Download as PDF, PPTX

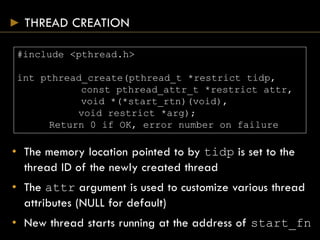
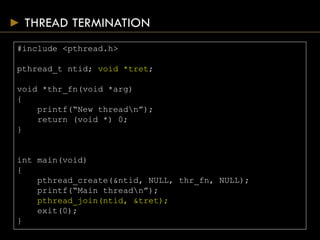


























This document provides an overview of threading in systems programming. It discusses threads, thread creation and termination, mutexes, reader-writer locks, condition variables, barriers, thread-specific data, and threads and signals. The key points are: - Threads allow a process to split into multiple simultaneous execution streams to improve performance and responsiveness. - Threads are created using pthread_create and terminated using pthread_exit or pthread_join. - Synchronization primitives like mutexes, read-write locks, and condition variables are used to coordinate access to shared resources between threads. - Thread-specific data allows threads to each have their own private copy of data.