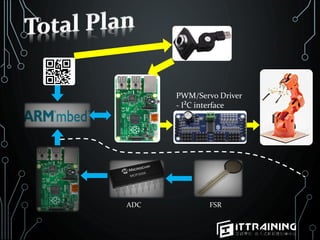
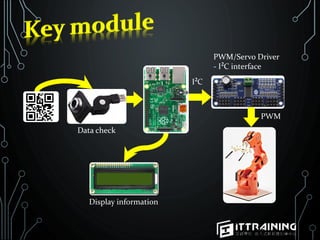
该文档探讨了智能机械手臂在物流中的应用,包括伺服马达控制原理、I2C接口及PWM信号的使用。文中详细描述了控制器如何处理反馈信号以实现物体抓取及运动分析,并提供了相关技术资源和链接以便进一步学习。整体内容侧重于硬件接口和软件实现的结合。