2
五十嵐 祐貴 (いがらしゆうき)
• 東北大学工学部情報知能システム総合学科卒業
• 東北大学大学院情報科学研究科 M1
• 篠原・吉仲研究室
o 文字列(特にパターンマッチング)の研究
• アルバイト・インターンなど
o Preferred Networks (2016/6~現在)
o SmartNews (2014/8~2014/9)
o 乾・岡崎研究室 (2013/4~2016/3)
http://vbcpp.net/about
3.
3
趣味・興味
• .NET Technologies
o.NET/Visual Studioに興味があります
o 登壇したり本を書いたり…
o Microsoft MVP for Visual Studio and Development Technologies
(2015, 2016, 2017)
• 旅行(18きっぷ)
• ラーメン二郎
o ホームは仙台
4.
4
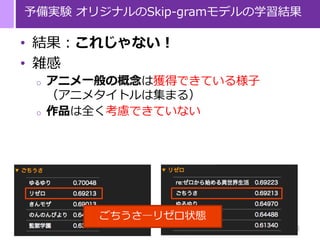
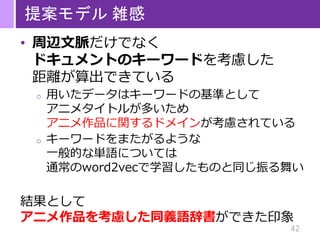
研究内容
• 文字列処理
o 特にパターンマッチングの研究
•New Variants of Pattern Matching
with Constants and Variables [Igarashi+ 2017, f]
o SOFSEM 2018で発表予定
[f] https://arxiv.org/abs/1705.09504
Pattern: XaXYb
Text: aaabb
Match
貢献
・一般化した問題を定義
・既存手法を工夫すると同じ
計算量で解けることを示した
・(既存研究の間違い訂正)
13
検索クエリなどの関係情報を利用した同義語判定
A Framework forRobust Discovery of
Entity Synonyms [Kaushik+ 2012, c]
• 検索クエリ集合とWebドキュメント集合を用いて
自動的に固有表現のシノニムを検出
• 応用例として検索エンジンの
「関連するキーワード」
o 論文内で”Canon EOS 400d Digital Camera”と
”canon rebel xti”と”canon kiss k”が
同じクエリだということを検出したいと述べている
[c] Chakrabarti, Kaushik, et al. "A framework for robust discovery of entity synonyms." Proceedings of
the 18th ACM SIGKDD international conference on Knowledge discovery and data mining. ACM, 2012.
https://www.microsoft.com/en-us/research/wp-content/uploads/2012/01/idg811-cheng.pdf
14.
14
検索クエリなどの関係情報を利用した同義語判定
ClickSim [Cheng+ 2010,d]
検索クエリ 𝑟𝑒, 𝑠𝑒 が与えられたとき
ただし𝑎𝑢𝑥(𝑤)は検索クエリ𝑤によってクリックされたドキュメント集合
[d] Cheng, Tao, Hady W. Lauw, and Stelios Paparizos. "Fuzzy matching of web queries to structured
data." Data Engineering (ICDE), 2010 IEEE 26th International Conference on. IEEE, 2010.
ドキュメント集合クエリ集合
𝑟𝑒
𝑠 𝑒
𝐹𝑐𝑠𝑖𝑚 =
2
3
36
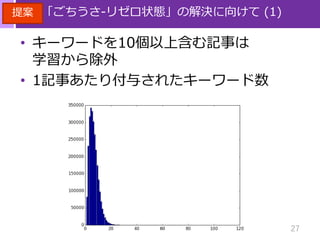
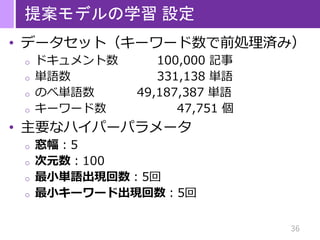
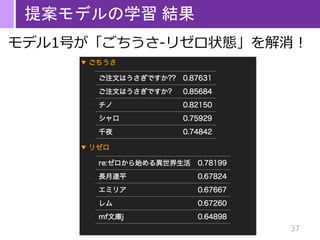
提案モデルの学習 設定
• データセット(キーワード数で前処理済み)
oドキュメント数 100,000 記事
o 単語数 331,138 単語
o のべ単語数 49,187,387 単語
o キーワード数 47,751 個
• 主要なハイパーパラメータ
o 窓幅:5
o 次元数:100
o 最小単語出現回数:5回
o 最小キーワード出現回数:5回
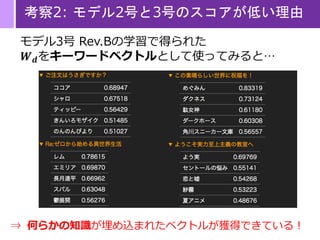
43
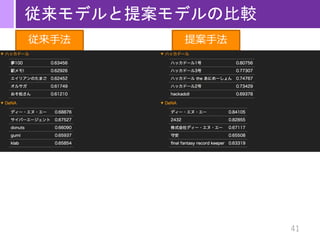
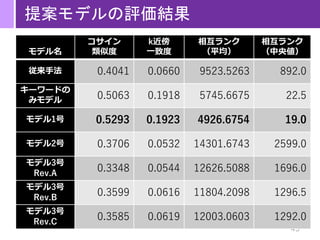
提案モデルの評価
• データセット
o ハッカドールに登録されている
シノニム辞書5600組を使用
• 評価手法
o コサイン類似度
o k近傍一致度
o 相互ランク
• 評価対象
o 通常のSkip-gramモデル (Skip-gram)
o 周辺単語の代わりにキーワードを用いた学習した
Skip-gramモデル (Skip-gram Keyword)
o 提案手法 (Skip-gram ModType A/B)

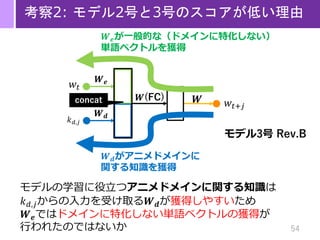
![4
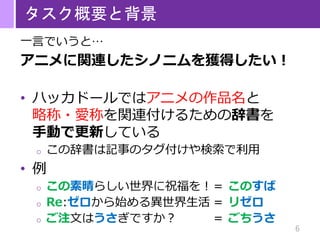
研究内容
• 文字列処理
o 特にパターンマッチングの研究
• New Variants of Pattern Matching
with Constants and Variables [Igarashi+ 2017, f]
o SOFSEM 2018で発表予定
[f] https://arxiv.org/abs/1705.09504
Pattern: XaXYb
Text: aaabb
Match
貢献
・一般化した問題を定義
・既存手法を工夫すると同じ
計算量で解けることを示した
・(既存研究の間違い訂正)](https://image.slidesharecdn.com/dena-ai-animew2v-180112075014/85/Word2vec-4-320.jpg)
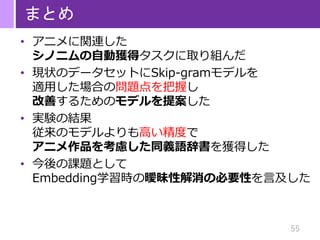
![9
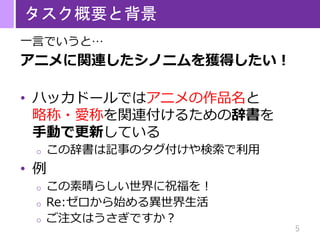
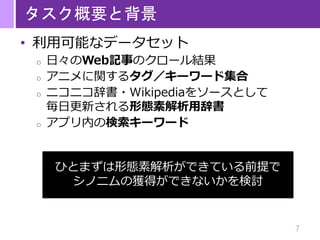
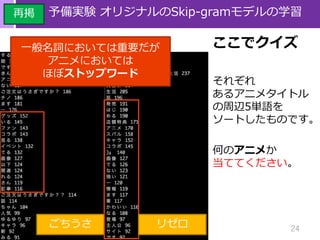
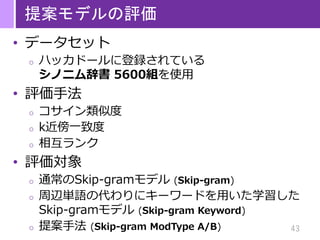
単語表記を考慮した同義語判定
単語正規化による固有表現の同義性判定 [高橋ら 2008,a]
• 同義語を以下の3つから生成されるものと仮定
o 定型文字列の追加: 接頭/接尾辞等の文字列を追加
o 表記変換: 読みを保存して表記を変換
o 省略: 文字順を保存して文字を削除
[a] 高橋いづみ, et al. "単語正規化による固有表現の同義性判定." 言語処理学会第 14 回年次大会
発表論文集 (2008): 821-824. http://www.anlp.jp/proceedings/annual_meeting/2008/pdf_dir/D4-5.pdf](https://image.slidesharecdn.com/dena-ai-animew2v-180112075014/85/Word2vec-9-320.jpg)
![10
単語表記を考慮した同義語判定
単語正規化による固有表現の同義性判定 [高橋ら 2008,a]
• 同義語を以下の3つから生成されるものと仮定
o 定型文字列の追加: 接頭/接尾辞等の文字列を追加
o 表記変換: 読みを保存して表記を変換
o 省略: 文字順を保存して文字を削除
[a] 高橋いづみ, et al. "単語正規化による固有表現の同義性判定." 言語処理学会第 14 回年次大会
発表論文集 (2008): 821-824. http://www.anlp.jp/proceedings/annual_meeting/2008/pdf_dir/D4-5.pdf](https://image.slidesharecdn.com/dena-ai-animew2v-180112075014/85/Word2vec-10-320.jpg)
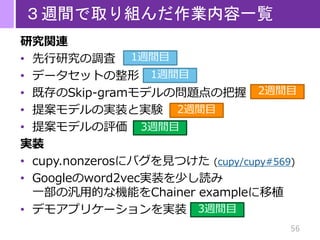
![11
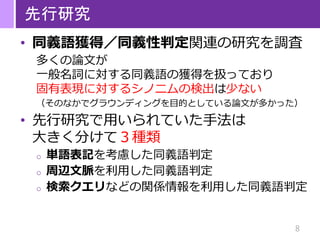
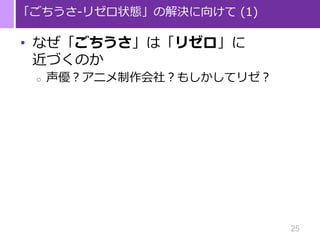
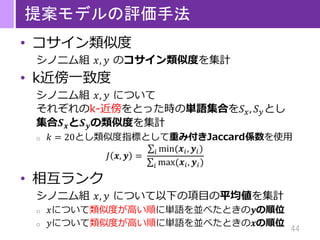
周辺文脈を利用した同義語判定
Skip-gram [Mikolov+ 2013, e]
[e] Mikolov, Tomas, et al. "Efficient estimation of word representations in vector space." arXiv preprint
arXiv:1301.3781 (2013).
𝑤𝑡−2 𝑤𝑡−1 𝑤𝑡 𝑤𝑡+1 𝑤𝑡+2… …](https://image.slidesharecdn.com/dena-ai-animew2v-180112075014/85/Word2vec-11-320.jpg)
![12
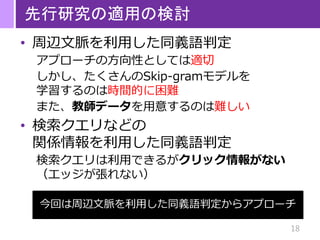
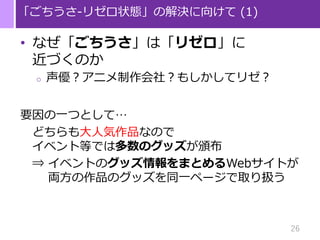
周辺文脈を利用した同義語判定
文脈限定 Skip-gram による同義語獲得 [城光ら 2017,b]
通常のSkip-gram 提案
[b] 城光英彰, 松田源立, and 山口和紀. "文脈限定 Skip-gram による同義語獲得." 自然言語処理 24.2 (2017):
187-204. https://www.jstage.jst.go.jp/article/jnlp/24/2/24_187/_article/-char/ja/
𝜙は与えられた単語の品詞・位置によって0/1をとる関数
例:
異なる𝜙を用いて254個のSkip-gramモデルを学習
⇒同義語ペアについて、それぞれのモデルで類似度を算出し
得られた254個の値を素性として線形SVMで学習](https://image.slidesharecdn.com/dena-ai-animew2v-180112075014/85/Word2vec-12-320.jpg)
![13
検索クエリなどの関係情報を利用した同義語判定
A Framework for Robust Discovery of
Entity Synonyms [Kaushik+ 2012, c]
• 検索クエリ集合とWebドキュメント集合を用いて
自動的に固有表現のシノニムを検出
• 応用例として検索エンジンの
「関連するキーワード」
o 論文内で”Canon EOS 400d Digital Camera”と
”canon rebel xti”と”canon kiss k”が
同じクエリだということを検出したいと述べている
[c] Chakrabarti, Kaushik, et al. "A framework for robust discovery of entity synonyms." Proceedings of
the 18th ACM SIGKDD international conference on Knowledge discovery and data mining. ACM, 2012.
https://www.microsoft.com/en-us/research/wp-content/uploads/2012/01/idg811-cheng.pdf](https://image.slidesharecdn.com/dena-ai-animew2v-180112075014/85/Word2vec-13-320.jpg)
![14
検索クエリなどの関係情報を利用した同義語判定
ClickSim [Cheng+ 2010, d]
検索クエリ 𝑟𝑒, 𝑠𝑒 が与えられたとき
ただし𝑎𝑢𝑥(𝑤)は検索クエリ𝑤によってクリックされたドキュメント集合
[d] Cheng, Tao, Hady W. Lauw, and Stelios Paparizos. "Fuzzy matching of web queries to structured
data." Data Engineering (ICDE), 2010 IEEE 26th International Conference on. IEEE, 2010.
ドキュメント集合クエリ集合
𝑟𝑒
𝑠 𝑒
𝐹𝑐𝑠𝑖𝑚 =
2
3](https://image.slidesharecdn.com/dena-ai-animew2v-180112075014/85/Word2vec-14-320.jpg)
![検索クエリなどの関係情報を利用した同義語判定
Pseudo Document Similarity [Kaushik+ 2012, c]
検索クエリ 𝑟𝑒, 𝑠𝑒 が与えられたとき
ただし𝑎𝑢𝑥(𝑤)は検索クエリ𝑤によってクリックされたドキュメント集合
ドキュメント集合クエリ集合
𝑟𝑒
𝐹𝑝𝑑𝑠𝑖𝑚 =
3
3
⇒”microsoft spreadsheet”と”ms excel”から“ms spreadsheet”を取れる(らしい)
𝑠 𝑒
長いクエリを分割してエッジを張る](https://image.slidesharecdn.com/dena-ai-animew2v-180112075014/85/Word2vec-15-320.jpg)
![16
先行研究の適用の検討
• ルールベースでの同義語ペアの抽出
過去約1年半のデータのなかで
「略称」「愛称」などのキーワードを含む記事
34,675 件 (1.27%)
• 単語表記を考慮した同義語判定
アニメタイトルは他の固有表現と比べて
近年難しくなる傾向にある[要出典]
例:
o 「終末なにしてますか? 忙しいですか?
救ってもらっていいですか?」
o 「僕は友達が少ない」](https://image.slidesharecdn.com/dena-ai-animew2v-180112075014/85/Word2vec-16-320.jpg)
![17
先行研究の適用の検討
• ルールベースでの同義語ペアの抽出
過去約1年半のデータのなかで
「略称」「愛称」などのキーワードを含む記事
34,675 件 (1.27%)
• 単語表記を考慮した同義語判定
アニメタイトルは他の固有表現と比べて
近年難しくなる傾向にある[要出典]
例:
o 「終末なにしてますか? 忙しいですか?
救ってもらっていいですか?」 = すかすか
o 「僕は友達が少ない」 = はがない](https://image.slidesharecdn.com/dena-ai-animew2v-180112075014/85/Word2vec-17-320.jpg)
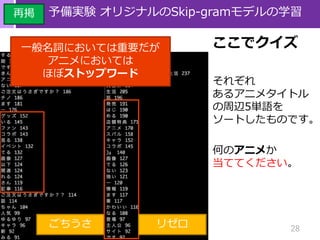
![29
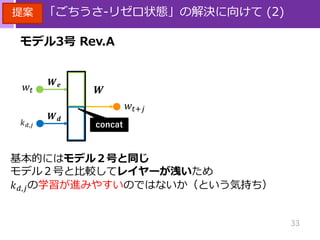
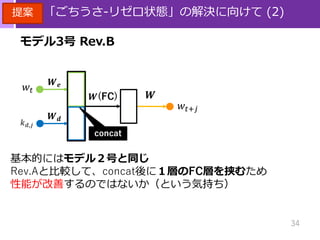
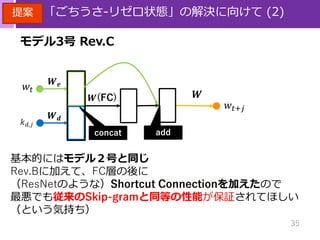
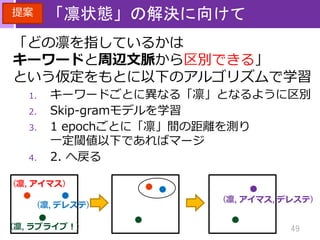
「ごちうさ‐リゼロ状態」の解決に向けて (2)
Skip-gram [Mikolov+ 2013, e]
𝑤𝑡−2 𝑤𝑡−1 𝑤𝑡 𝑤𝑡+1 𝑤𝑡+2… …
再掲
𝑤𝑡
𝑤𝑡−2
𝑾 𝒆
𝑾
𝑤𝑡−1
𝑤𝑡+1
𝑤𝑡+2Skip-gram](https://image.slidesharecdn.com/dena-ai-animew2v-180112075014/85/Word2vec-29-320.jpg)
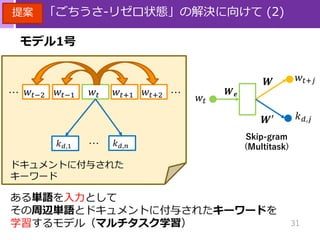
![30
「ごちうさ‐リゼロ状態」の解決に向けて (2)
Skip-gram [Mikolov+ 2013]
𝑤𝑡 𝑤𝑡+𝑗
𝑾 𝒆
𝑤𝑡−2 𝑤𝑡−1 𝑤𝑡 𝑤𝑡+1 𝑤𝑡+2… …
Skip-gram
(簡略化された図)
再掲
𝑾](https://image.slidesharecdn.com/dena-ai-animew2v-180112075014/85/Word2vec-30-320.jpg)












![[DL輪読会]BERT: Pre-training of Deep Bidirectional Transformers for Language Und...](https://cdn.slidesharecdn.com/ss_thumbnails/dlreadingpaper20181019-181019010218-thumbnail.jpg?width=640&height=640&fit=bounds)















































![タクシーxAIを支えるKubernetesとAIデータパイプラインの信頼性の取り組みについて [SRE NEXT 2020]](https://cdn.slidesharecdn.com/ss_thumbnails/202001srenext-200125032719-thumbnail.jpg?width=640&height=640&fit=bounds)

![後部座席タブレットにおけるMaaS時代を見据えた半歩先のUX設計」 [MOBILITY:dev]](https://cdn.slidesharecdn.com/ss_thumbnails/20191031mobilitydevyoneyama-191031085554-thumbnail.jpg?width=640&height=640&fit=bounds)
![ドライブレコーダ映像からの3次元空間認識 [MOBILITY:dev]](https://cdn.slidesharecdn.com/ss_thumbnails/20191031mobilitydevmiyazawa-191031085336-thumbnail.jpg?width=640&height=640&fit=bounds)
![MOVで実践したサーバーAPI実装の超最適化について [MOBILITY:dev]](https://cdn.slidesharecdn.com/ss_thumbnails/20191031mobilitydevera-191031084650-thumbnail.jpg?width=640&height=640&fit=bounds)

![課題ドリブン、フルスタックAI開発術 [MOBILITY:dev]](https://cdn.slidesharecdn.com/ss_thumbnails/20191031mobilitydevkuzuoka-191031073741-thumbnail.jpg?width=640&height=640&fit=bounds)
