Downloaded 39 times


![From the picture above and Newton's law, we can obtain the dynamic equations as the following:
𝑀1 𝑋̈1+𝑏1 𝑋̇1+𝐾1 𝑋1 - 𝑏1 𝑋̇2-𝐾1 𝑋2= U (1)
𝑀2 𝑋̈2+ (𝑏1 + 𝑏2)𝑋̇2+ (𝐾1 + 𝐾2)𝑋2- 𝑏1 𝑋̇1-𝐾1 𝑋1= U +𝑏2 𝑊̇ + 𝐾2 𝑊 (2)
Transfer Function Equation:
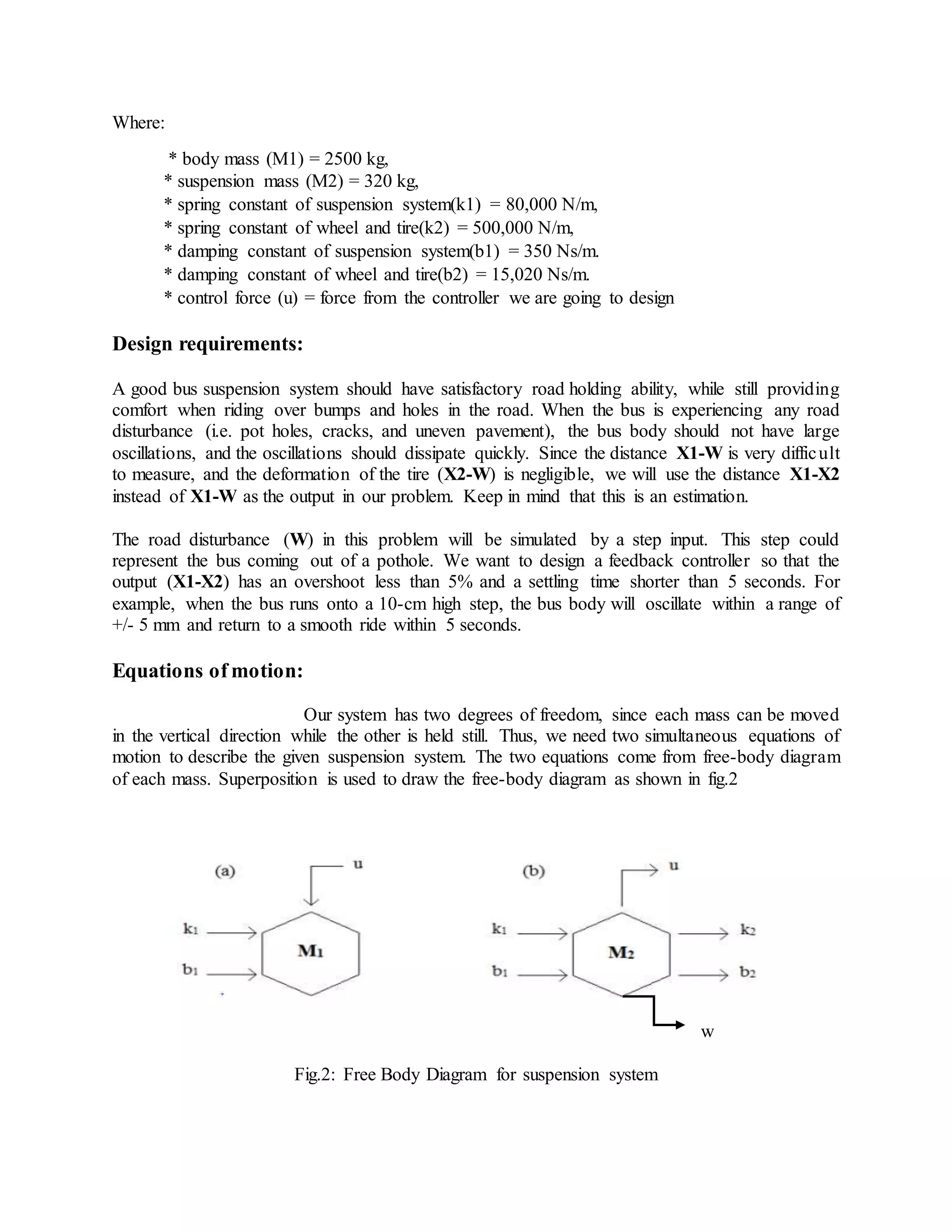
Assume that all of the initial condition are zeroes, so these equations represent the situation when
the bus wheel goes up a bump. The dynamic equations above can be expressed in a form of transfer
functions by taking Laplace Transform of the above equations. The derivation from above
equations of the Transfer Functions G1(s) and G2(s) of output, X1-X2, and two inputs U and W,
is as follows. Taking the Laplace transform of equation (1) and (2) we get the following equation
(3) and (4).
(𝑀1 𝑠2
+𝑏1 𝑠 + 𝑘1)𝑋1( 𝑠) – (𝑏1 𝑠 + 𝐾1) 𝑋2( 𝑠) = U(s) (3)
– (𝑏1 𝑠 + 𝐾1) 𝑋1( 𝑠) + (𝑀2 𝑠2
+(𝑏1 + 𝑏2 )𝑠 + (𝑘1 + 𝑘2))𝑋2( 𝑠) = (𝑏2 𝑠 + 𝐾2)𝑊(𝑠) -U(s) (4)
Equation (3) and (4) in matrix form as:
[
( 𝑀1 𝑠2
+ 𝑏1 𝑠 + 𝑘1) – ( 𝑏1 𝑠 + 𝐾1)
– ( 𝑏1 𝑠 + 𝐾1) (𝑀2 𝑠2
+ ( 𝑏1 + 𝑏2) 𝑠 + ( 𝑘1 + 𝑘2))
][
𝑋1( 𝑠)
𝑋2( 𝑠)
] =[
𝑈(𝑆)
(𝑏2 𝑠 + 𝐾2)𝑊(𝑠) − U(s)
]
Let A = [
( 𝑀1 𝑠2
+ 𝑏1 𝑠 + 𝑘1) – ( 𝑏1 𝑠 + 𝐾1)
– ( 𝑏1 𝑠 + 𝐾1) (𝑀2 𝑠2
+ ( 𝑏1 + 𝑏2) 𝑠 + ( 𝑘1 + 𝑘2))
]
∆ = det [
( 𝑀1 𝑠2
+ 𝑏1 𝑠 + 𝑘1) – ( 𝑏1 𝑠 + 𝐾1)
– ( 𝑏1 𝑠 + 𝐾1) (𝑀2 𝑠2
+ ( 𝑏1 + 𝑏2) 𝑠 + ( 𝑘1 + 𝑘2))
]
Or, ∆ = ( 𝑀1 𝑠2
+ 𝑏1 𝑠 + 𝑘1).(𝑀2 𝑠2
+ ( 𝑏1 + 𝑏2) 𝑠 + ( 𝑘1 + 𝑘2)) - ( 𝑏1 𝑠 + 𝐾1). ( 𝑏1 𝑠 + 𝐾1)
To find the value of X1(s) and X2(s), we used inverse matrix method (X=A-1B). Find the inverse
of A and then multiply with input U(s) and W(s) on the right-hand side as the following:
[
𝑋1( 𝑠)
𝑋2( 𝑠)
] =
1
∆
[
( 𝑀1 𝑠2 + 𝑏1 𝑠 + 𝑘1) – ( 𝑏1 𝑠 + 𝐾1)
– ( 𝑏1 𝑠 + 𝐾1) (𝑀2 𝑠2 + ( 𝑏1 + 𝑏2) 𝑠+ ( 𝑘1 + 𝑘2))
] [
𝑈(𝑆)
(𝑏2 𝑠 + 𝐾2 𝑊(𝑠) − U(s)
]
Multiply right-side matrix and Rearrange we will get the following matrix form.
[
𝑋1( 𝑠)
𝑋2( 𝑠)
] =
1
∆
[
( 𝑀1 𝑠2
+ 𝑏1 𝑠 + 𝑘1) – ( 𝑏1 𝑠 + 𝐾1)
– ( 𝑏1 𝑠 + 𝐾1) (𝑀2 𝑠2
+ ( 𝑏1 + 𝑏2) 𝑠 + ( 𝑘1 + 𝑘2))
][
𝑈(𝑆)
W(s)
]](https://image.slidesharecdn.com/mathreport-180121073823/75/suspension-system-project-report-5-2048.jpg)
![𝑋1( 𝑠) =
M2s2U (s) + (b1+b2)sU(s) +(k1+k2)U(s) + {(b1s+k1)(b2s+k2)}W(s) – (b1s+k1)U(s)
∆
X2(s)=
(b1s+k1)U(s)+M1s2(b2s+k2)W(s)−M1s2U(s)+b1s(b2s+k2)W(s)+k1(b2s+k2)W(s)−(b1s+k1)U(s)
∆
When we want to consider the control input U(s) only, we set W(s) = 0. Thus, we get the transfer
function G1(s) as the following:
G1(s) = [
X1(s) −X2(s)
𝑈(𝑠)
] =
( 𝑀1+𝑀2 ) 𝑠2
−𝑏2 𝑠+𝐾2
∆
When we want to consider the disturbance input W(s) only, we set U(s) = 0. Thus, we get the
transfer function G2(s) as the following:
G2(s) =
X1(s) −X2(s)
𝑊(𝑠)
=
−𝑀1 𝑏2 𝑠3
−𝑀1 𝐾2 𝑠2
∆
Matlab Code:
To implement and simulate the above transfer function we have used Matlab and Matlab Simulink.
Matlab code for above equation is:
m1 = 2500;
m2 = 320;
k1 = 80000;
k2 = 500000;
b1 = 350;
b2 = 15020;
nump=[(m1+m2) b2 k2];
denp=[(m1*m2) (m1*(b1+b2))+(m2*b1) (m1*(k1+k2))+(m2*k1)+(b1*b2)
(b1*k2)+(b2*k1) k1*k2];
G1=tf(nump,denp);
figure(1)
step(G1)
title(' Response of unit step actuated force input, U(s)');
num1=[-(m1*b2) -(m1*k2) 0 0];
den1=[(m1*m2) (m1*(b1+b2))+(m2*b1) (m1*(k1+k2))+(m2*k1)+(b1*b2)
(b1*k2)+(b2*k1) k1*k2];
G2=tf(num1,den1);
figure(2)
step(G2)
title('response for a step disturbance input W(s)');
numf=num1;
denf=nump;](https://image.slidesharecdn.com/mathreport-180121073823/75/suspension-system-project-report-6-2048.jpg)
![F=tf(numf,denf);
Kd = 208025;
Kp = 832100;
Ki = 624075;
C = pid(Kp,Ki,Kd);
sys_cl=F*feedback(G1,C);
t=0:0.05:5;
figure(3)
step(0.1*sys_cl,t)
title('Step response under PID Control')
Kd=5*Kd;
Kp=5*Kp;
Ki=3*Ki;
C=pid(Kp,Ki,Kd);
sys_cl=F*feedback(G1,C);
figure(4)
step(0.1*sys_cl,t)
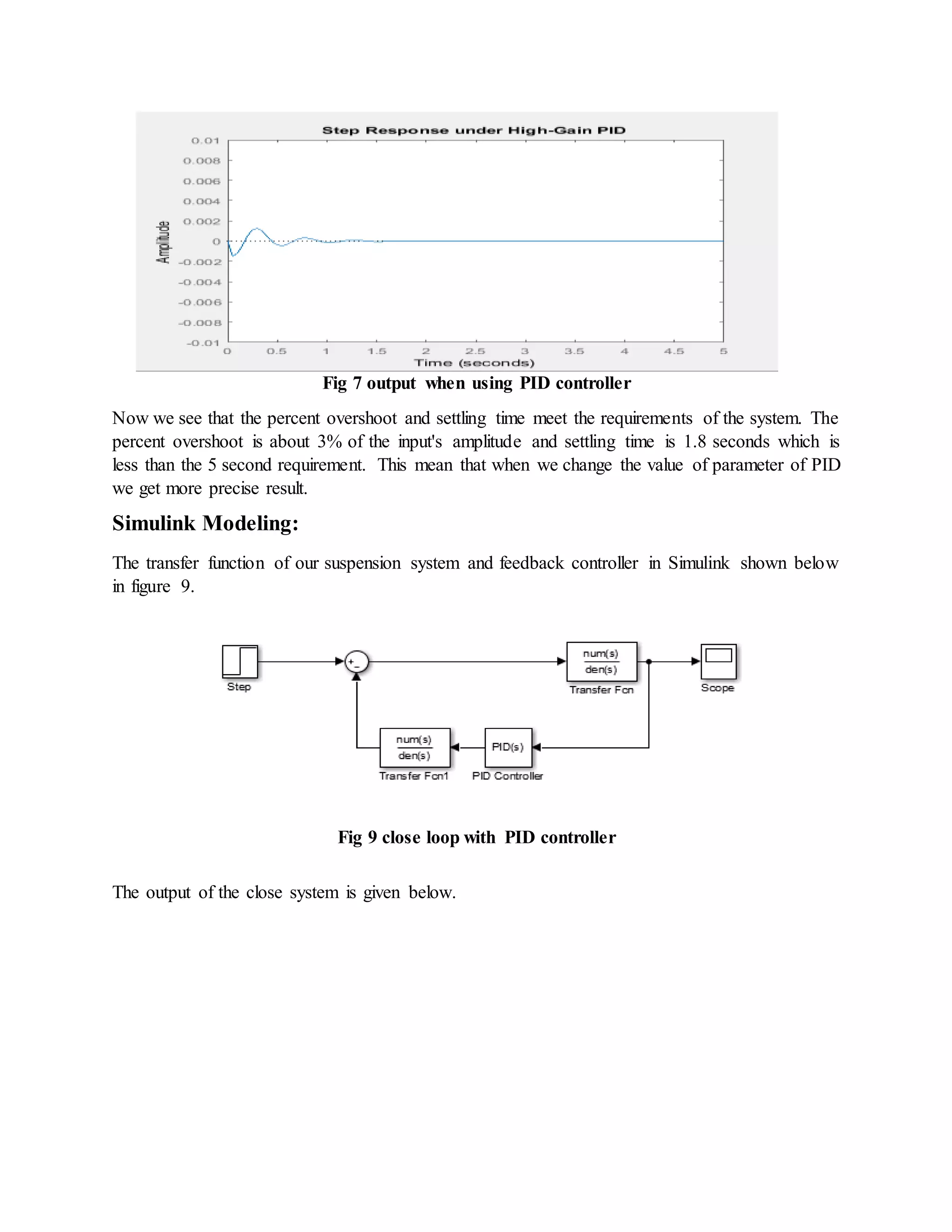
title('Step Response under High-Gain PID')
axis([0 5 -.01 .01])
Results:
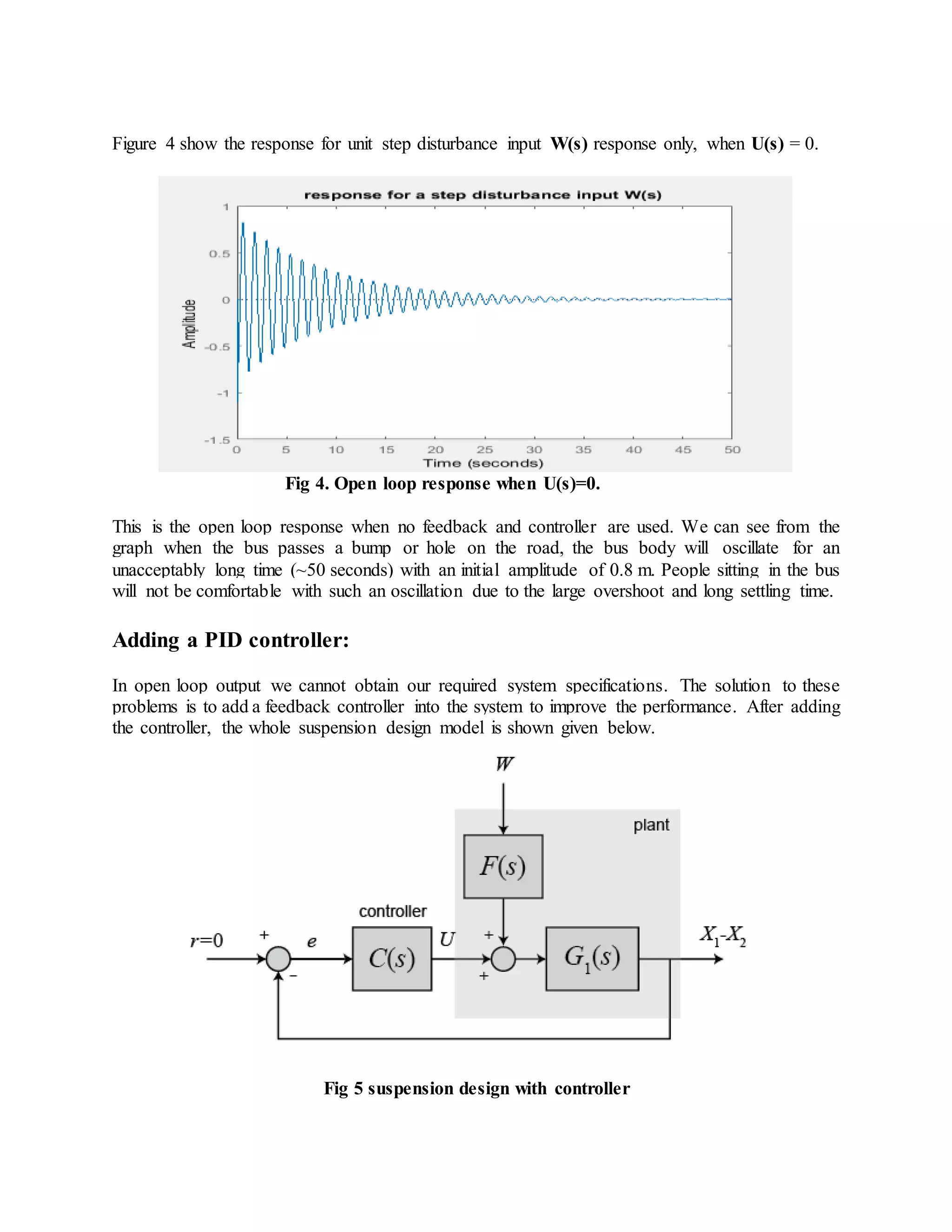
Figure 3 show the response of unit step actuated input U(s) only, when W(s) = 0.
Fig 3. Open loop response when W(s)=0.
This is the open loop response when no feedback and controller are used. From the graph of the
open-loop response for a unit step actuated force, we can see that the system is under-damped.
People sitting in the bus will feel very small amount of oscillation. Moreover, the bus takes an
unacceptably long time to reach the steady state (the settling time is very large).](https://image.slidesharecdn.com/mathreport-180121073823/75/suspension-system-project-report-7-2048.jpg)

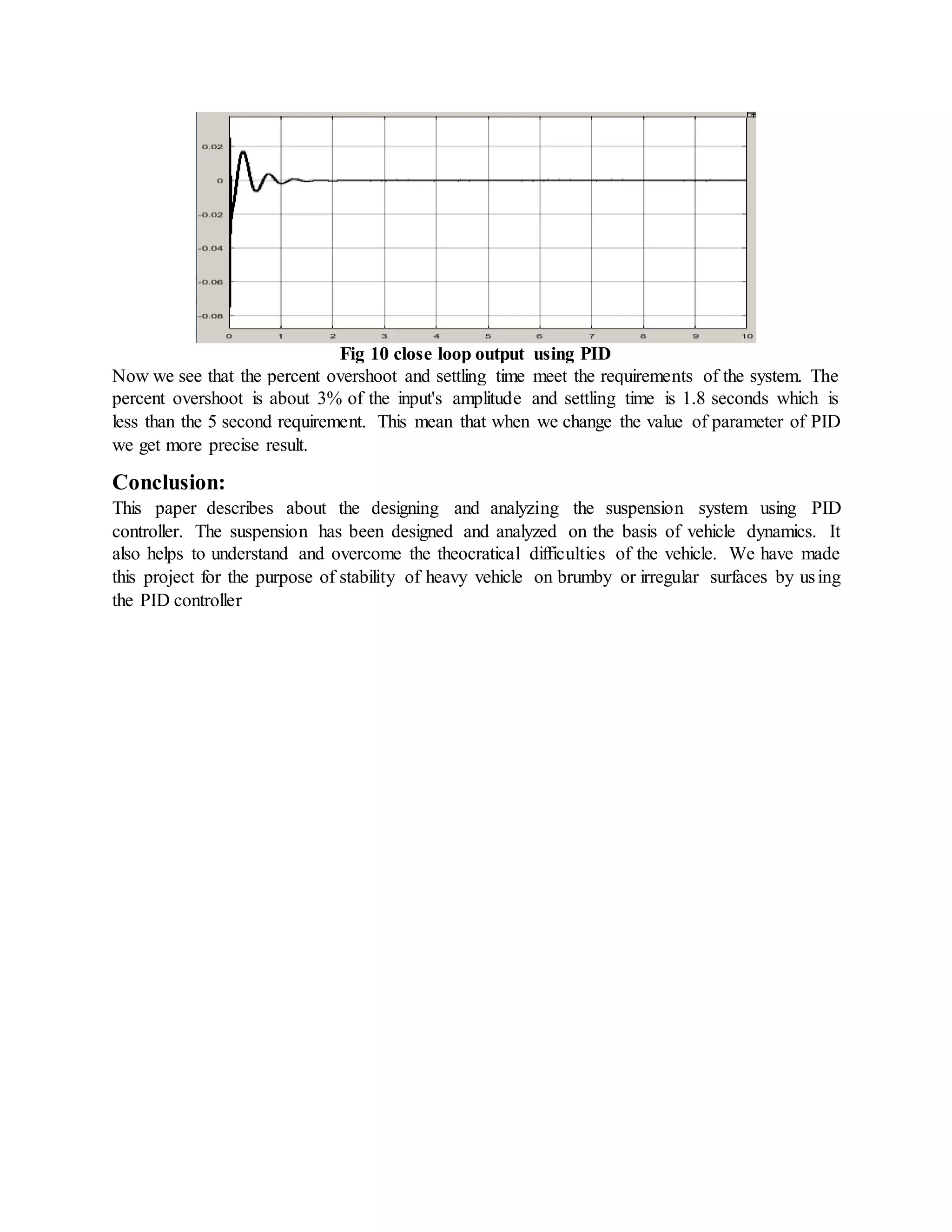

This document describes a suspension system model for a heavy vehicle and the design of an active suspension controller. The model includes two masses connected by a spring and damper to represent the vehicle body and wheel. Transfer functions are derived relating the output displacement to control input and road disturbance. Simulation in MATLAB shows the open-loop system has an unacceptable overshoot and settling time. A PID controller is designed and tested, showing improved but still not ideal performance. Gains are increased further resulting in a system meeting requirements of less than 5% overshoot and 5 second settling time.



































































