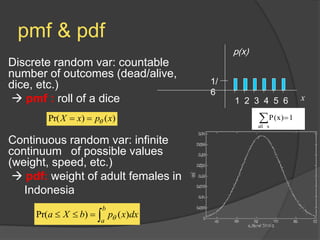
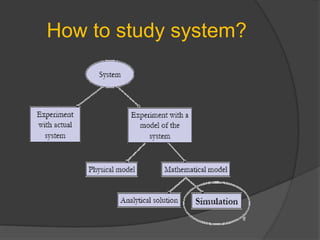
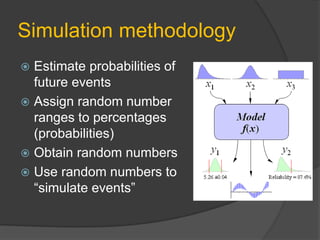
This document discusses static and dynamic models, deterministic and stochastic models, and various methods for studying systems with uncertainty. Deterministic models use differential equations to exactly predict outcomes, while stochastic models use random variables and can only compute probabilities. Numerical methods and simulation are introduced as ways to study more complex systems. Simulation models represent real systems and allow experiments to be performed faster and safer. Monte Carlo methods and discrete event simulation are discussed as techniques for simulation.

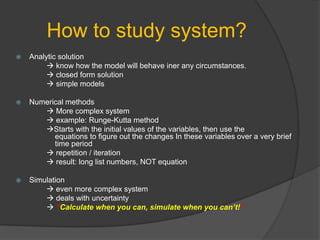
![Simulation methods – Monte Carlo
“Birthday problem”
Out of a group of 100 people, 2 people share a brithday
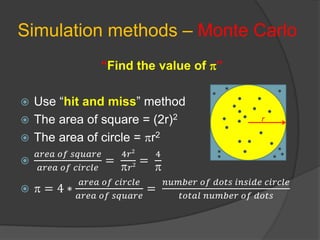
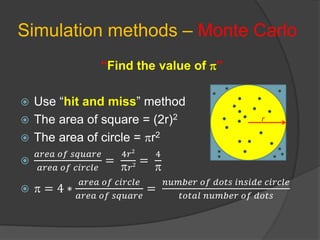
Use “hit and miss” method
1. Pick 30 random numbers in the rang [1,365], each number
represent a day in a year
2. Check to see if any of the 30 random numbers are equal
3. Go back to step [1] and repeat 10,000 times
4. Report the fraction of trials that have matching birthdays](https://image.slidesharecdn.com/week08-230811231733-7e0be043/85/Week08-pdf-13-320.jpg)
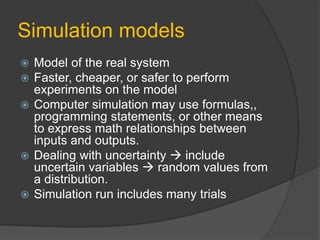
![Simulation methods – Monte Carlo
“Birthday problem”
Out of a group of 100 people, 2 people share a brithday
Use “sampling from distribution” method
1. Suppose we have the cdf of people’s birthday, F(x)
2. People’s birthday is represented as x = [1, 365]
3. Generate a random values, z, from U [0,1]
4. Compute x = F-1(z)
5. Check to see if any of the 30 random numbers are equal
6. Go back to step [3,4] and repeat 10,000 times
7. Report the fraction of trials that have matching birthdays
Many kinds of sampling, e.g.:
• Simple sampling
• Importance sampling
• Stratified sampling
• Non-stratified sampling
• Cluster sampling
• Latin hypercube
Output from Monte Carlo
can form a distribution too !](https://image.slidesharecdn.com/week08-230811231733-7e0be043/85/Week08-pdf-14-320.jpg)

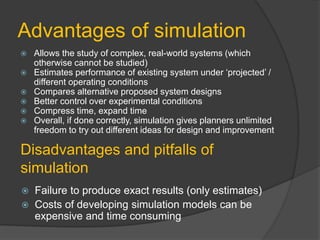
![Probability functions
A probability function maps the possible
values x against their respective
probabilities of occurrence, p(x)
p(x) [0,1]
The area under a probability function is
always 1](https://image.slidesharecdn.com/week08-230811231733-7e0be043/85/Week08-pdf-25-320.jpg)