Download to read offline



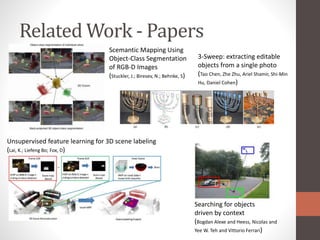




Beatrice van Eden is a part-time PhD student and full-time CSIR employee researching scene identification based on concept learning for robots. She aims to give mobile robots the ability to continuously and autonomously form concepts of their environment based on previous experiences. Her approach involves identifying items in a scene, determining the most feasible scene, and recognizing or contributing to a scene concept. Her related work focuses on papers about object-driven context searching, semantic mapping using object-class segmentation, unsupervised feature learning for scene labeling, and extracting editable objects from photos. The most promising approaches for robotic concept formation and learning from experience involve recurrent neural networks, policy gradients, and optimal ordered problem solvers.