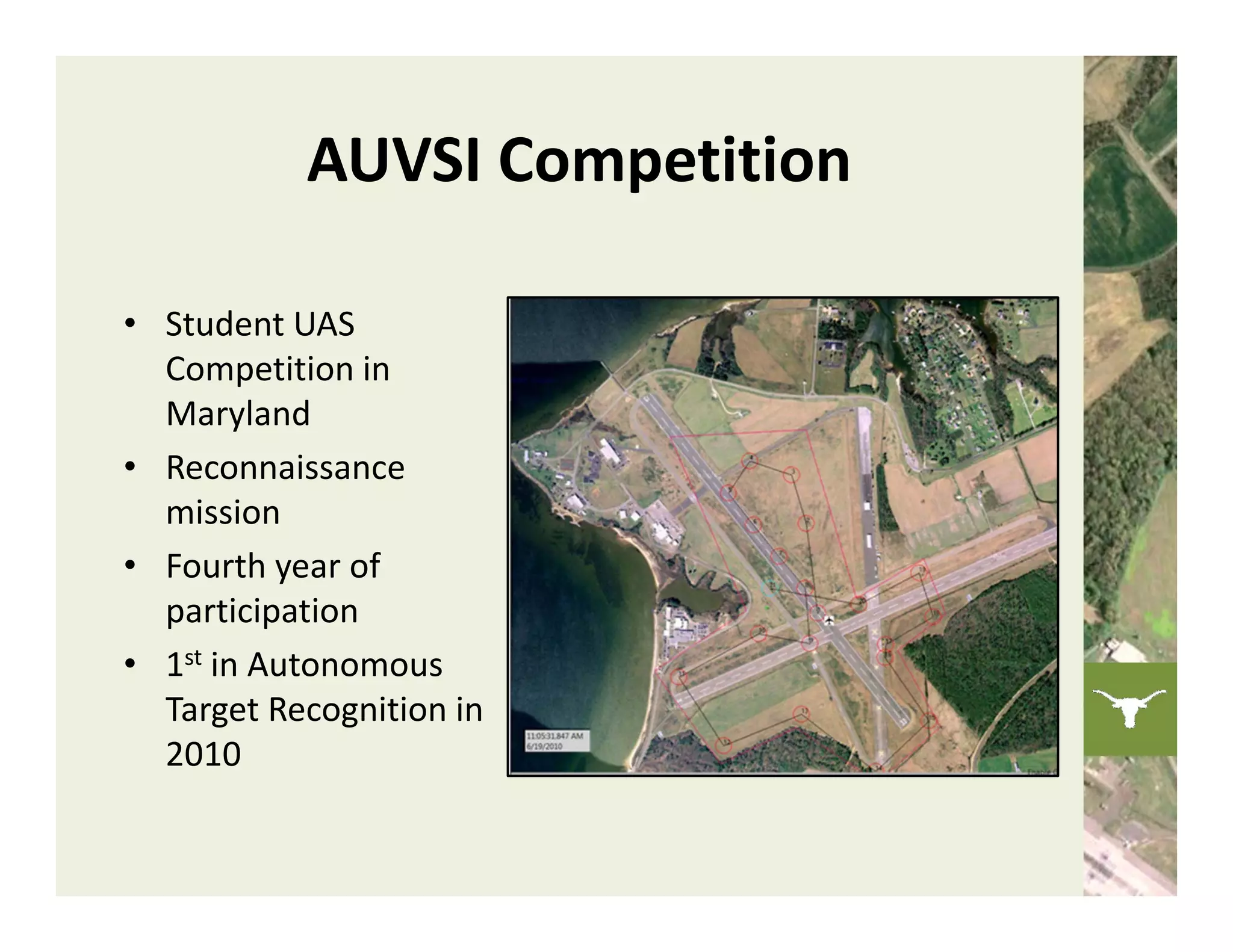
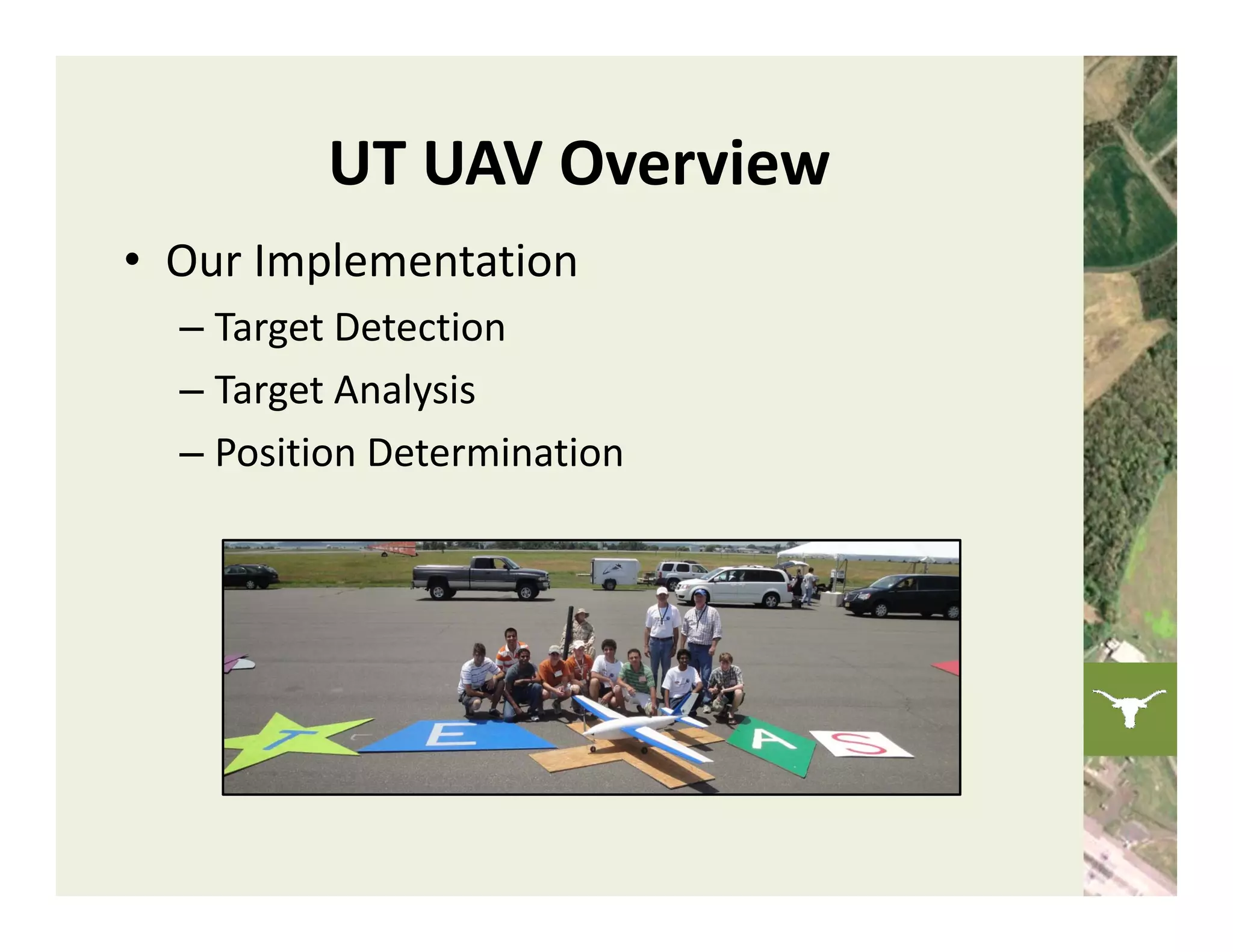
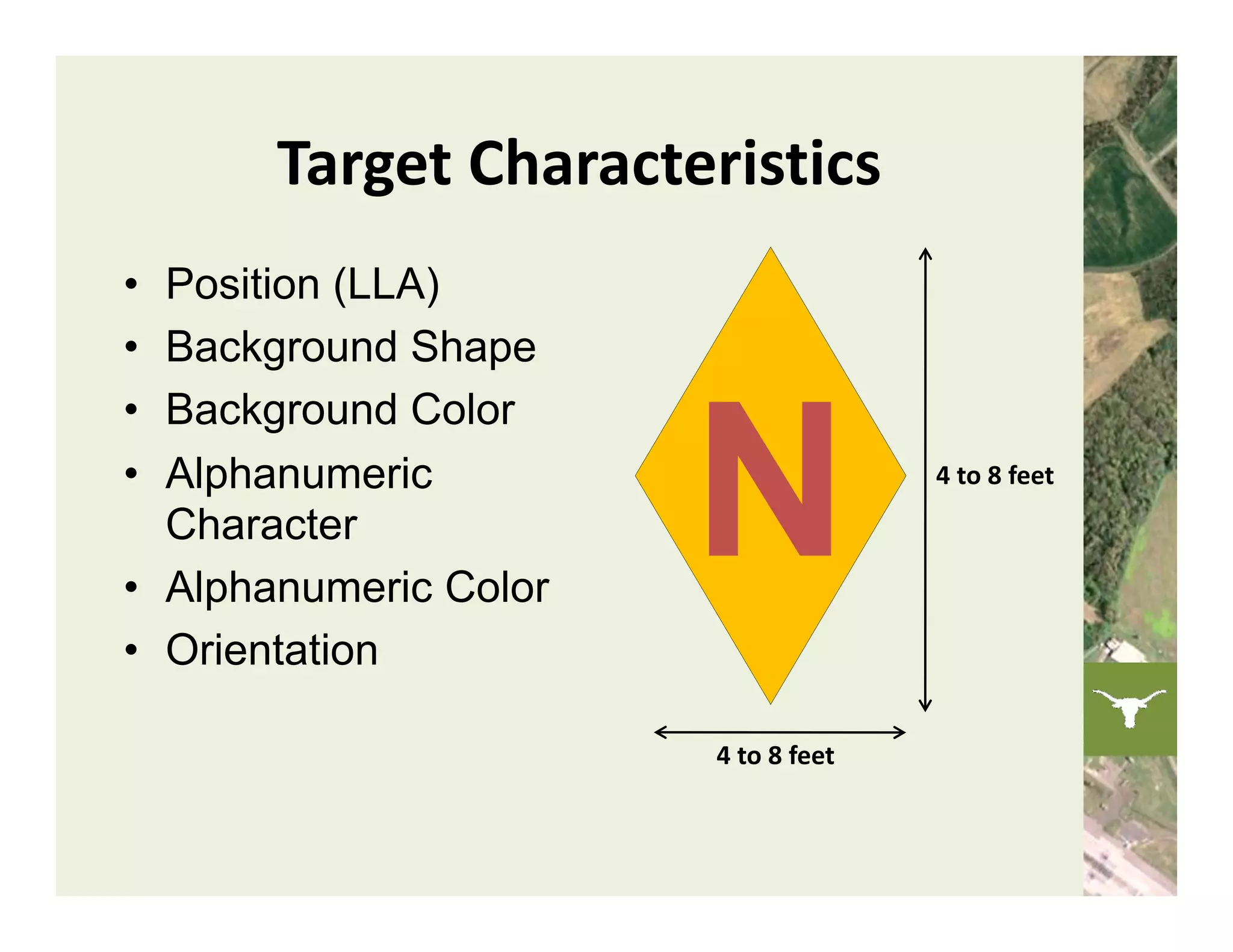
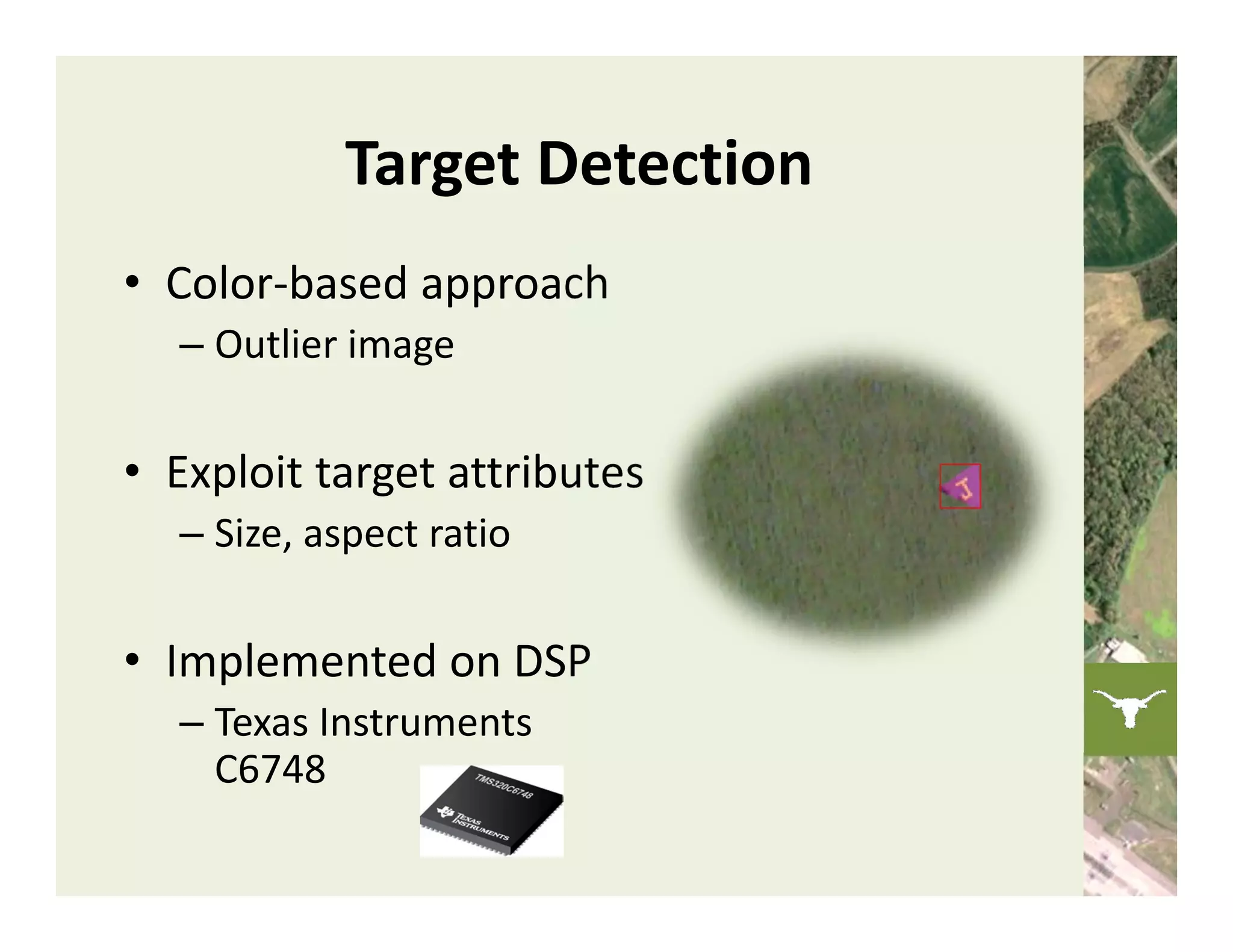
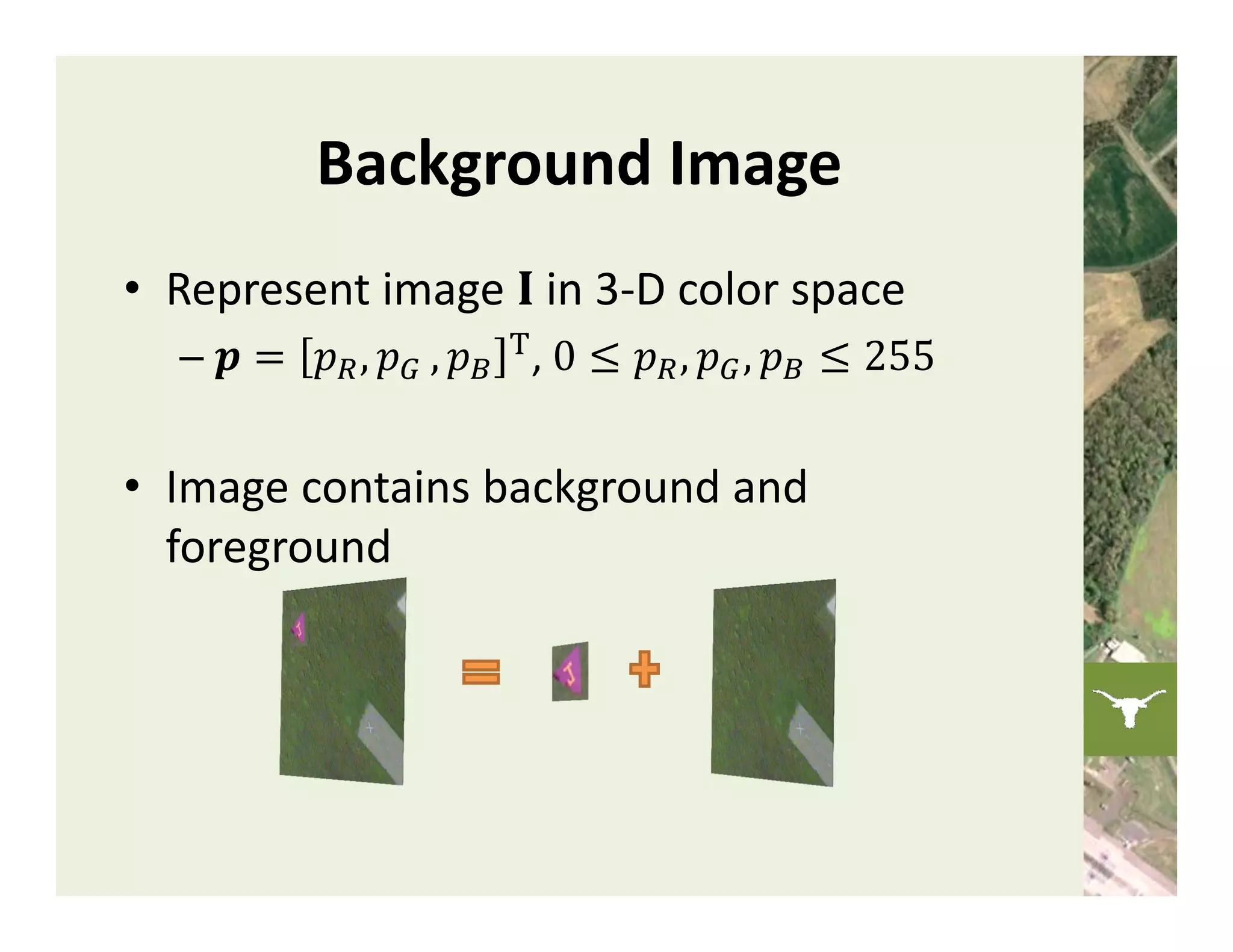
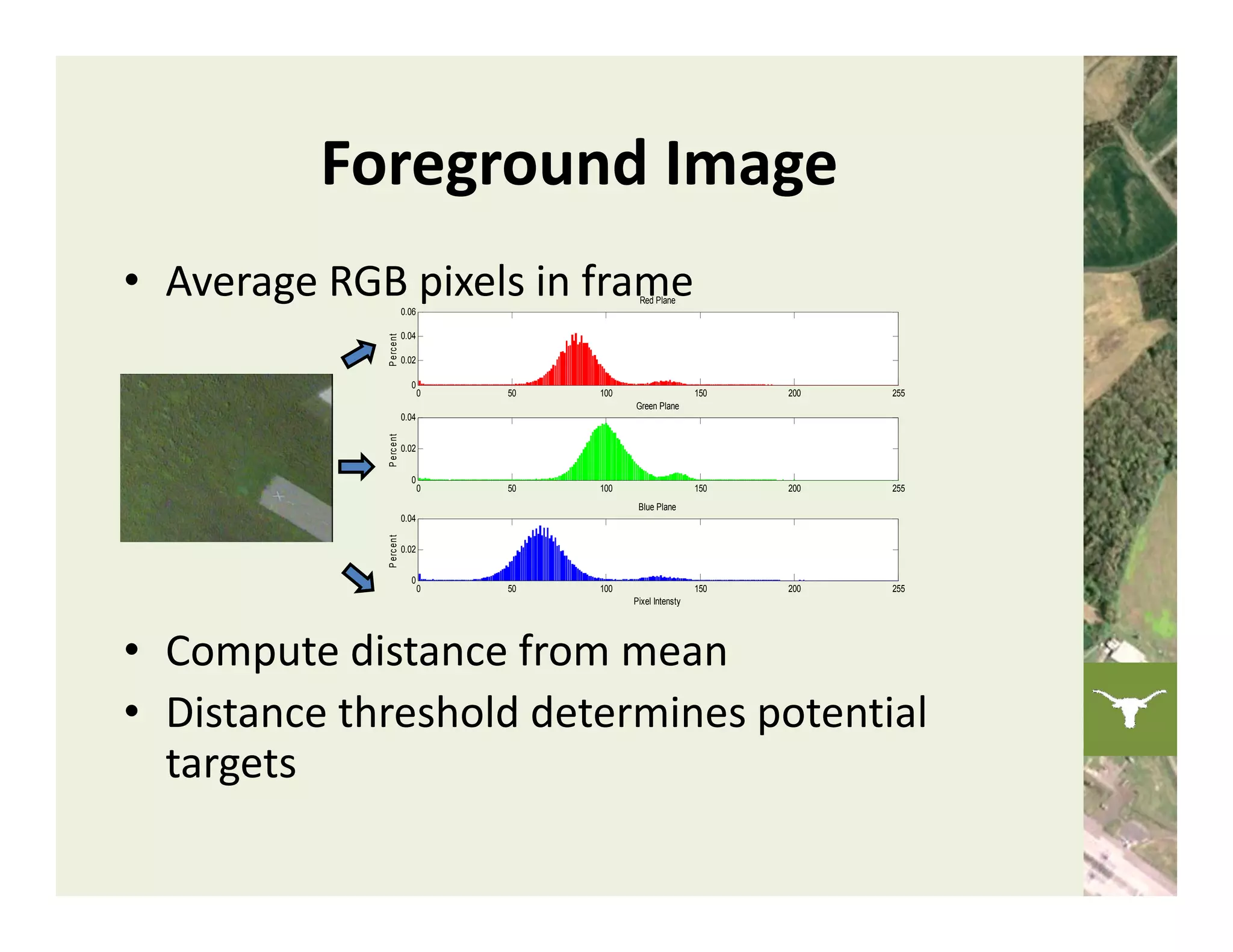
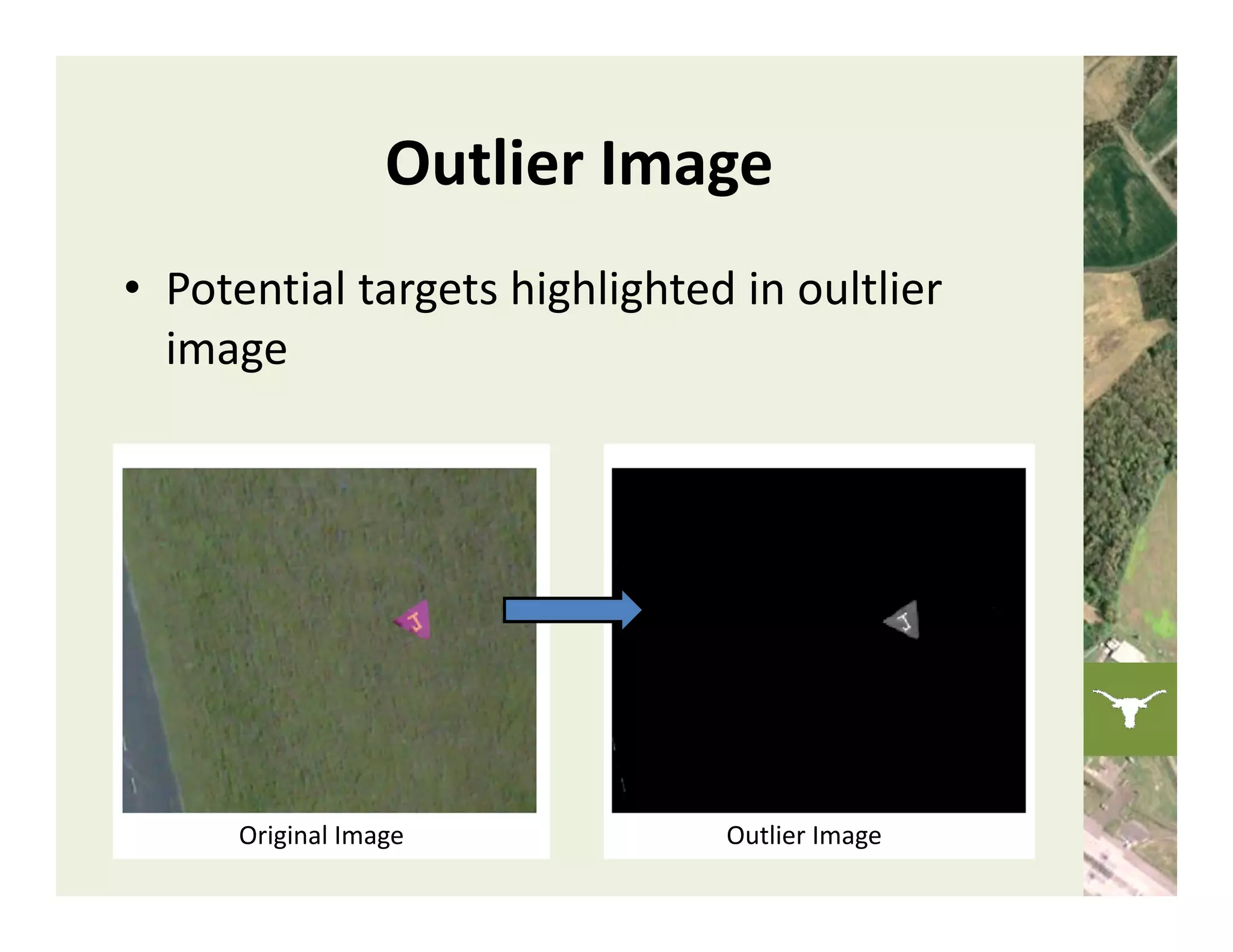
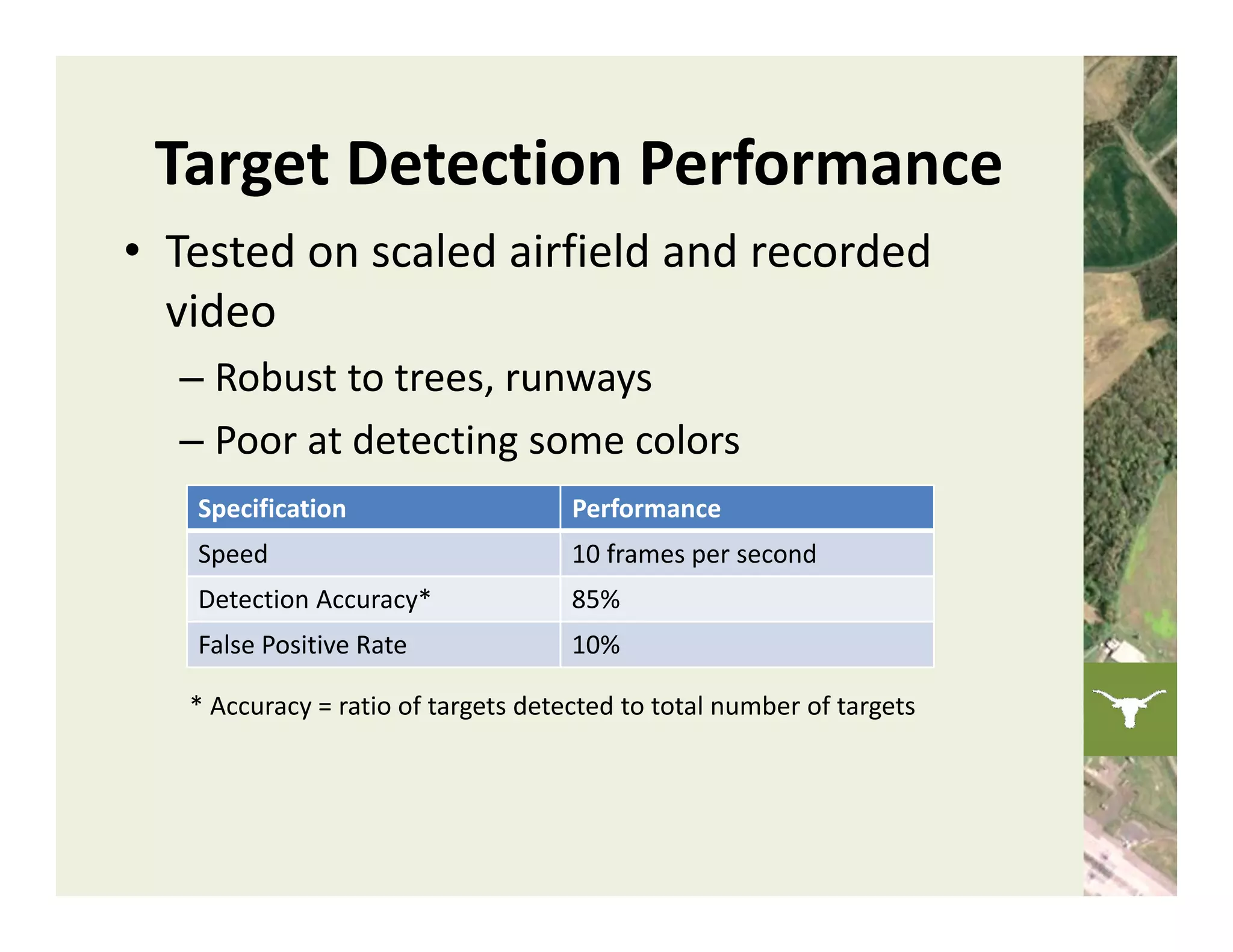
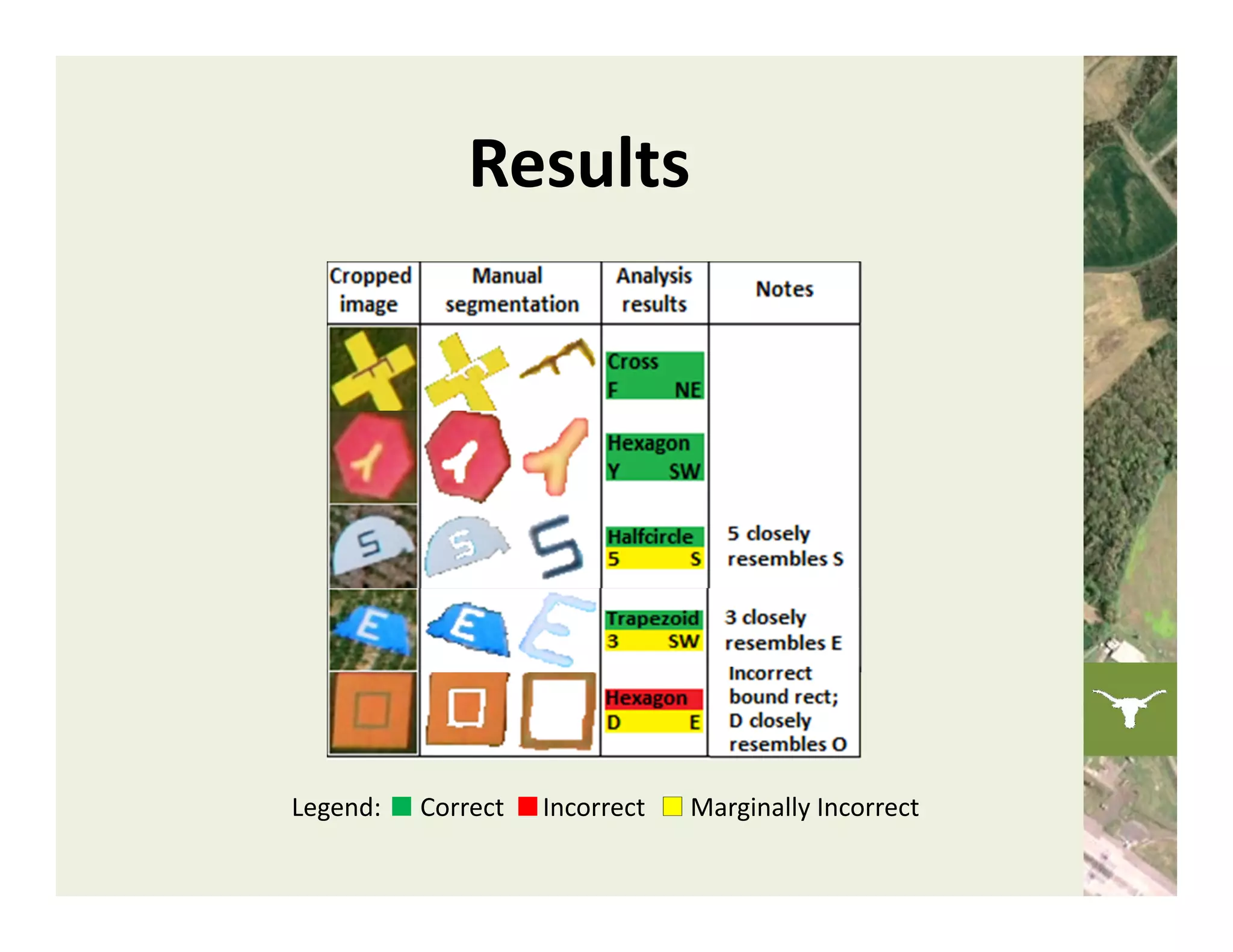
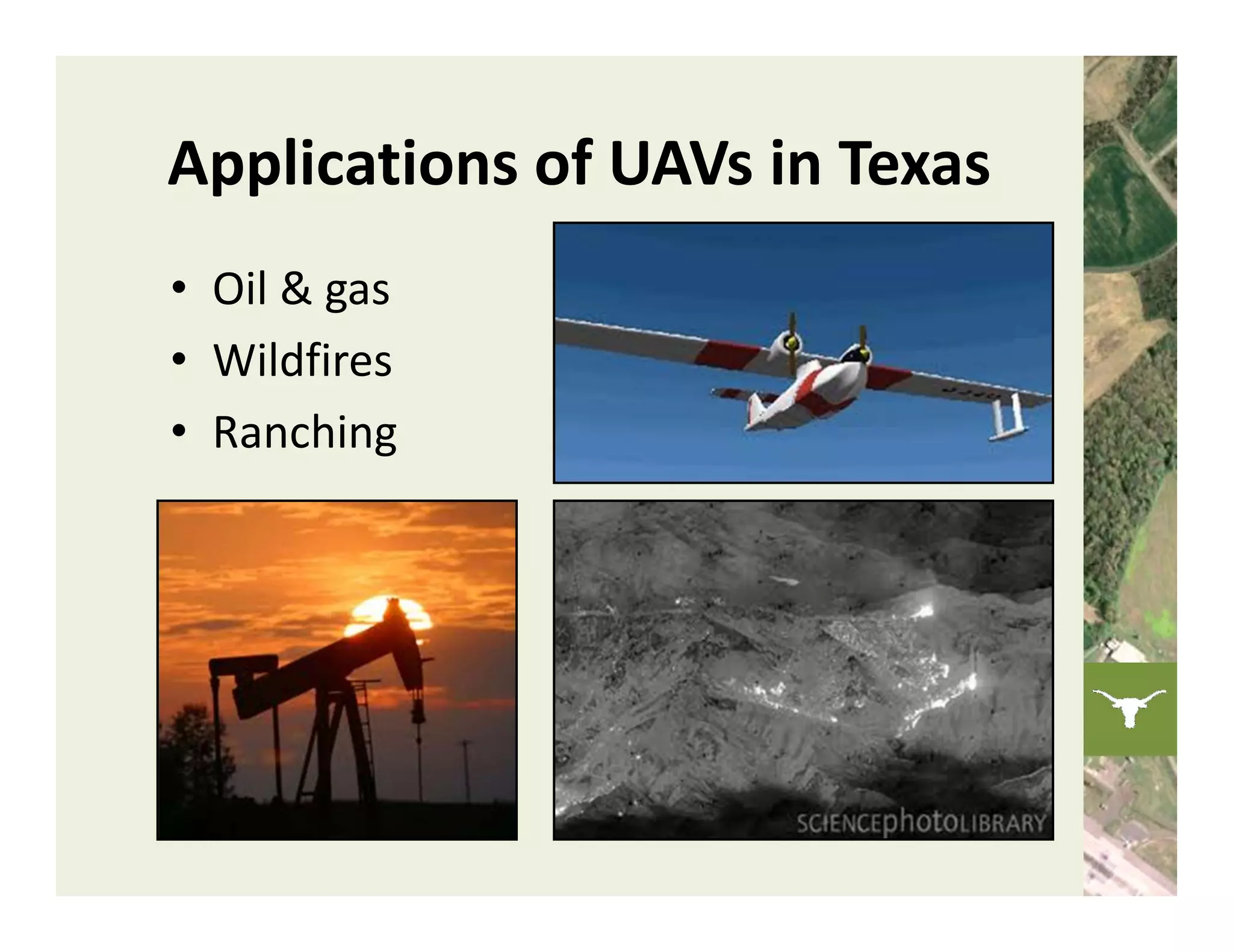
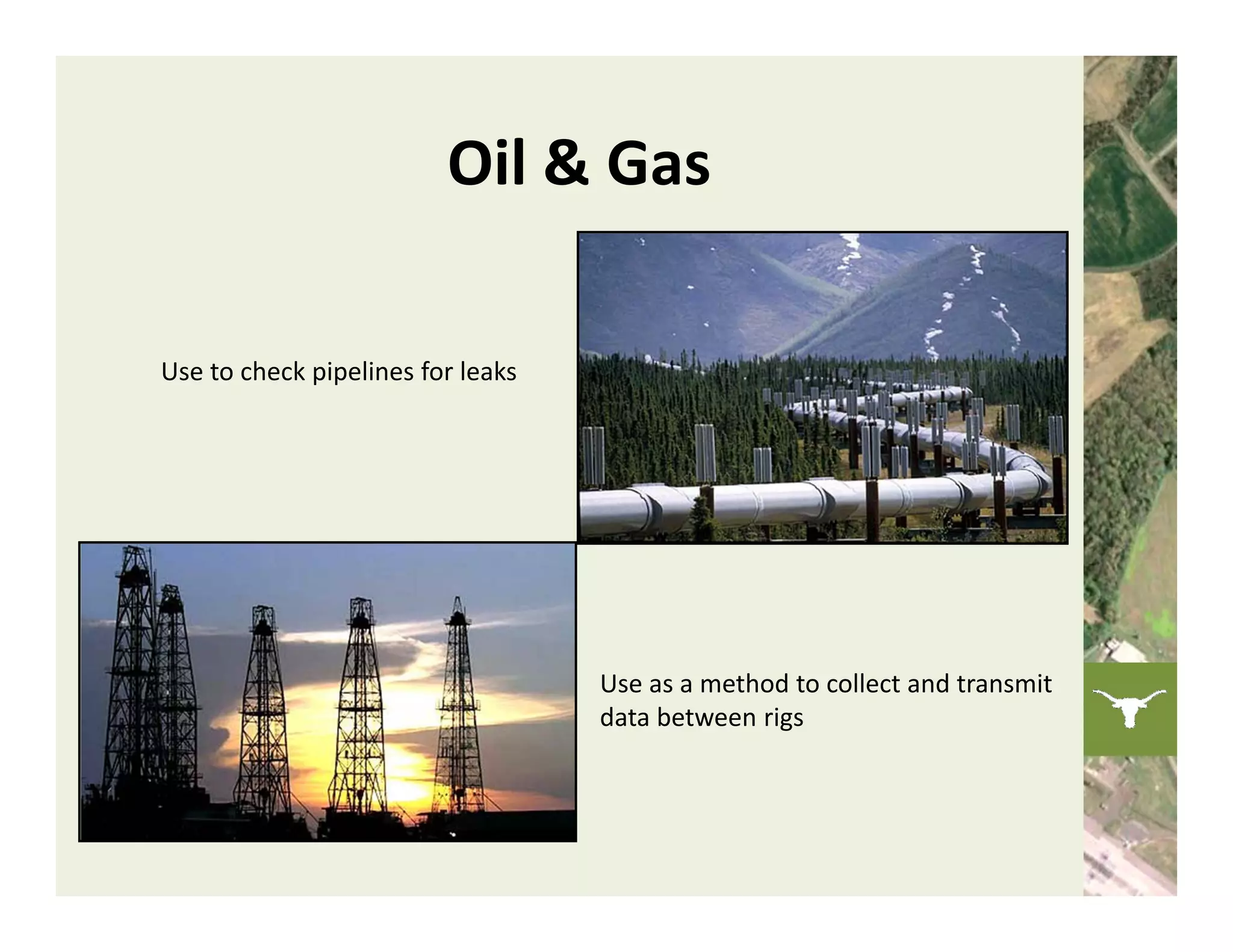
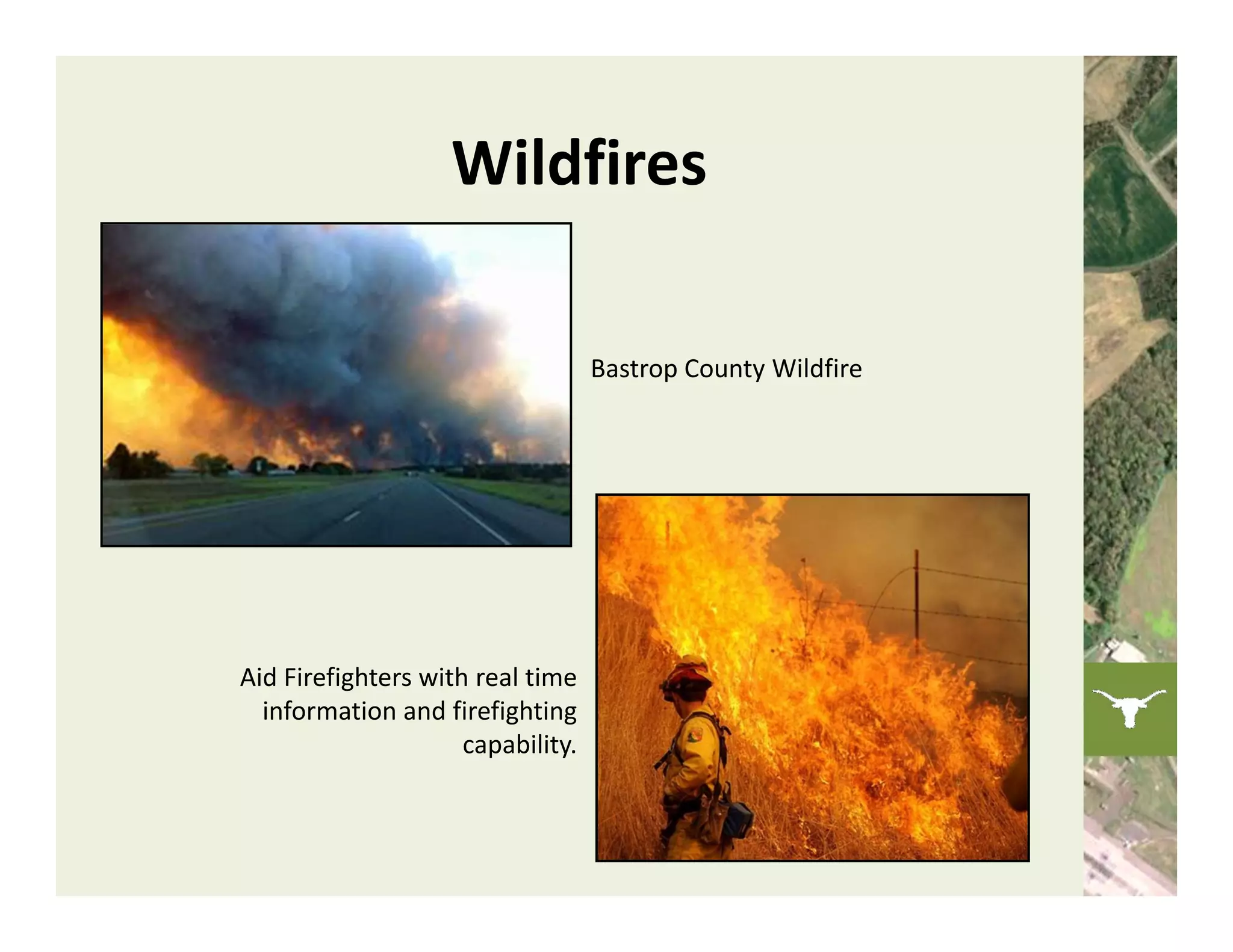
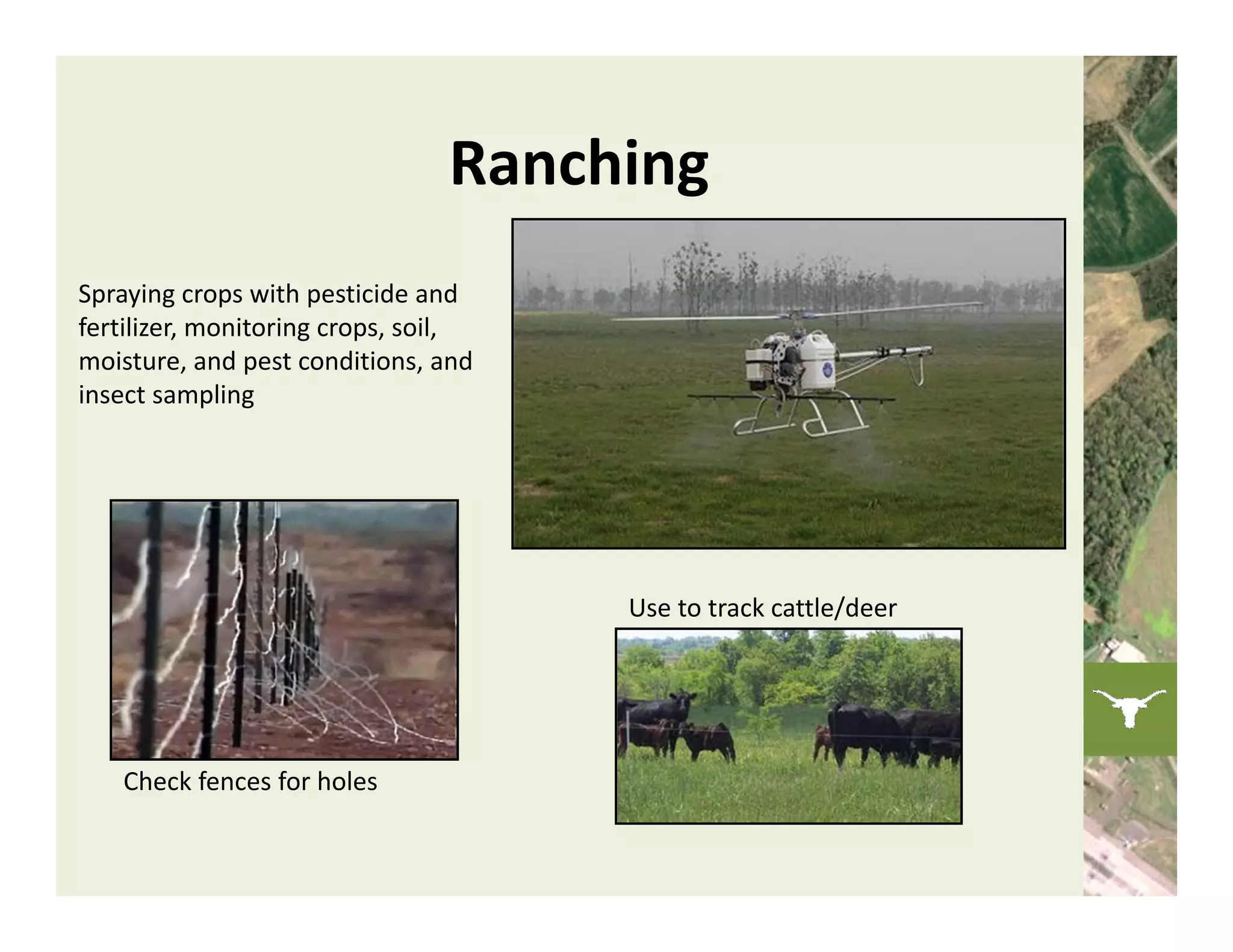
This document provides an overview of UAV image recognition technology and applications. It defines UAVs and describes the key technologies that have enabled their development, such as autopilots, GPS, and miniaturized components. It outlines the UT UAV group's work on autonomous target recognition for competition, including detecting, analyzing, and determining the position of targets in images. The group's system achieves 85% detection accuracy and aims to reduce position error below 50 feet. Potential applications of UAVs discussed include monitoring oil pipelines and ranches as well as aiding wildfire response. Strict regulations govern UAV use due to safety concerns.














































































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)









