
Recommended
More Related Content
Similar to Основная часть курсового проекта по электрооборудованию
Similar to Основная часть курсового проекта по электрооборудованию (14)
Основная часть курсового проекта по электрооборудованию
- 1. 1. Загальна частина 1.1. Опис технологічного процесу цеху Для виконання вантажно-розвантажувальних робіт, транспортування вантажів по цеху, використовують мостові крани вантажопідйомністю від 5 до 30 тон, вантажні лебідки, електричні талі. На території дробарно- транспортного цеху № 2 ПівнГЗКа знаходяться споживачі ІІІ та ІІ категорій, безперебійне живлення яких необхідне для надійної роботи електрообладнання. Обладнання крана стандартизоване, укомплектоване типовим електрообладнанням, яке випускається серійно. Схема керування краном пов’язана з специфікою відповідного цеху підприємства і призначенням крана. До електрообладнання крана висуваються певні вимоги: забезпечення високої продуктивності, надійність праці, безпечність обслуговування, простота експлуатації, ремонту тощо.
- 2. 1.2. Технічна характеристика, устрій і робота проектуємого крану Вигляд мостовогокрана в основному визначається специфікою цеху та його технологією, однак більшість вузлів кранового устаткування, наприклад механізми підйому та пересування, виконуються однотипними для різних видів кранів. На мал.1.1 показаний загальний вид проектуємого крану. Несуча зварювана конструкція крана являє собою міст з двома головними балками 25 коробчатого перерізу, перекинутими через проліт цеха та кінцевими балками 2 та 13, на яких встановлені ходові колеса 15. Колеса пересуваються по рейкам 16 підкранового шляху, закріпленим на балках опорних конструкцій 1 у верхній частині цеху. Привід ходових коліс здійснюється від електродвигуна 19 через редуктор 14 та трансмісійний вал 18. Уздовж моста прокладені рейки 20, по яким на колесах 12, що обертаються електродвигуном 9, через редуктор 10, пересувається візок 5 з підйомною лебідкою. На барабан 6 лебідки намотуються підйомні канати 24 з підвішеним до них на блоках 22 крюком 13 для захвату вантажів. Барабан приводиться в обертання електродвигуном 7 через редуктор 8. Керування роботою механізмів крана здійснюється з кабіни 27 оператора-кранівника, в якій встановлені контролери або командо- контролери 26 – органи ручного керування електроприводами механізмів. Електроапаратура керування електроприводами розташовується у шафах 4, встановлених на мосту крана. Тут також розташовані шухляди резисторів 21. Для проведення операцій обслуговування механізмів та електрообладнання передбачений вихід на міст з кабіни через люк 3. Електроенергія до крану підводиться за допомогою ковзаючих струмоз’ємників від головних тролеїв 17, покладених уздовж підкранового шляху. Для підводу живлення до електрообладнання, розташованого на візку 5, служать допоміжні тролеї 11, розташовані уздовж моста.
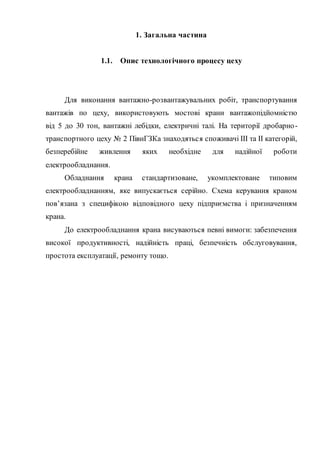
- 3. У всіх видів кранів основнимимеханізмами для пересування вантажів є підйомні лебідки та механізми пересування. Мал. 1.1. Загальний вид мостових кранів а) – однобалковий; б) – двобалковий; 1 – кінцева балка; 2 – головна поздовжня балка (міст); 3 – тельфер; 4 – візок; 5 – підкранові рейки; 6 – кабіна керування
- 4. Це дозволяє виділити ряд загальних питань електроприводу кранів: розрахунок статичних навантажень, вибір двигунів за потужністю, аналіз режимів роботи та інші. На мал. 1.2 зображена кінематична схема механізму пересування. Так як двигуни звичайно мають кутову швидкість значно більшу, ніж швидкість підйомного барабану або ходових коліс моста (візка), то рух до робочих органів механізмів крана передається через редуктори. Візок, зазвичай, має чотири ходових колеса. Два з них з’єднані валом приводяться до руху через редуктор від двигуна. Так як на кранах застосовується багатодвигунний привід та двигуни через передачі пов’язаними механізмами підйому або пересування, то вони як і інші елементи електроустаткування кранів роблять також у повторно- короткочасному режимі при значному числі ввімкнень на годину. Мал. 1.2. Кінематична схема механізму підйому
- 5. Р1 Р2 Г1 Г2 Д1 Д2 Кінематична схема механізму пересування мостового крана На кранах застосовуєтьсяелектрообладнання на 220 або 380 В змінного струму та 220 або 440 В постійного струму. Для захисту живлячих проводів та електродвигунів від струмів к.з. та значних перевантажень, на кранах передбачається максимальний струмів захист за допомогою реле
- 6. максимального струму або автоматичних вимикачів. Плавкі запобіжники використовують тільки для захисту ланцюгів керування. Тепловий захист на кранах звичайно не застосовується, тому що в умовах повторно- короткочасного режиму роботи двигунів вона може приводити до помилкового відключення. Для запобігання само запуску двигунів в електричних схемах кранів використовують сумісно з “нульовим” захистом блокування нульової позиції контролерів. Обов’язковим є наявність кінцевих вимикачів для автоматичної зупинки механізмів при підході їх до крайніх положень. Для безпеки обслуговування електрообладнання люк для виходу з кабіни на міст постачання кінцевим вимикачем, знімаючим напругу з допоміжних тролеїв при відчинені люка. Усі струмоведучі частини в кабіні крана повністю огороджуються. Механізми кранів оснащаються гальмами замикаючого типу з електромагнітами, які розгальмовують автоматично механізм при ввімкненні та загальмовують його при відключенні двигуна. Металоконструкції кранів і усі металеві частини електрообладнання, які можуть опинитись під напругою через псування ізоляції повинні бути заземлені. З’єднання з контуром заземлення цеху здійснюється через підкранові шляхи. Підйомний кран-машина призначена для здійснення підйому та пересування в горизонтальному напрямку штучних і масових вантажів на порівняно невеликі відстані в межах цеху. Підйомні крани складають особливу групу вантажопідйомних машин, яка характеризуються повторно короткочасним режимом праці. Підйомний кран обов’язково має наступні елементи: металеву конструкцію у вигляді моста, головний механізм підйому у вигляді лебідки, пристрій для захоплення і підвісу вантажу – крюки, підтримуючі і направляючі елементи – канати та цепні блоки, які направляють втулки, планки.
- 7. Лебідка підйомного крану має один барабан, що приводиться в дію від одного загального двигуна. В дипломному проекті розглядається цеховий підйомний кран, встановлений в приміщенні виробничого цеху і призначений для механізації вантажних і навантажувально-розвантажувальних робіт, пов’язаних з технологічним процесом. Мостовий підйомний кран має механізм підйому пересування моста і пересування вантажного візка. Підйомний механізм крана оснащений двома крюками, які за допомогою траверси і канатів підчеплені до двох барабанів головного вантажного візка. Будь-який з барабанів може обертатися через редуктор від окремого електродвигуна. Мостовий підйомний кран складається з моста, який перекриває проліт цеха і вантажного візка з механізмом підйому і пересування. Міст пересувається по підкрановим рейкам, встановленим на підкранових балках цехових споруд, а вантажний візок – по рейках моста крана. Кран цього типу обслуговуєвсю площу цеху і може пересувати вантажі в будь-якому напрямку відповідно до технологічного процесу. Живлення моста і візка крана електричним струмом здійснюється від струмоведучих тролей. Керування здійснюється за допомогоюмагнітного контролера з кабіни. Мостовий кран виготовлений вантажопідйомністю 30 т. Швидкість підйому крюка 25 м/С. Крюковий кран має міст, що складається із з’єднаних між собою головних та кінцевих балок.
- 8. 1.3. Вибір системи електроприводу Вибираємо систему керування електроприводами змінного струму. Для електроприводів механізмів пересування кранів застосовуються схеми керування з магнітними контролерами. Розглянемо схему керування електроприводом механізму пересування з магнітним контролером типу К-63. Схема виконана симетричною для обох спрямувань руху. Число фіксованих положень в кожну сторону – чотири. Схема забезпечує автоматичний пуск, реверс, гальмування та ступеневе регулювання швидкості шляхом змінювання опору резисторів у роторному ланцюгу. Розгін у напрямку “Вперед” та “Назад” виконується в три ступені за допомогою контакторів К6, К7 та К8. Для забезпечення нормального пуску в схемі передбачені невимикаємі ступені резисторів в ланцюзі ротора. При переведенні рукоятки командоконтролера з нульового положення у перше здійснюється затримка на час спрацювання реле противвімкнення КV2. Подальший розгін відбувається під контролем реле КТ1 та КТ2, причому реле КТ1 забезпечує перехід на характеристики, що відповідають третьому та четвертому положенням командоконтролера. Діапазон витримок часу цих реле (при відпаданні якоря) визначаючих інтенсивність прискорення 0,4-2,5 С. Схема допускає вільний вибіг (при нульовому положенні командоконтролера) або гальмування за допомогою механічного гальма з електромагнітом. Для зупинки механізму за схемою з вільним вибігом перемикають командоконтролер на протилежне спрямування шляху. При цьому незалежно від положення його рукоятки, збирається схема, що відповідає першому положенню та відбувається гальмування в режимі противвімкнення. При швидкості близької до нуля, реле противвімкнення відключає електродвигун, діючи на ланцюг котушки контакторів направлення. Після зупинки механізму можливий розгін його в протилежному напрямку. У процесі оперативного гальмування механічний
- 9. гальм не приймає участі. Для здійснення гальмування противвімкнення на котушку реле подається різниця випрямлених напруг: постійного – від незалежного джерела, що живить ланцюг керування; змінного – від ротора. Реле спрацьовує коли напруга перевищує визначаючу величину напруги, тобто при значеннях ковзання від 1,0 до номінального при пуску та від 1,3 до 1,0 в режимі гальмування проти ввімкненням, яке дозволяє здійснити плавну зупинку кранового механізму. Механічне гальмування здійснюється тільки при аварійних ситуаціях, коли спрацьовує будь-яка із захисту – максимальна, кінцева, нульова або відключає установку натисненням на кнопку аварійного вимкнення. Для одержання схеми без вільного вибігу із застосуванням механічного гальмування електромагнітом змінного струму слід виконати наступні переключення в схемі: гальмівний електромагніт змінного струму приєднати безпосередньодо виводів обмотки статора; відключити котушки контакторів керування гальмами; зашунтувати контакти кінцевих вимикачів розмикаючи ми контактами контакторів направлення, від’єднавши розмикаючий контакт. 1.4. Монтаж, експлуатація і ремонт проектуємого електрообладнання Раціональні способи експлуатацій та ремонту кранового електрообладнання дозволяють в значній мірі забезпечити безперебійну та довговічну роботу кранів металургійних цехів. Раціональна організація системи планово-попереджувальних ремонтів кранового електроустаткування є кращим способом забезпечення його виробничої та безаварійної роботи. Несправності в роботі електродвигунів виникають в результаті тривалої роботибез ремонту, незадовільного обслуговування або порушення встановлених режимів роботи. Причини несправностей можуть бути зовнішні, що не потребують ремонту електродвигуна, та внутрішні, які потребують його ремонту. До числа зовнішніх причин відносяться: відрив
- 10. одного чи декількох проводів живлячої мережі; перевантаження електродвигуна; перегорання запобіжників тощо. Крім того, причини несправності поділяються на електричні, магнітні, механічні. До електричних причин відносять: пробій ізоляції обмотування та ін. До магнітних причин відносять: ослаблення пре совки листів сталі; замикання між ними та ін. До механічних причин відносять: несправності підшипників; несправності бандажів; биття колектора або кілець; викривлення або поломка валу та ін. Однією з найбільш розповсюджених несправностей асинхронних електродвигунів є пошкодження обмоток. Виткові замикання в котушці, короткі замикання в обмотках , замикання обмотки на корпус є, як правило, наслідком розпайок місць з’єднання або механічного псування обмотки малого перерізу. Зовнішніми ознаками короткого замикання в обмотці можуть бути: ненормальне гудіння електродвигуна, неоднакова величина струмів в ланцюгах фаз, ускладнений пуск, перегрів котушок, обмоток. В залежності від характеру ушкоджень застосовують різні способи їх усунення. Так, наприклад, обрив або поганий контакт в обмотці може бути усунений перепайкою обмотки в зазначених місцях. Якщо обрив трапився в самому провіднику, то стержень або секцію замінюють новими. Якщо обрив є в лобовій частині обмотки, то в деяких випадках можливе усунення дефекту без заміни секцій. Найважливішим для кранового електроприводу є апаратура керування та захисту. Її несправність призводить до простою кранових механізмів. Однією з ознак несправності контакторів змінного струму є їх сильне гудіння, що часто супроводжується деренчанням. Можливими причинами цього є: лопнув короткозамкнений виток на магніто проводі; погано заткнуті вінти, які кріплять якір та сердечник; дуже велике тиснення контактів та ін. Ці причини несправності електромагнітних контакторів можуть бути виявлені шляхом уважного зовнішнього огляду. Якщо вони відсутні, тоді перевіряють справність котушки контактора. Споживання котушкою
- 11. підвищеної потужності свідчить про наявність в ній замкнених на коротко витків, а котушку слід замінити. Найбільш частими несправностями авто вимикачів є обгорання та спрацювання контактів; порушення їх регулювання та механізмів вимикання; послаблення пружин. Для доступу до контактів знімають з них дугогасильні камери. Нарости та виїмки на поверхні контактів усувають обпилюванням. Не допускається зачищення контактів скляним або наждачним папером через збільшення перехідного опору. Періодичний огляд і ремонт гальмівних електромагнітів проводять одночасно з оглядом та ремонтом механічної частини гальм. Періодичність проведення цих операцій залежить від режиму роботи кранових механізмів. Для більшої експлуатації кранові електродвигуни підлягають випробуванням. Випробування електродвигунів поділяються на: Профілактичні – для попередження ненормальних спрацювань та ушкоджень; Браковочні – для визначення технічного стану окремих частин електродвигуна перед ремонтом та уточнення обсягу майбутніх ремонтних робіт; Контрольні – для встановлення відповідного випускає мого після ремонту електродвигуна паспортним даним, технічним умовам на ремонт, стандартам тощо; Спеціальні – за спеціальною програмою при необхідності визначення параметрів електродвигуна. Випробування електродвигунів кранової та металургійної серій приводять відповідно з діючими ГОСТ 184-71, 11828-66 та ТУ6-513.461-78.