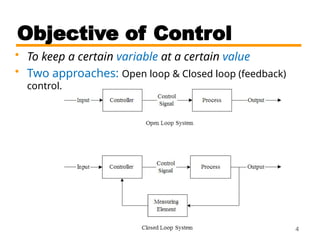
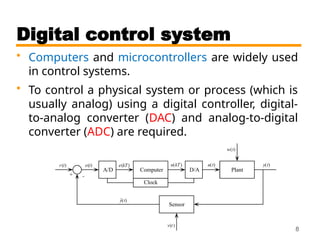
This document outlines the digital control course CSE 421, covering topics such as linear discrete systems, sampling, and digital control systems. It emphasizes the differences between open-loop and closed-loop control, and discusses the use of digital controllers, including the necessity of analog-to-digital and digital-to-analog converters. The material also highlights advantages of digital control, including ease of modification, cost-effectiveness, and the ability to manage complex multivariable systems.