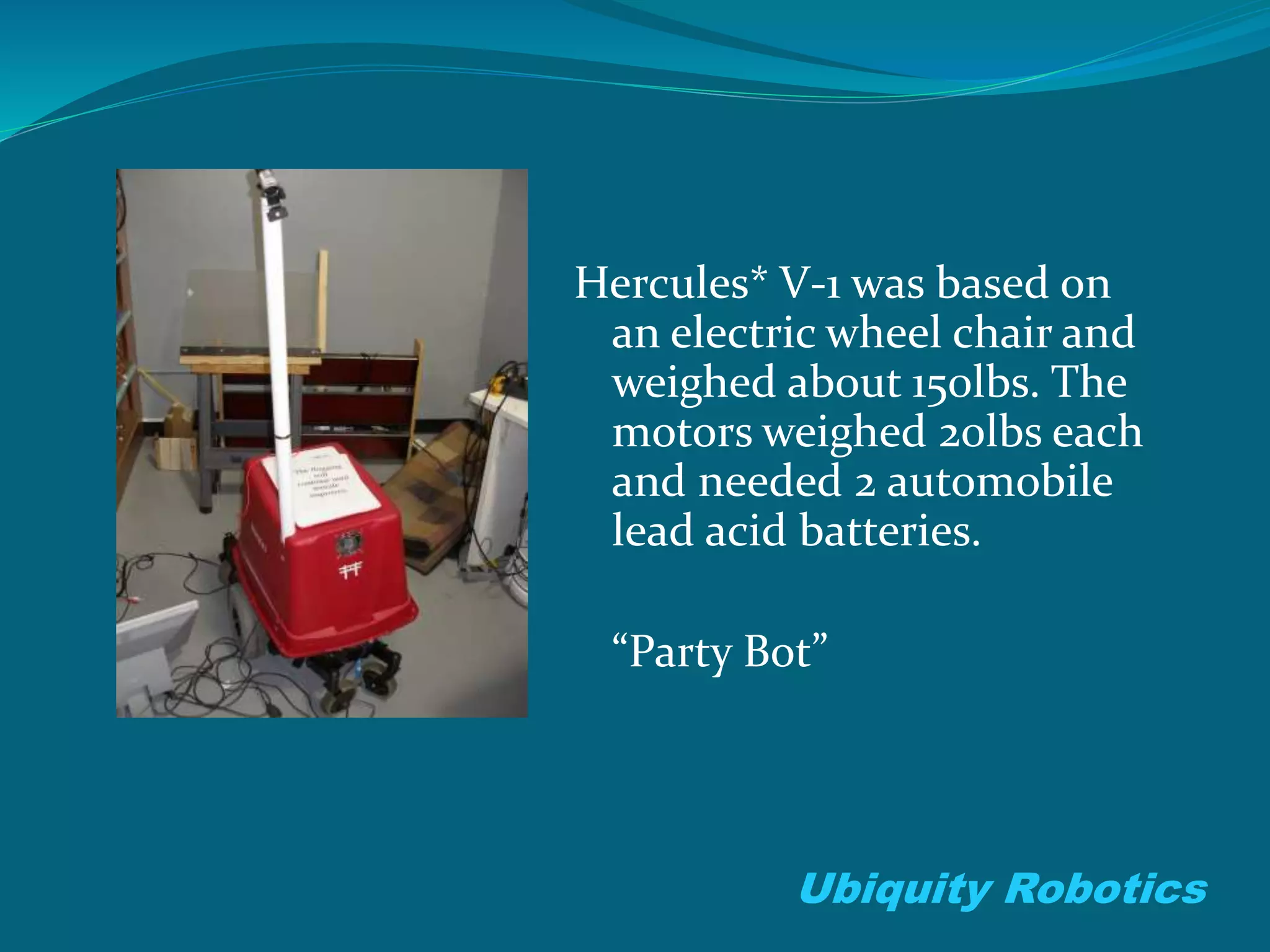
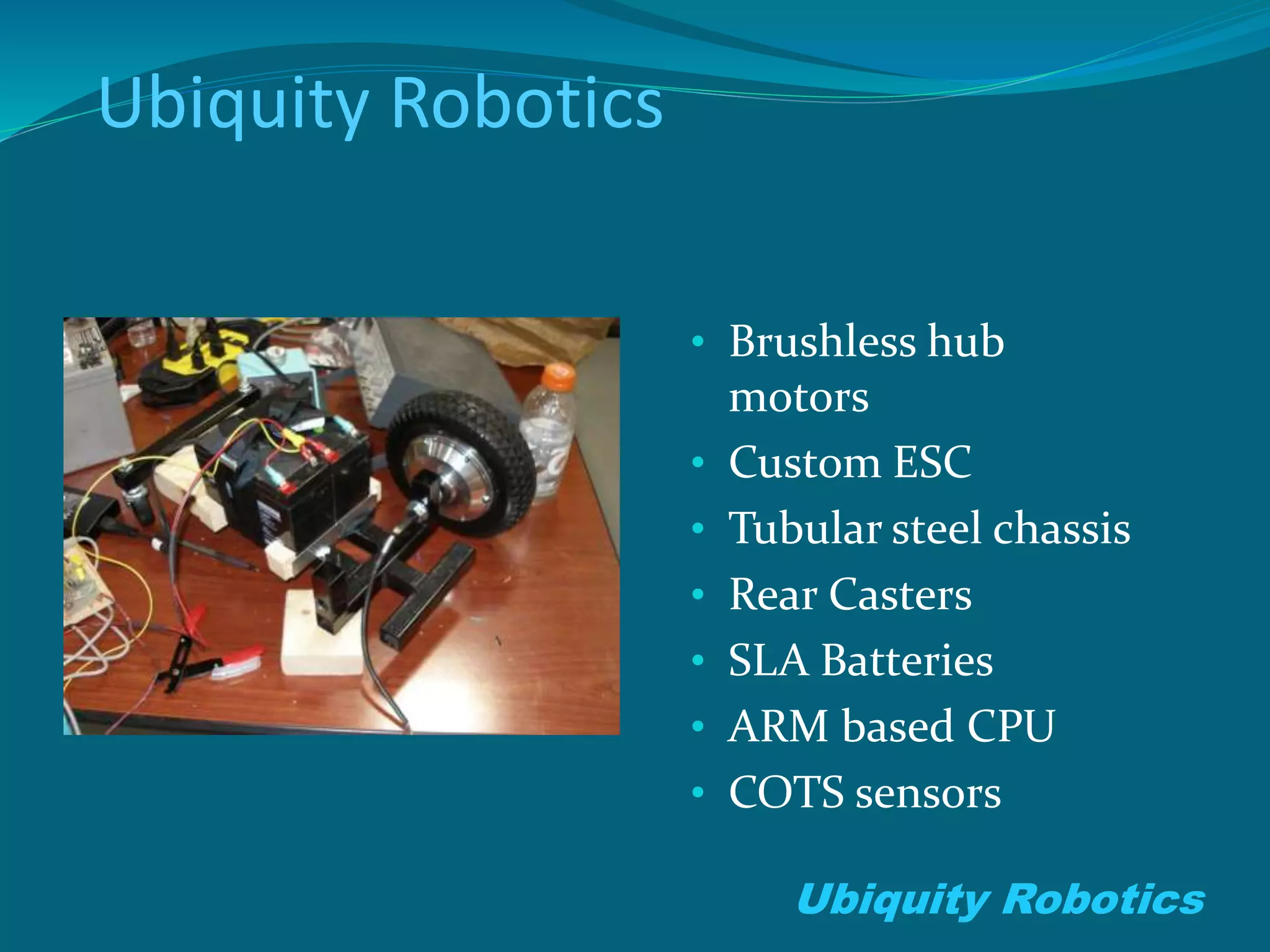
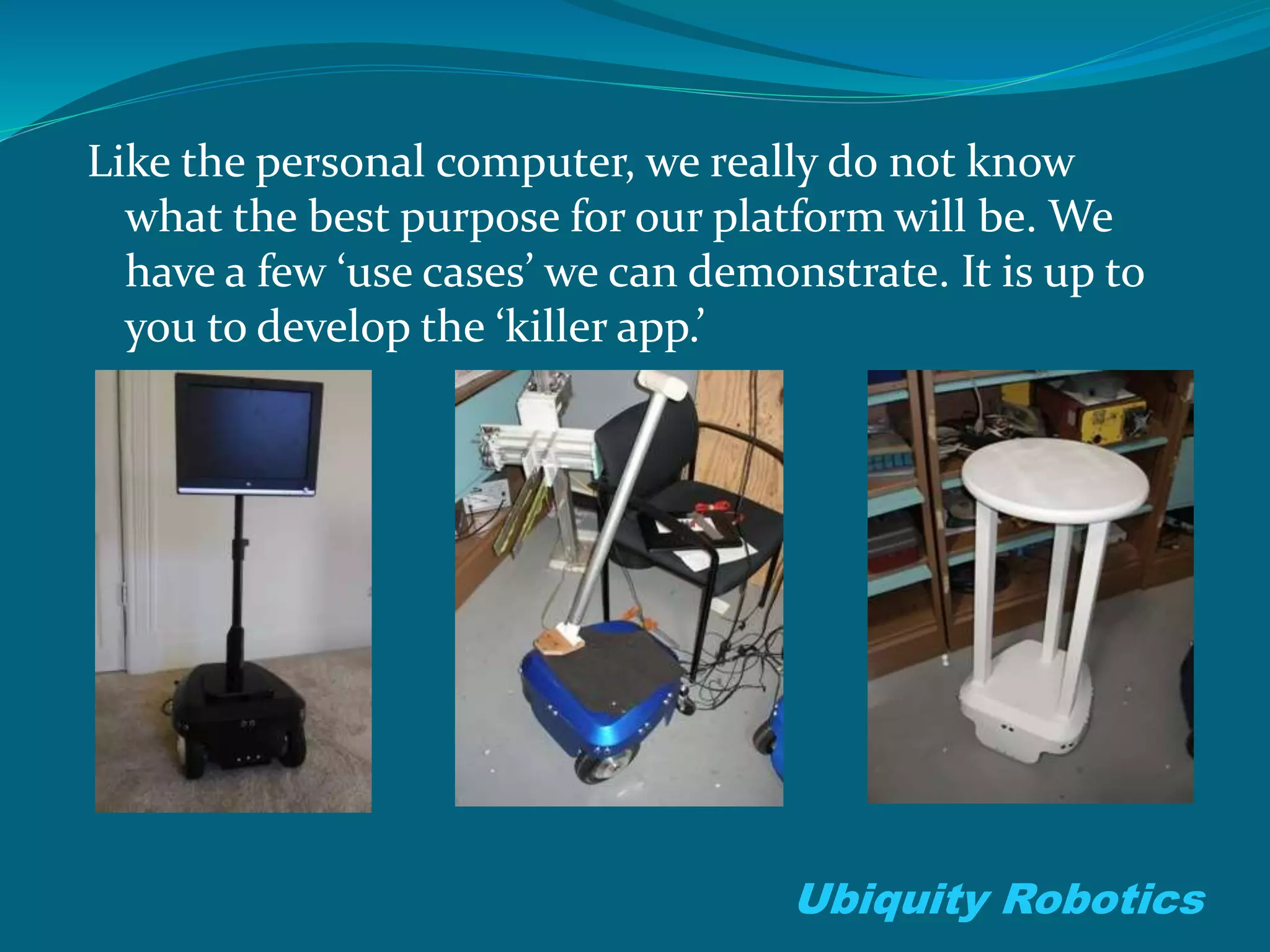
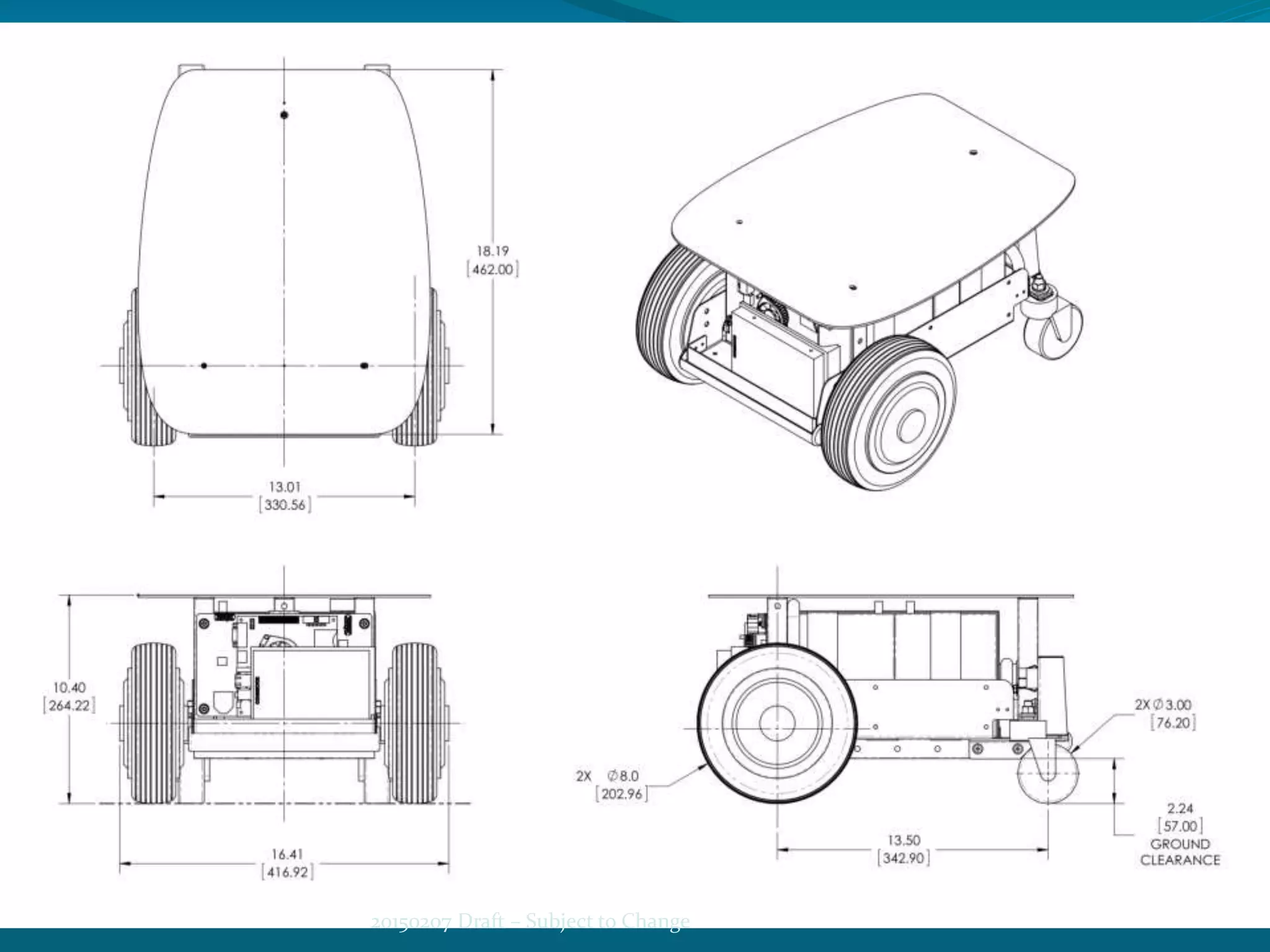
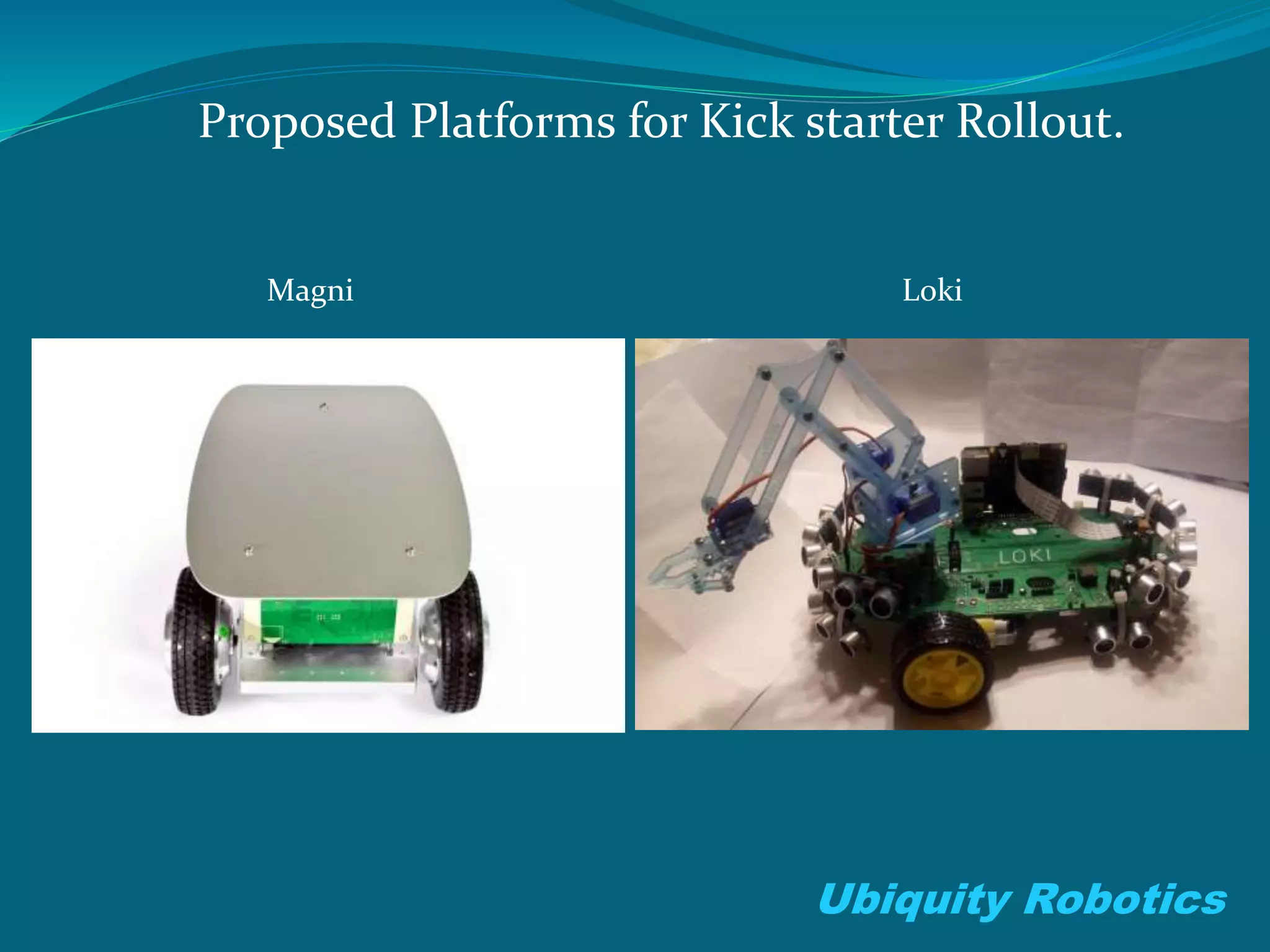
The document introduces the Ubiquity Robotics Platform, an open source robotics platform for domestic robot research and development. It aims to provide an affordable, adaptable, and capable robot platform to enable personal and domestic robot applications. The platform is based on the Robot Operating System (ROS) and uses affordable commercial off-the-shelf components. It then describes the initial Hercules robot prototype and future Magni robot platform, which will have a metal frame, 100lb payload capacity, navigation capabilities, and retail for under $1000. The document concludes by introducing the smaller Loki robot for learning ROS.