Download to read offline













![Design and implementation of an integrated and modular system for 3D position
calculation of a moving object using heterogeneous sensors and filters
01/04/2024
Fusion Methods
Lab Coordinates Outputs
of N Localization Methods
[ Xi Yi Zi vxi vyi vzi ], i = 1, 2 …
N
Kalman FIlter
k-Means
Weighted Average
Median
Selected Fusion Method by
user
Fused Estimation Output
[ Xf Yf Zf vxf vyf vzf ]
If N = 1, Fusion
process is skipped
We can implement a
“weighted” kalman filter by
adjusting its matrices
correspondingly
8](https://image.slidesharecdn.com/palightthesispresentation-241104105133-612dd92c/85/slide-15-320.jpg)

![Design and implementation of an integrated and modular system for 3D position
calculation of a moving object using heterogeneous sensors and filters
01/04/2024
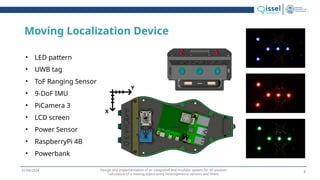
Moving Device - Visual Odometry
Capture two sequential frames
[Ft], [Ft+1] and undistort them
Detect features on Ft
Track those features to Ft+1
Compute the Essential Matrix
Estimate
Rotation matrices &
Translation vectors
Extract X, Y, Z
World Coordinates
11
Relative
Position (!)](https://image.slidesharecdn.com/palightthesispresentation-241104105133-612dd92c/85/slide-18-320.jpg)




















The document outlines the design and implementation of a modular system for 3D position calculation of a moving object using various sensors and filtering methods. It details the objectives, methodologies, and outcomes of experiments conducted to validate the system's performance, highlighting the effectiveness of different localization techniques. Future implications and potential improvements for the system are also discussed, emphasizing integration with additional technologies and optimization of processes.














![wronski_ugthesis[1]](https://cdn.slidesharecdn.com/ss_thumbnails/95db93fc-5f15-4802-985f-832034d277d7-150202014804-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)










![6 [progress report] for this leisurely side-project I was doing in 2016](https://cdn.slidesharecdn.com/ss_thumbnails/6progressreportforthisleisurelyside-projectiwasdoingin2016-210110122806-thumbnail.jpg?width=640&height=640&fit=bounds)








































