Download as PDF, PPTX








![ROS Publish / Subscribe Model
Pub
node
Sub
node
Topic
Publish Subscribe
/unexpected_activity
message
frontdoor
moving:
[
x=1,
y=0,
z=0
]
Presence Sensor
/care_system](https://image.slidesharecdn.com/ubc-robotics-dist-210723045114/85/Building-Your-Robot-using-AWS-Robomaker-22-320.jpg)
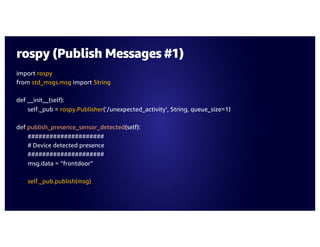
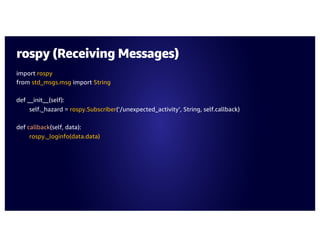
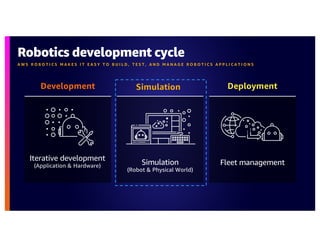

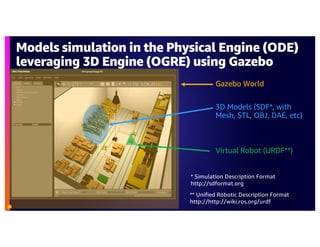
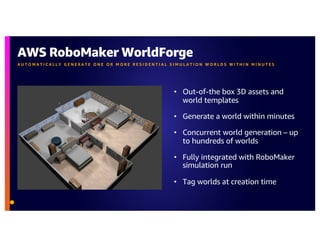
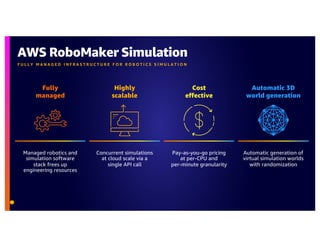
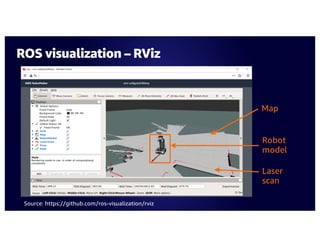
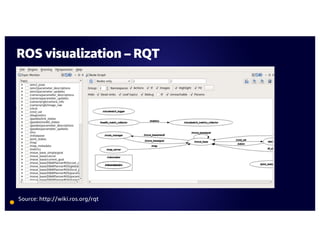
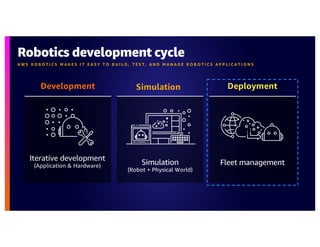
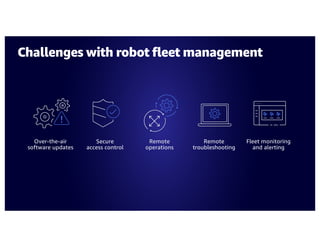

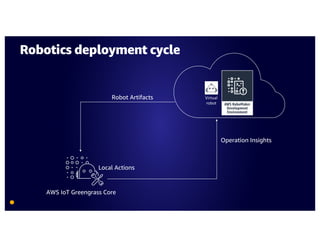
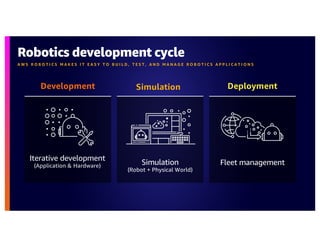



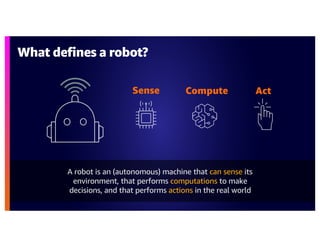
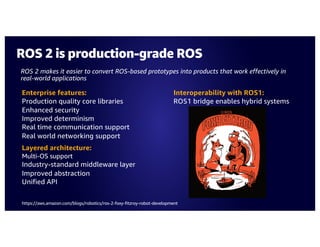
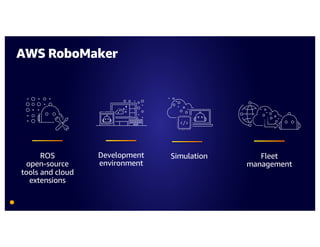
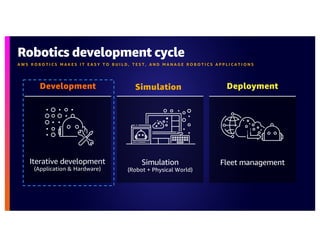
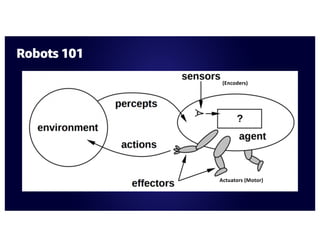
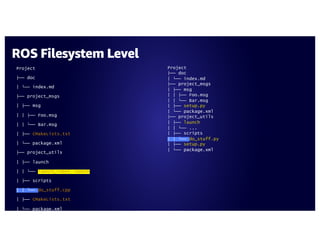
The document discusses the integration of robotics with AWS RoboMaker, emphasizing the importance of robotics in various sectors, including logistics and autonomous vehicles. It explains the components of robot development, such as simulation, iterative development, and fleet management, along with the advantages of using open-source frameworks like ROS. Additionally, it highlights the capabilities of AWS RoboMaker for simulation, deployment, and management of robotic applications at scale.