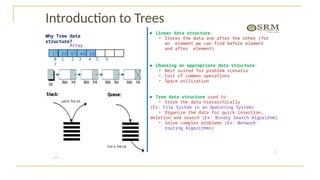
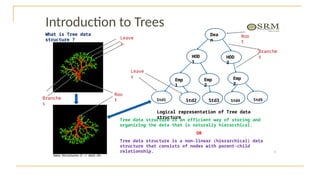
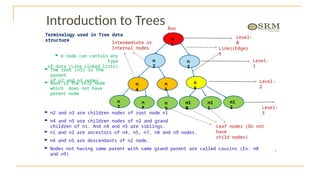
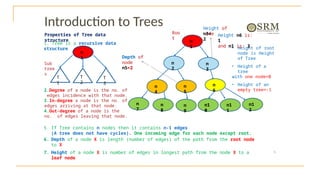
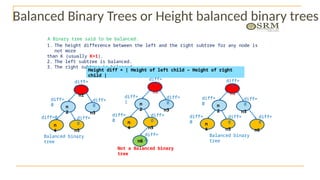
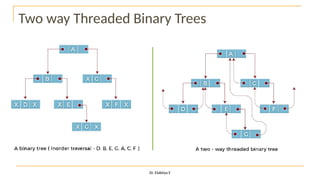
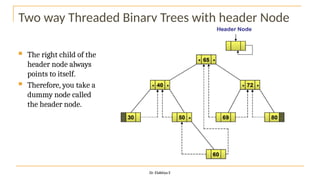
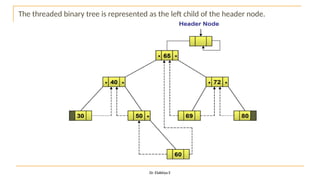
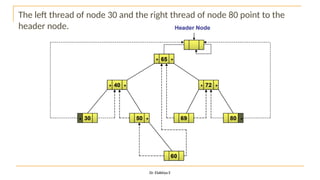
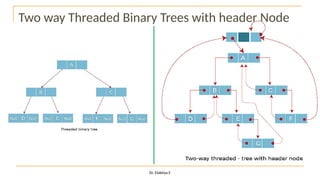
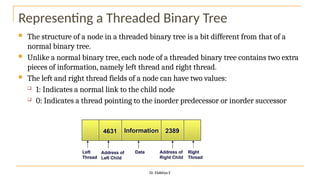
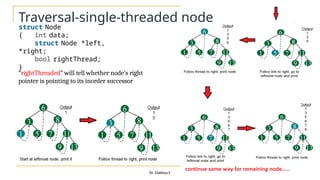
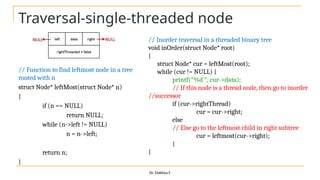
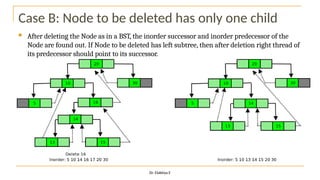
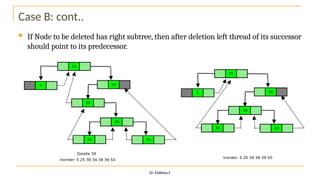
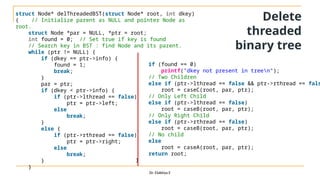
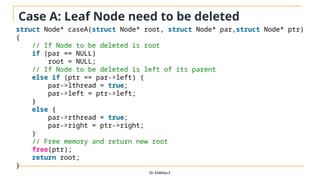
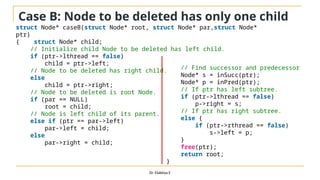
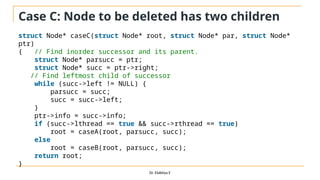
The document discusses advanced topics on tree data structures including threaded binary trees, AVL trees, B-trees, and their respective operations like insertion and deletion. It highlights key properties and terminology associated with trees, such as height, depth, and balancing methods to maintain efficiency in operations. Additionally, various types of threaded binary trees and their traversal techniques are explained, underscoring their utility in optimizing tree structures.