Downloaded 15 times
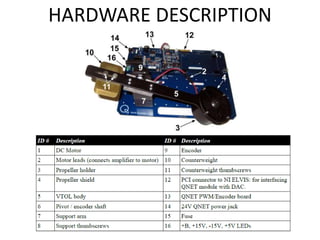
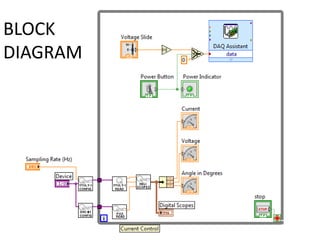
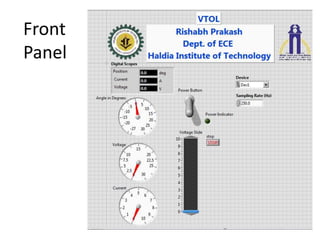
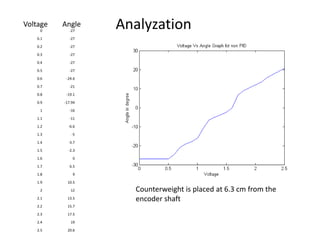

This document describes designing a graphical user interface in LabVIEW to control a vertical take-off and landing (VTOL) system. It includes a hardware description, block diagram of the interface, and details of the front panel which allows analyzing the relationship between voltage, angle, and position of a counterweight for the VTOL system.





























![Indago vtol heli-west_fac_36971_020515_lr[1]](https://cdn.slidesharecdn.com/ss_thumbnails/indagovtol-heliwestfac36971020515lr1-150614030337-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)














