Структурна схема ГП дросельного типу та його регулювальна
характеристика, наведені на рис. 2.87. Позначення, які прийняті на схемі:
0
навант
ГП 2 P
c
S
Q
k
– коефіцієнт підсилення ГП;
P
P
cS
P
Q
G p
ГП
0
– провідність підсилювача.
а) б)
Рисунок 2.87. Структурна схема (а) та регулювальна характеристика
(б) ГП
γ
ΔQнавант
ΔS
ΔP
ΔQs
ΔQp
ΔQнавант
γВРН
ΔS
Gгп
Kгп
6. 283
γ
Qнав
Q0
Ω
D
d
1 2
3
4
Таким чином, ГП еквівалентний безінерційній динамічній ланці.
Коефіцієнт підсилення визначається власними конструктивними
параметрами і властивостями робочої рідини.
2.5.3. Гідравлічні підсилювачі об’ємного типу
Об’ємним називається ГП, що формує потік робочої рідини за
рахунок зміни своєї продуктивності.
У танковій автоматиці широко використовуються об’ємні ГП, які
виконані у вигляді насосів змінної продуктивності. Прикладом такого
підсилювача може служити аксіальний роторно-поршневий насос (рис.
2.88). Підсилювач складається з корпусу 2, блока циліндрів 1, розподільника
3 та шайби 4. Поршні розміщені у блоці циліндрів та з’єднані за допомогою
штоків з шайбою.
При обертанні блока циліндрів від приводного двигуна з кутовою
частотою Ω0, поршні, обертаючись разом з блоком, виконують зворотно-
поступальний рух. Чим більшим є кут нахилу ﻻн шайби 4, тим більшим буде
хід кожного поршня. За один оберт блока кожен поршень здійснює два ходи:
при русі поршня на шайбу відбувається усмоктування рідини, при русі від
неї – нагнітання. Торцева частина блока циліндрів сковзає по площині
розподільника 3, який забезпечує сполучення ГП з площинами гідродвигуна
навантаження.
Рисунок 2.88. Об’ємний
гідравлічний підсилювач:
1 – блок циліндрів; 2 – корпус; 3
– розподільник; 4 – шайба
7. 284
Схему перетворення сигналів у ГП об’ємного типу одержимо на
основі принципу його роботи:
навант
н Q
Витрата робочої рідини, що подається підсилювачем на
навантаження, може бути знайдена виходячи з продуктивності насоса та
існуючих витоків:
вит
навант Q
Q
Q Н
(2.11)
Продуктивність насоса Н
Q визначається сумарним робочим об’ємом
усіх циліндрів і частотою обертання блока:
0
V
QН .
Переходячи до конструктивних параметрів ГП, маємо:
Н
н D
zS
Q
sin
0
п
де z – число поршнів у блоці;
п
S – площа поршня.
Введемо позначення kГП передавального коефіцієнта ГП. Тоді для
кутів повороту шайби ±(15–20)º отримаємо:
Н
ГП
Н
Н k
D
zS
Q
sin
0
п . (2.12)
Сумарні витоки у підсилювачі пропорційні різниці тисків у
порожнинах всмоктування та нагнітання:
8. 285
P
G
Q ГП
вит
(2.13)
де ГП
G – провідність підсилювача.
Підставимо значення (2.12), (2.13) у початковий вираз (2.11). Маємо
рівняння руху ГП:
P
G
k
Q Н
ГП
ГП
навант (2.14)
Рівняння (2.14) є повністю еквівалентним рівнянню (2.10) ГП
дросельного типу і відрізняється від нього лише значеннями передавальних
коефіцієнтів. Отже, структурній схемі об’ємного ГП з урахуванням
зроблених зауважень може відповідати схема, наведена на рис. 2.87.
2.5.4. Гідравлічні виконавчі двигуни
Гідравлічним виконавчим двигуном (ГВД) називається гідравлічна
машина, що перетворює енергію потоку робочої рідини у механічну
енергію.
У складі КУО танків застосовують ГВД як зворотно-поступального,
так і обертального руху. До перших належать гідравлічні циліндри
(гідроциліндри), до других – аксіальні та радіальні роторно-поршневі
гідродвигуни.
Гідравлічний циліндр (рис. 2.89) складається з корпусу 1, двох кришок
3 та поршня 2 зі штоком. Порожнини циліндрів з’єднуються
трубопроводами з ГП.
9. 286
Рисунок 2.89. Гідроциліндр:
1 – корпус; 2 – поршень за штоком; 3 – кришка
При формуванні на виході ГП витрати рідини при навантаженні у ГВД
надходить потік робочої рідини навант
Q
. Різницевий тиск P
, що виникає
при цьому у порожнинах гідроциліндра, сприяє формуванню сили п
F , що
переміщує поршень і шток зі швидкістю п
V :
п
п
навант V
F
P
Q
Зміна знака навант
Q
забезпечує реверс виконавчого двигуна.
Різницевий тиск у порожнинах гідроциліндра залежить від параметрів
двигуна та витрати робочої рідини, що надходить з ГП:
v
Q
Q
P
PcS
навант
0
навант / (2.15)
де навант
S – перерізи трубопроводів і штуцерів ГВД;
v
Q – витрата рідини з-під поршня, що рухається.
Витрата v
Q визначається швидкістю п
V переміщення поршня
двигуна:
п
пV
S
Q
, (2.16)
Δp
ΔQнав
ΔQнав
Sнав Sнав
Vп
P1 P2
1 2 3
ΔP
10. 287
де п
S – площа поршня.
На поршень діє сила, пропорційна різниці тисків у робочих
порожнинах ГВД:
p
S
F
п
п
(2.17)
Сила п
F долає інерційність Fj поршня і штока, тертя тр
F і можливі
опори переміщенню y
F :
п
тр F
F
F
F у
j
Розкриваючи значення складових сили п
F , маємо:
y
F
F
V
f
dt
dV
m
п
п
лін
п
п
/ , (2.18)
де п
m – маса поршня і штока;
лін
f – коефіцієнт в’язкого тертя при лінійному переміщенні поршня.
Переходячи до операторної форми запису рівняння (2.18), беручи до
уваги (2.15)–(2.17), отримуємо систему рівнянь, що описує рух поршня
гідроциліндра:
)
(
)
1
(
/
п
д
a
д
п
п
p
п
0
навант
0
навант
y
v
F
F
k
V
p
T
P
S
F
V
S
Q
Q
Q
P
PcS
(2.19)
де д лін
1/
k f
– статичний передавальний коефіцієнт двигуна;
д п лін
/
T m f
– стала часу двигуна.
Перетворимо рівняння (2.19) до системи передавальних функцій:
11. 288
);
1
(
/
)
(
;
/
)
(
;
/
)
(
;
/
1
/
/
)
(
д
д
п
п
4
м
п
п
3
e
п
п
2
д
навант
0
1
p
T
k
F
V
p
W
k
S
P
F
p
W
k
S
V
Q
p
W
G
cS
P
Q
P
p
W
(2.20)
де д
G – провідність ГВД, а e
k , м
k – статичні передавальні коефіцієнти.
Система (2.20) дозволяє побудувати структурну схему гідроциліндра,
яка наведена на рис. 2.90.
Рисунок 2.90. Структурна схема гідродвигуна
Структурна схема гідродвигуна зворотно-поступального руху
адекватна схемі електричного двигуна постійного струму незалежного
збудження (рис. 2.79). Побудування характеристик гідроциліндра та їх
аналіз можуть бути виконані за аналогією з електричними двигунами.
Гідроциліндри БТОТ виготовляються на робочі тиски до 50–100 МПа.
Їх використання пояснюється можливістю забезпечення широких діапазонів
регулювання швидкостей, економічністю, простотою конструкції.
Аксіальний роторно-поршневий гідродвигун
Основи конструкції аксіального роторно-поршневого (АРП)
гідродвигуна наведені на рис. 2.91. Такі двигуни застосовуються у
стабілізаторах башти, наприклад 2Е26, 2Е28. Вони складаються з тих самих
елементів, що і гідравлічні об’ємні підсилювачі. Відмінність полягає лише
ΔQнавант ΔQ
Qv
ΔP
Mп Ωд
Vп
Mу
kм
kс
Fп
12. 289
T
γд
ΔQнав
ΔQнав
Sнав
Sнав
γд
Ωд
F
P1
M
T
T'
N'
D
d
в тому, що опорна шайба, з якою зв’язані штоки поршнів, має фіксований
кут нахилу γд відносно блока циліндрів.
Рисунок 2.91. Аксіальний роторно-поршневий гідродвигун (Т-64Б)
Вхідним сигналом ГВД є потік навант
Q
робочої рідини, який
надходить під поршнем; вихідним – частота обертання вала двигуна Ωд.
Схема перетворення сигналу входу аналогічна схемі, розглянутій для
гідроциліндра:
д
п
навант
F
P
Q
Робота АРП гідродвигуна, відповідна система рівнянь та передавальні
функції наведені у [ ].
Радіальний роторно-поршневий (РРП) гідродвигун
РРП гідродвигун (рис. 2.92) складається зі статора і ротора,
розташованих ексцентрично один до одного. На схемі величина
ексцентриситету позначена ρ. У роторі радіально розміщені робочі циліндри
з поршнями. Останні через штоки спираються на внутрішню поверхню
13. 290
l
l
α
Sнагр
α
ρ
Op
Oc
B ρ
A
β
F
N
T
A
Rc
c
Rp
p
O
o
ρ
ρ1
Sнавант
ΔQнавант
ΔQнавант
β
статора. З метою одержання плавного ходу ротора кількості циліндрів
(поршнів) виконують рівним 5, 7, 9 і більше. Розподільник на осі ротора,
забезпечує розподіл робочої рідини між циліндрами з порожнини
нагнітання та її відведення з-під поршнів у відвідну порожнину.
Рисунок 2.92. Радіальний роторно-поршневий гідро двигун
Схема формування вихідного сигналу РРП гідродвигуна ідентична
схемі, розглянутій для АРП ГВД:
навант д д.
Q p F
Його робота описується системою диференціальних рівнянь та
передавальними функціями у [ ].
РРП гідродвигуни забезпечують великі кратності регулювання
частоти обертання ротора 1000
k , підтримуючи стійке рівномірне
обертання з частотами менше 0,01–0,02с–1
. До недоліків слід віднести
конструктивну і технологічну складність. Але, позитивні якості у
14. 291
сполученні з великими обертальними моментами дозволили широко
використовувати РРП ГВД як виконавчі двигуни систем стабілізації
танкових башт.
Таким чином, усі розглянуті ГВД, незважаючи на їх конструктивні
відмінності, мають єдину структурну схему, а отже, й однотипні статичні та
динамічні властивості.
Таблиця 2.2 Параметри структурних схем гідродвигунів
Типи
ГД
Передавальні коефіцієнти
д
G м
k д
k д
T е
k
ГЦ
0
навант
P
cS п
S
лін
1
f
п
лін
m
f
п
S z
РРП
0
навант
P
cS п
S z
1
f
д
J
f
п
V z
АРП
0
навант
P
cS п н
γ
2
S zD
1
f
д
J
f
п
V z
2.5.5. Дросельний електрогідропривід
Дросельний електрогідравлічний привід (ЕГПр) (рис. 2.93)
складається з електромагніта управління ЕМ, гідравлічного підсилювача
ГП, насоса Н постійної продуктивності з порожниною злива та ГВД.
За відсутності сигналу управління коромисло електромагніту
центрується у нейтральному положенні пружинами П.
15. 292
Рисунок 2.93. Електрогідропривід дросельного типу
Принцип роботи привода розкриває логічний ланцюжок, на рисунку
2.94.
Рисунок 2.94. Принцип роботи дросельного електрогідропривода
Вхідним сигналом ЕГПр є напруга у
U , що підводиться до обмотки
електромагніта. Під дією у
U по обмотці ЕМ протікає струм іем, що
забезпечує формування моменту М електромагніта, прикладеного до
коромисла. Останнє, повертаючись на кут αкр, діє на голки ГП, переміщуючи
їх на довжину h
і забезпечуючи тим самим зміну прохідних перерізів S
дроселів. Витрати рідини через них змінюються, викликаючи появу витрати
навант
Q
навантаження. Це, у свою чергу, приведе до виникнення різниці
тисків н
в Р
Р
P
у порожнинах (верхній та нижній) гідроциліндра. Сила
п
F , що виникає на поршні, забезпечить переміщення штока зі швидкістю д
V
Р1
Р2
ГВД
ЕМ
ГП
П
Н
Qврн
Ω0
lкр
Uy
lем
αкр
Sп
Fп=∆P Sп
Мем
Δh
Fп
ΔP
ΔQнавант
-MП
-Mр
Mем
iем
Uу αкр Δh(Δs) VД
16. 293
. Пропорційність між сигналом управління у
U та регульованою величиною
д
V забезпечується введенням жорсткого від’ємного ЗЗ за кутом повороту
коромисла, що реалізується за допомогою пружин П, момент п
M пружин
діє зустрічно моменту М електромагніта. Цю ж роль виконує внутрішній
від’ємний ЗЗ на голки ГП – тиск P
, що зростає при зменшенні перерізу
дроселів, приводить до збільшення моменту p
M протидії магніту.
2.5.6. Об’ємний електрогідропривід
Основними елементами ЕГПр об’ємного типу (рис. 2.95) є:
електромагніт управління ЕМ, колиска Кл, гідравлічний підсилювач ГП,
радіальний роторно-поршневий гідродвигун ГВД.
Схема роботи привода багато в чому аналогічна розглянутій раніше
для дросельного типу ЕГПр.
Рисунок 2.95. Електрогідропривід об’ємного типу:
Коли момент М = 0, колиска центрується пружинами П. Напруга у
U –
вхідний сигнал – подається на ЕМ. Останній формує момент М,
пропорційний струму і в його обмотці. Під дією моменту електромагніта
колиска повертається на кут γ, забезпечуючи зворотно-поступальний рух
17. 294
поршнів ГП, що живить робочою рідиною навант
Q
гідродвигун. Різницевий
тиск P
, що виникає у порожнинах нагнітання та відведення робочої рідини
двигуна, сприяє формуванню моменту д
M , що розвивається ним, а отже, і
частоти обертання д
його ротора.
Рисунок 2.96. Принцип роботи об’ємного електрогідропривода
Центрувальні пружини П забезпечують жорсткий від’ємний ЗЗ за
кутом повороту колиски. Він призначений так само, як і в ЕГПр
дросельного типу, для забезпечення пропорційності регульованої величини
сигналу управління. Поліпшення характеристик досягається введенням
жорсткого від’ємного ЗЗ за тиском у системі, що реалізується за
допомогою плунжера Пл зворотного зв’язку, завдяки наявності якого
зменшується збурювальний момент, зумовлений параметрами самого
привода.
На практиці часто в якості пристроїв управління об’ємного ЕГПр
застосовуються приводи дросельного типу, тобто АГП можуть складатись
з двох і більше каскадів. Це дозволяє отримувати великі коефіцієнти
підсилення, полегшує управління об’єктами з високою інерційністю,
наприклад, баштами танків. Швидкодія таких багатокаскадних ЕГПр
об’ємного регулювання майже на порядок нижче, ніж у рівних їм за
потужністю ЕГПр дросельного типу. Тому для малих і середніх
потужностей дросельні ЕГПр більш придатні. Переваги об’ємних ЕГПр
повною мірою виявляються при потужностях понад 3–5кВт.
МД
ΔP
ΔQнав
-MП
-Mр
M
iем
Uу γ ΩД
18. 295
2.5.7. Структурний аналіз електрогідравлічних виконавчих
приводів
Однотипність схем перетворення сигналів управління
електрогідравлічними ВПр дросельного та об’ємного регулювання дозволяє
провести структурний аналіз типового привода незалежно від його
конструктивного виконання.
Вхідною ланкою ЕГПр є електромагніт, який управляє в одному
випадку коромислом, а в іншому – колискою.
Підключення обмотки ЕМ під напругу у
U приводить до появи струму
i :
у
U
iR
dt
di
L
ем
ем
/ (2.21)
де ем
L , ем
R – індуктивність та активний опір обмотки ЕМ.
Під дією струму і формується момент, що розвивається магнітом:
i
k
i
Ф
C
M з
M ем
(2.22)
де м
C – стала ЕМ; з
– магнітний потік збудження; ем
k – статичний
передавальний коефіцієнт ЕМ.
Обертальному моменту ЕМ протидіють момент інерції Мj коромисла
та зв’язаних з ним частин, момент тертя Мтр у його (її) опорах, моменти
центрувальних пружин Мп та протитиску Мр, інші моменти Мзб збурення.
Розкриваючи значення кожної зі складових, маємо:
M
p
k
M
p
l
S
k
h
l
C
M
dt
d
f
dt
d
J зб
кр
гол
п
кр
п
кр
кр
2
кр
2
кр
, (2.23)
19. 296
де кр
J – момент інерції коромисла та зв’язаних з ним частин; кр
f –
коефіцієнт в’язкого тертя в опорах коромисла (колиски); кр
α – кут повороту
коромисла (для колиски γкол); п
С – жорсткість пружин; кр
l – плече
коромисла; гол
S – площа перерізу голок дроселів (плунжерів зворотного
зв’язку).
Перетворення кута повороту коромисла у лінійне переміщення голок
(плунжерів) виразимо рівнянням
кр кр
α .
h l
(2.24)
Система рівнянь (2.21)–(2.24) описує рух електромагніту та
коромисла. Переходячи до операторної форми запису зазначених рівнянь,
одержуємо відповідні їм передавальні функції:
1
1
/
1
)
(
м
ем
м
е
1
p
T
k
p
R
L
R
U
i
p
W
i
i
е
у
; ем
2 )
( k
Ф
C
i
M
p
W з
м
;
(2.25)
p
p
k
p
p
f
J
f
/
М
)
p
(
W
кр
кр
кр 1
1
T
1
1
1
кол
кол
3
; х
k
l
h
)
p
(
W
кр
кр
4
Об’єднуючи структурні зображення (2.25) диференціальних рівнянь
ЕМ та коромисла, ГП і ГВД (див. рис. 2.87, 2.90) відповідно до схем
перетворення сигналів у ЕГПр, отримуємо структурну схему ЕГПр (рис.
2.97).
20. 297
Рисунок 2.97. Структурна схема ЕГПр
Визначимо еквівалентну передавальну функцію контуру І:
2
кол кол кол
І 2 2
кол п кол кол кол п
/( )
( ) .
1 /( )
x x
x x
k k T p p k k
W p
k k k T p p T p p k k k
Контур IV замінимо його динамічною ланкою з передавальною
функцією:
д
IV
ГП д д ГП
1/ 1 1
( ) .
1 /
G
W p
G G G G G
Після перенесення суматора І на місце суматора 2 (див. за стрілкою),
знаходимо передавальну функцію контуру ІІ:
2
кол кол п
ІI 2
I ГП кол кол п кол ГП
1/
( ) .
1 ( ) / ( )
x
p x x p
G T p p k k k
W p
k W p k G G T p p k k k k k k k
Приведемо дію зовнішнього збурення Ωосн (Vосн) до суматора 3:
21. 298
2
е м кол кол п
осн е II м осн 2
кол кол п кол ГП
( )
( ) .
( )
x
у
x x p
k k T p p k k k
M k W p k
G T p p k k k k k k k
Продовжуючи перетворення, перенесемо суматор 2 на місце суматора
3 та визначимо передавальну функцію контуру ІІІ:
0
1
2
2
3
3
гп
кол
д
п
кол
2
кол
1
1
1
а
p
a
p
a
p
a
k
k
k
k
)
k
k
k
p
p
T
(
G
k
р
Т
/
)
р
(
W
k
е
k
k
)
р
Т
(
k
)
p
(
W х
х
Д
Д
П
М
Д
Д
Д
П
де
3 кол д
а T Т C
; 2 д кол кол д е м
( ) ;
а T T C T k k k
1 д кол п ГП д е м
( ) ;
x p
а T k k C k k k С k k k
п
гп
п
кол
0 k
k
е
k
k
k
k
k
C
(
k
k
a М
Д
p
х
.
Після перемноження передавальних функцій прямого кола,
вважаючи, що 1
i
T , отримуємо еквівалентну структурну схему ЕГПр
(рис. 2.98). Параметри схеми для конкретних конструкцій приводів наведені
у табл. 2.3.
Встановимо залежність між регульованою величиною Ωосн (Vосн),
сигналами управління y
U та зовнішніх збурень
y
M . Для цього визначимо
передавальні функції привода за сигналом управління:
0
1
2
3
3
д
м
гп
кол
ем
п
д )
(
)
(
a
p
a
p
а
p
а
k
k
k
k
k
k
k
U
V
p
W
2
x
i
y
x
(2.26)
та зовнішнім впливом:
0
1
2
3
3
гп
кол
п
кол
2
кол
д
п
д
)
(
(
)
(
)
(
a
p
a
p
а
p
а
k
k
k
k
k
k
k
p
p
T
G
k
M
V
p
W
2
p
x
x
y
y
(2.27)
22. 299
Для усталених режимів роботи ЕГП вважаємо у рівняннях (2.26),
(2.27) оператор р = 0. На основі принципу суперпозиції маємо:
у
М
е
p
p
П
у
П
М
e
ГП
p
П
М
i
M
k
k
k
k
k
k
k
G
k
k
G
k
k
U
k
k
k
k
k
k
k
G
k
k
k
k
k
Ω
п
д
гп
П
гп
д
д
д
гп
ем
д (2.28)
Статичні характеристики, що відповідають рівнянню (2.28) руху
ЕГПр, наведені на рис. 2.97. При 0
y
M регулювальні характеристики
йдуть з початку координат. При 0
y
M привод має зону нечутливості,
характеристики зміщуються вздовж осі абсцис на значення напруги
рушання (початку руху) коромисла, пропорційну напрузі
y
M :
y
М
ГП
i
ГП
p
у M
k
k
k
k
k
k
k
G
k
k
U
д
ем
д
п
Рисунок 2.97. Регулювальні (а) та навантажувальні (б)
характеристики електрогідравлічного привода
ki, kем >ном
Uу
Ωд
Vд
MуΣ>0
MуΣ=0
1
2
3
Uу2> Uу1
UK2
Ω
д
Vд
MyΣ
ΔMу
ном
kP,G>но
м
kP, kE >ном
kP, kE,G >ном
но
м
23. 300
Рисунок 2.98. Еквівалентна структурна схема електрогідравлічного
привода
Таблиця 2.3. Параметри структурних схем електрогідроприводів
Зі збільшенням провідності G системи, жорсткості пружин
зворотного зв’язку п п кр
k C l
, діаметрів голок дроселів (плунжерів)
р гол кр
k S l
крутість регулювальних характеристик падає. Зменшення ж
опору обмотки електромагніта ем
/
1 R
ki та збільшення є його потужності
з
MФ
C
k
ем
підвищують крутість регулювальних характеристик, зменшують
зону нечутливості привода.
Жорсткість навантажувальних характеристик ЕГПр знаходимо згідно
з рівнянням (2.28):
к п ГП д е м п
д д п д ГП
( )
p
p
М G k k k k k k k
G
V k k G k k
. (2.29)
24. 301
Зі збільшенням площі поршня гідродвигуна або об’єму циліндрів
е п
k S
( п
V z ), із зростанням жорсткості пружин п п кр
k C l
жорсткість
привода у цілому також підвищується (див. рис. 2.97), він активніше
протидіє зовнішнім збуренням. Збільшення протитиску p
k , провідності
привода приводять до зниження його жорсткості.
Таким чином, під час експлуатації ГВПр у складі АСУО необхідно
слідкувати за їх технічним станом, турбуватись, аби у системі не було
повітря, а самі системи були заправлені рекомендованою робочою рідиною
(змінюються параметри ГП
k , G ) і в потрібній кількості. Слід звертати увагу
на справність кіл електроживлення (параметри i
k , i
T , ем
k ) та
гідромонтажного комплекту (параметри ГП
G , д
G ).
Усі ці заходи допоможуть підтримувати характеристики ЕГПр на
номінальному рівні.
2.5.8. Практичне схемо-конструктивне рішення гідроприводів у
системах танкового озброєння
Гідропривід гармати та спареного кулемета у вертикальній площині
є об’ємним електронасосним приводом та служить для зміни швидкості
переміщення гармати та кулемета у відповідності із сигналом управління. У
гідроприводі гармати малопотужний електричний сигнал управління
перетворюється у тиск та витрату робочої рідини. Він виготовлений за
схемою дросельного регулювання з розімкнутою циркуляцією рідини (див.
рис. 2.99). Робоча рідина до об’ємного гідроциліндру подається від
установки живлення. В якості насоса установки живлення застосовується
шестерний насос з приводом від електродвигуна постійного струму.
Дросельне регулювання тиску, витрати та напрямку руху робочої рідини
здійснюється шляхом зміни прохідного перерізу регулюючого гідроапарату
золотникового типу (гідропідсилювача). Гідропідсилювач розташований на
25. 302
гідроциліндрі. В схемі із розімкнутою циркуляцією робоча рідина від
гідроциліндра та гідро підсилювача по зливних гідролініях подається до
компенсатора установки живлення. Загальна кількість мастила, що
заправлене у гідропривід, складає 2,5 кг. Запас робочої рідини, необхідний
для нормальної роботи насоса, зосереджений в компенсаторі установки
живлення. Гідропривід стабілізатора вмикає установку живлення та
гідроциліндр. Обидва пристрої з’єднані між собою електрогідромонтажним
комплектом.
Гідроциліндр 1 є виконавчим органом гідроприводу. Він перетворює
енергію потоку рідини у механічну роботу з переміщення гармати та
спареного кулемета при стабілізації і наведенні, а також для гідростопоріння
гармати та кулемета н башту.
У сталевому корпусі 2 циліндру 1 розташований шток 3. Для
видалення повітря з порожнин поршня передбачені два попітряспускних
пристрої 4. Робоча площа поршня складає 15 см2
, робочий хід поршня ‒ 165(-
10)
мм, максимальний тиск рідини у робочих порожнинах складає 51,4 МПа.
До корпусу циліндра кріпиться головка циліндра. Головка циліндра є
електрогідравлічним розподільником потоку робочої рідини.
Вона забезпечує підвід рідини до циліндра, запобігає перевантаження
гідроприводу при підвищених тисках та поповнює об’єм робочої рідини в
порожнинах гідроциліндра.
До корпусу головки гідроциліндра з одного боку прикріплено два
електромагніта 36 гідростопоріння, а з іншого ‒ механізм управління 11.
Механізм управління закритий кришкою. В кришці є отвір для випуску
повітря.
Всередині корпусу розташовано стопорний пристрій. Стопорний
пристрій забезпечує постановку гармати на гідростопор. Пристрій
складається з двох однакових за побудовою двох гілок, одна з яких з’єднана
26. 303
з порожниною А, а друга ‒ з порожниною Б гідроциліндра. В кожній гілці є
корпус клапана 39, золотник 37, шарик та електромагніт.
Електромагніт постійного струму призначений для перетворення
електричного сигналу у поступальне переміщення золотника. Втягуюче
зусилля електромагніта на початку ходу якоря із золотником складає 3 кг,
утримуюче зусилля ‒ 3,5 кг.
Всередині корпуса знаходяться також два запобіжних клапани 32, що
працюють в режимі гідростопоріння, два запобіжних клапани 35, що
працюють в режимі стабілізації та наведенні для обмеження величини
робочого тиску та два підживлюючих клапани 33, що виключає зниження
тиску нижче певного рівня в гідролініях головки циліндра.
Запобіжні клапани розраховані на тиск 49±2,5 МПа (500±25 кгс/см2
),
запобіжні клапани ‒ на тиск більше 5,89 МПа (60 кгс/см2
).
Механізм управління являє собою пристрій, призначений для
управління потоком рідини між гідроциліндром та установкою живлення. В
корпусі механізма управління розташовані електромагніт та важіль 7. В
расточках корпусу розташовані два золотники 6 та 12. В кожному золотнику
є два осьових та одне радіальне свердлення. В одному осьовому свердленні
встановлені плунжери 5 або 13 зворотного зв’язку, а в другому ‒ шарики 8,
через які при роботі передається вплив від електромагніта до ричага.
Радіальне свердлення забезпечує підвид рідини до внутрішньої порожнини
золотника та плунжера зворотного зв’язку.
При подачі електричного сигналу на електромагніт 36 важіль,
заліплений на вісі ротора відхиляється в один чи інший бік, переміщуючи
відповідно золотники один вгору, а інший ‒ униз.
Золотники перерозподіляють потік рідини між робочими лініями та
лініями зливу гідроприводу.
Електромагніт є електромеханічним перетворювачем постійного
струму у електромагнітний момент та призначений для роботи в
27. 304
гідроприводі в якості управляючого пристрою. Обмотка збудження є
ротором та складається з двох котушок, що живляться при роботі струмом
борт мережі.
Статор електромагніту являє собою дві обмотки. Кожна обмотка
складається з двох котушок ‒ однієї низькоомної (величина опору складає
50±5 Ом) та однієї високоомної (величина опору складає 120±15 Ом).
Кут повороту якоря складає ±5°30´. При рівності струму в котушці
управління момент на вісі електромагніта дорівнює 0. При наявності різниці
струмів в котушках управління на валу якоря електромагніта утворюється
момент, величина та напрям якого визначається величиною та напрямом
різниці струмів в обмотках управління.
Установка живлення 16 (рис.2.99) призначення для перетворення
електричної енергії потоку робочої рідини. Вона складається з шестерного
насоса 17, електродвигуна 22МИ-2ТМ-3 та компенсатора 15.
В лінії нагнітання установки живлення розташовані два фільтри 19.
Фільтри призначені для очищення робочої рідини. При забрудненні фільтра
внаслідок підвищення тиску спрацьовує його перепускний клапан та рідина
до гідроциліндру подається неочищеною. Для заправки та зливу робочої
рідини призначений заправочний клапан 23. Для видалення повітря із
установки живлення при заправці системи та для забезпечення зливу рідини
маємо пробка випуску повітря.
Шестерний насос 17 перетворює механічну енергію в енергію потоку
робочої рідини. Максимальний тиск, що створює насос, складає 7,5 МПа
(75кгс/м2
), виробнича потужність – 7см3
/об. Насос 17 в дію приводиться від
електродвигуна МИ-2ІМ-3. Електродвигун є електричною машиною
постійного струму змішаного збудження. Для охолодження двигуна
використовується повітряний потік, що створює крильчатка вентилятора 21.
Напруга живлення електродвигуна складає 27В, потужність – 1кВт,
швидкість обертання вала двигуна дорівнює 3000±300 об/хв.
28. 305
Рисунок 2.99. Конструктивно-функціональна схема гідроприводу
стабілізатора гармати
Компенсатор 15 є порожниною для робочої рідини усього
гідроциліндру стабілізатора гармати та забезпечує відновлення витоку
робочої рідини із гідроприводу, а також компенсацію температурної зміни
обсягу цієї рідини. Він являє собою штампований, зварний корпус. Обсяг
компенсатора складає 2,8л, поверхня охолодження – 0,148м2
.
Для недопущення руйнування компенсатора тиском рідини при
підвищенні температури встановлено запобіжний пристрій. Він складається
з нерухомого поршня 26, розташованого в корпусі 27. Корпус 27
29. 306
закріплений у сильфоні 14. Поршень стиснутий пружиною 25 до кришки
24.
До нерухомої основи 31 сильфона кріпиться шкала мастилопоказчика
30. При підвищенні тиску рідини в компенсаторі, сильфон, стискаючись,
переміщує корпус 27. Разом з корпусом 27 відносно рисок шкали
мастилопоказчика пересувається планка 28 та поршень 26. При підході
поршня до упору 29 шкали його рух припиняється. Подальше стискання
сильфона призводить до переміщення корпуса відносно поршня. В момент
співпадання кільцевої проточки в корпусі з радіальним свердленням в
поршні до осьового свердлення поршня відбувається викид рідини до
атмосфери, що призводить до зниження тиску у порожнину компенсатора.
Робота гідропривода може бути проілюстрована наступною логічною
схемою
h
І
M
M
p
Q
М у
y
д
y
y
уж
д
Гідростопоріння гармати на башту здійснюється при її підході до
верхнього або нижнього упорів при плавному наведенні, при ударі гармати
об упори башти і відкиданні її зі швидкістю 7 - 8,5 град/с і більше, при
відкаті – накаті рухомих частин гармати після пострілу, при підході до кута
заряджання і на куті заряджання, при русі гармати зверху вниз зі швидкістю
вище 7 – 8,5 град/с після закінчення циклу заряджання, при порушенні
порядку включення і виключення стабілізатора.
h
І
M
M
p
Q
h
М у
y
д
y
u
к
г
0
0
При гідростопорінні гармати переміщення штока циліндра можливе
тільки при різких ударах танка на перешкодах, коли тиск в одній з порожнин
А або Б досягає величини 49±2,5 МПа (500±25 кг∙с/см2
).
30. 307
В цьому випадку спрацьовує один із запобіжних клапанів 2.1.2(1) або
2.1.2(2), перепускаючи рідину в порожнину головки циліндра. Час відкриття
зворотніх клапанів (кульок) складає не більше 0,02 с, а час закриття не
більше 0,4с.
2.5.8. Типова схема ЕГПр танків та його вмикання в робочий
стан
Типову електричну схему ЕГПр танків Т-64Б, Т-64БМ “Булат”
розглянемо на прикладі роботи принципової схеми (Додаток 2) ЕГПр
гармати та його складу, який входить в стабілізатор 2Е-42. Для роботи ЕГПр
в усіх штатних режимах роботи стабілізатора необхідні додаткові пристрої:
прилад приведення (ПП), обмежувач кутів (ОК), схема розвантаження
електродвигуна установки живлення (УЖ) при підході гармати до
максимальних кутів підвищення і зниження та схеми гідравлічного
стопоріння при відскоках гармати від упорів зі швидкостями більше 7,5-8,5
◦/с. Нижче покажемо загальну конструкцію та електричні схеми названих
пристроїв і систем.
Загальна будова та електрична схема приладу приведення
В приладі приведення (ПП) розташовується контактний пристрій,
який забезпечує необхідні перемикання кіл для приведення гармати до кута
заряджання і утримання її в цьому положенні в процесі заряджання. ПП
(рис. 2.100, а) виконується у вигляді литого корпусу із алюмінієвого сплаву,
котрий закривається затулкою. В середині корпусу встановлена плата із
електроізоляцій -
-ного пресматеріала з запресованими в ній трьома робочими і трьома
струмоз’ємними контактними кільцями І, ІІ, ІІІ у вигляді секторів і втулкою.
В отворі плати встановлена вісь на внутрішнім кільці якої закріплені три
колодки з рухомими контактами – щітками, а на зовнішньому – циліндрична
31. 308
подвійна шестерня. Шестерня знаходиться в постійному зачепленні з
сектором, котрий закріплений на коливаючій частині гармати. Передаточне
відношення від сектора гармати до шестерні i = 13,066. Через шестерню
відхилення гармати передається на щітки, кожний контакт яких ковзається
по своєму сектору. Сектор І (зовнішній) призначається для подачі сигналу
на приведення гармати на кут заряджання. Він має зону ізоляції, що
відповідає знаходженню гармати на куті заряджання. Сектор ІІ (середній)
служить для гальмування гармати при підході до кута заряджання і її
стопоріння на цьому куті. Сектор ІІІ (внутрішній) приєднується до корпуса
приладу приведення через 7,5 контакти Ш1 та з сектора ІІІ через рухомі
контакти подається корпус на середній та зовнішній сектори.
Рисунок 2.100. Загальна будова (а) та електрична схема (б) приладу
приведення
Сектори мають лепестки, до яких підпаяні провідники, що з’єднують
контактні кільця зі штепсельним роз’ємом Ш1. Електричний зв’язок ПП з
іншими пристроями стабілізатора здійснюється через Шр Ш1. Захист від
попадання в середину приладу вологи та пилу роз’ємне з’єднання
32. 309
захищенні ущільнюючими кільцями і сальником. Електрична принципова
схема ПП приведена на рис. 2.100, б.
Загальна будова та електрична схема обмежувача кутів
Обмежувач кутів (ОК) призначається для перемикання електричних
кіл, блокувань системи при підході гармати до граничних кутів підвищення
чи зниження і при відході від них. ОК уявляє собою електромеханічний
прилад важільного типу рис. 2.101, а. В корпусі приладу (3), що
закривається затулкою (2) розташовані чотири мікровимикачі (8). Останні
перемикаються упором валика (9) і підпружиненими важелями (4) при
підході гармати до граничних кутів. На зовнішньому кінці валика (5)
установлений важіль з роликом (6), на який діють один із двох упорів, що
закріпленні на коливальній частині гармати. Електричний зв’язок ОК з
іншими елементами системи здійснюється за допомогою штепсельного
роз’єму Ш1 (1) ( рис. 2.101, б). Обмежувач встановлюється з лівої сторони
гармати на кронштейні башти і кріпиться до нього чотирма гвинтами.
Рисунок 2.101. Загальна будова (а) та електрична схема (б)
обмежувача кутів
б)
а)
33. 310
Роль обмежувача кута при розвантаженні електродвигуна установки
живлення та при гідро стопорінні гармати при її відскоках від упорів
В ПДПС 1Г42 кут наведення лінії візирування перевищує кут
прокачки гармати. В цих випадках може оказатися, що гармата буде на
упорі, а лінія візирування знаходиться за упором. В цьому випадку на вхід
ФЧВ К1-У5-У2
Рисунок 2.102. Схема розвантаження електродвигуна установки
живлення приводу гармати
(зона Б 17) поступає сигнал неузгодження, який не відпрацьовується
стабілізатором гармати, а виконавчий двигун УЖ в цей час
перенавантажується. Щоб цього не проходило, в приводі стабілізатора
гармати передбачено його часткове розвантаження. При наведенні лінії
візирування за упори замикаються нормально-розімкнуті контакти ОГ-КН3
чи ОГ-КН4 обмежувача кута (рис. 2.102) і «корпус» через один із цих
контактів подається на реле К1-Бр2-Р3, а «+27В» подається від АЗР УП-ВН
ЩЛ через замкнені контакти К1-Р1 і запобіжник К1-Пр1. Контакти реле К1-
Р1 замикаються після виведення важеля перемикача черв’яка підйомного
34. 311
механізму гармати із положення «РУЧН» та спрацювання реле К1-Р1, на яке
+27В подається від ЩЛ «УП-ВН» через запобіжник К1-ПР2. Реле К1-Бр2-
Р3 спрацьовує і розмикає свій нормально-замкнений контакт БР2-Р3.
Напруга +27В на середню точку обмоток управління ЦВ – ОУІ і ЦВ-ОУІ’
подається через обмежуючі резистори К1-Бр2-R3,R10. В наслідок цього
зменшується різниця струмів в обмотках електромагніта управління ЦВ і
привідний двигун УЖ частково розвантажується.
Під час руху танка стабілізована гармата переміщується відносно
башти в вертикальній площині. При цьому можливі співудари з упорами
башти. При великій швидкості співударів гармата може бути відкинута
упором на значний кут і деякий час знаходитись в не стабілізованому
положенні. Для скорочення часу перебування гармати в не стабілізованому
положенні в приводі передбачено гідростопоріння гармати на башту при
наданні їй упорами гармати кутову швидкість ωГ більше 7-8,5 град.
Після співудару з верхнім упором замикаються нормально-розімкнуті
контакти обмежувача кутів ОГ-КН2 і контакт абсолютної швидкості (КАШ)
ГТ-ВН замикається. Плюсовий потенціал на реле Бр1-Р2 подається від ЩЛ
УП-ВН через запобіжник К1-Пр1.
Вмикання приводу вертикального наведення гармати
Вмикання приводу ВН здійснюється при увімкненому приводі ГН та
переводом рукоятки механічного підйомника гармати із положення РУЧН.
в положення СТАБ. При виводі із першого положення рукоятки замикається
контакт МО-КП2 (зона А12) і напруга бортмережі +27 В (зона А12) поступає
на контакти К1-Ш1/10,11 і далі через запобіжник К1-Пр2, діод К1-Д1 на
обмотку контактора К1-Р1/1,2 та реле К1-Р2/А,Б (зона А12).
Реле К1-Р1 спрацьовує. Нормально розімкнуті контакти К1-
Р1/21,41;22,42 (зона А12) замикаються і подають напругу бортмережі
+27 В:
35. 312
- через контакти К1-Ш4/10,11 на запуск приводного двигуна
установки живлення УЖ-ПД і на обмотку збурення ЦВ-ОЗ (зона А12);
- на плавку вставку К1-Пр1 (зона А12).
Через плавку вставку К1-Пр1 напруга +27 В поступає:
- через контакт К1-Ш3/31 на сердню точку контактів обмежувача
гармати ОГ-Кн1 і ОГ-Кн2 (зона А13);
- через контакт К1-Ш6/3а на обмотку реле К1-БР1-Р8/А.Б (зона А13);
- на імпульсний підсилювач К1-У4 (зона Б12);
- на інтегратор К1-У1 (зона А15);
- через НЗ контактори реле К1-Р2/5,6 (зона А13) на середню точку
іскрогасильного контуру, який склається з резистора К1-БР2-R1,R2 та діодів
К1-БР2-Д1, Д2 (зона Б12), на обмотки реле К1- БР2-Р2/А,Б (зона А13) і через
НЗ контакти К1-БР2-Р3/1,2 на середню точку обмотки управління циліндра
ЦВ-ОУІ, ЦВ-ОУІ/
(зона Б11).
Реле К1-Р2 через НЗ контакт К1-БР2-Р1/1,2 (зона А12) спрацьовує. НВ
контакт К1-Р2/2,1 (зона А11) замикається, напруга +27 В через плавку
вставку К1-Пр2 подається на обмотку електромагниту гідростопоріння ЦВ-
ЕмІ, Ем2 (зона А11). Гармата стає на гідростопор. НЗ контакт К1-Р2/6,5
(зона А13) розмикається і напруга +27 В відключається від середньої точки
ЦВ-ОУІ, ЦВ-ОУІ' (зона Б11).
Таким чином, при розгоні приводного двигуна під час переводу
рукоятки механічного підйомника з положення РУЧН в положення СТАБ
гармата знаходиться на гідростопорі.
Переводом рукоятки замикається контакт МО-КП1 (зона А12) і
відбувається розчеплення гармати від механічного підйомника. Напруга
бортмережі +27 В поступає на обмотку реле К1-БР1-Р1/А, Б (зона А11) через
замкнуті при вмиканні приводу ГН контакти К1-БР1-Р9/5, 6. Реле
спрацьовує.
36. 313
НЗ контакт К1-БР1-Р1/2,1 вимикає обмотку реле К1-Р2/А, Б (зона
А12) від “корпуса”. НВ контакт К1-Р2/2,1 (зона А11) занімає вихідне
положення, гармата знимається з гідростопору. НЗ контакт К1-Р2/6, 5 теж
займає вихідне положення, і напруга +27 В подається на середню точку ЦВ-
ОУІ,
ЦИ-ОУІ/
. Одночасно НЗ контат К1-БР1-Р1/4, 5 розмикається та снімає
напругу +27 В з резистору К1-У1-R10, вмикається статичний інтегратор.
Привод ВН готовий до роботи.