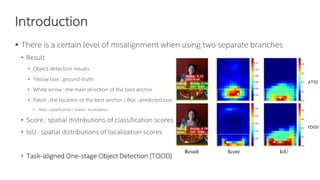
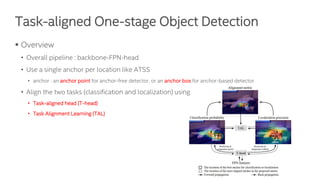
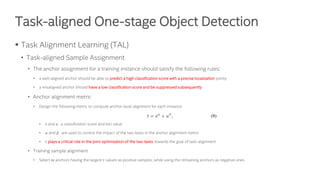
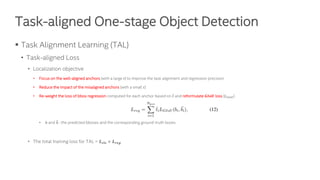
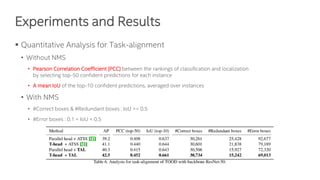
The document discusses a novel task-aligned one-stage object detection method called Tood, which aims to improve the performance of object detection by aligning classification and localization tasks through a specialized framework. It introduces task-aligned heads and learning mechanisms, resulting in superior detection accuracy compared to existing methods. Experiments demonstrate Tood's effectiveness using the COCO 2017 dataset, achieving significant advancements over the state-of-the-art models.






























![[PR12] You Only Look Once (YOLO): Unified Real-Time Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/yolo-170616085751-thumbnail.jpg?width=640&height=640&fit=bounds)