Download to read offline
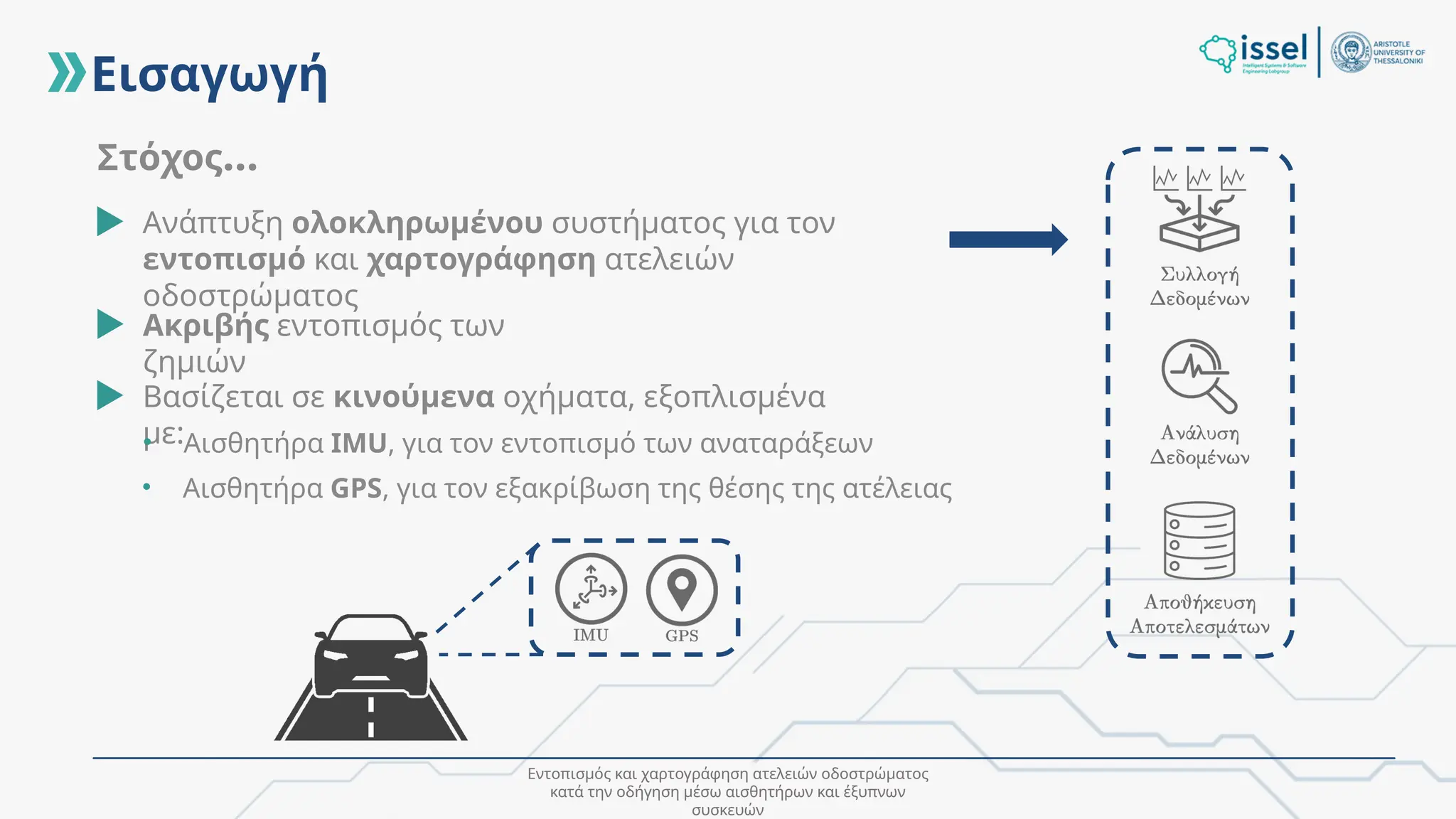
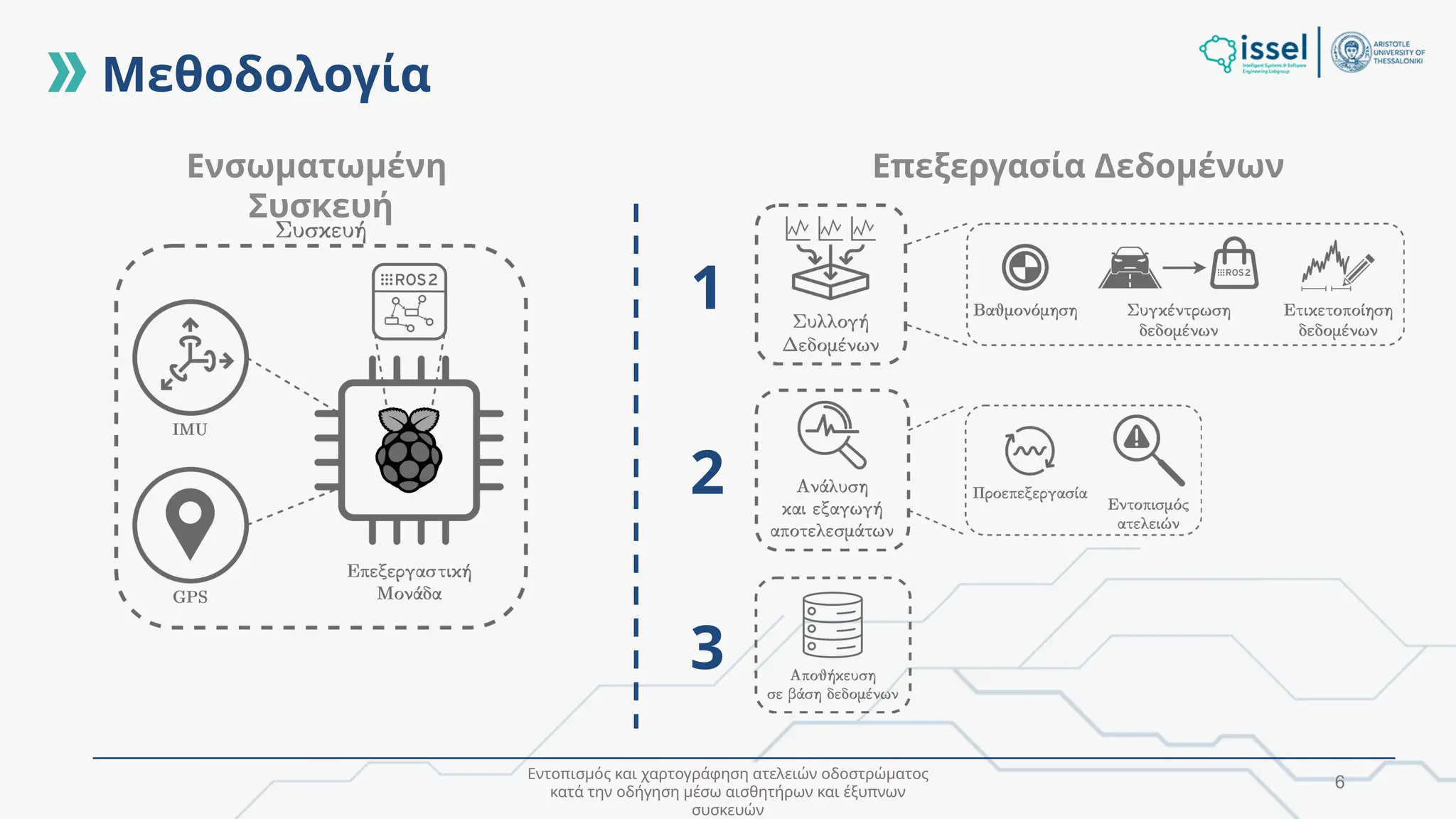

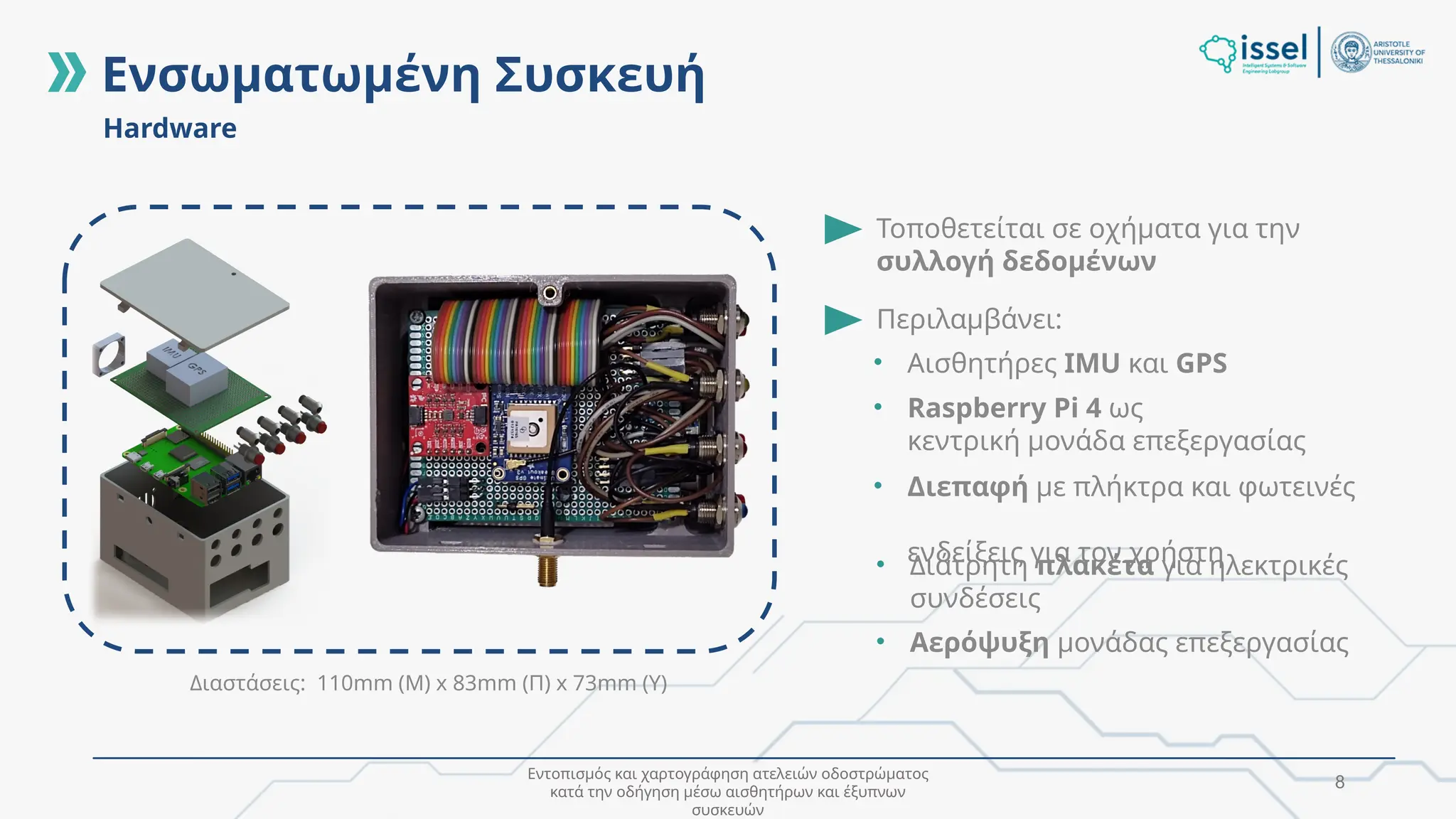
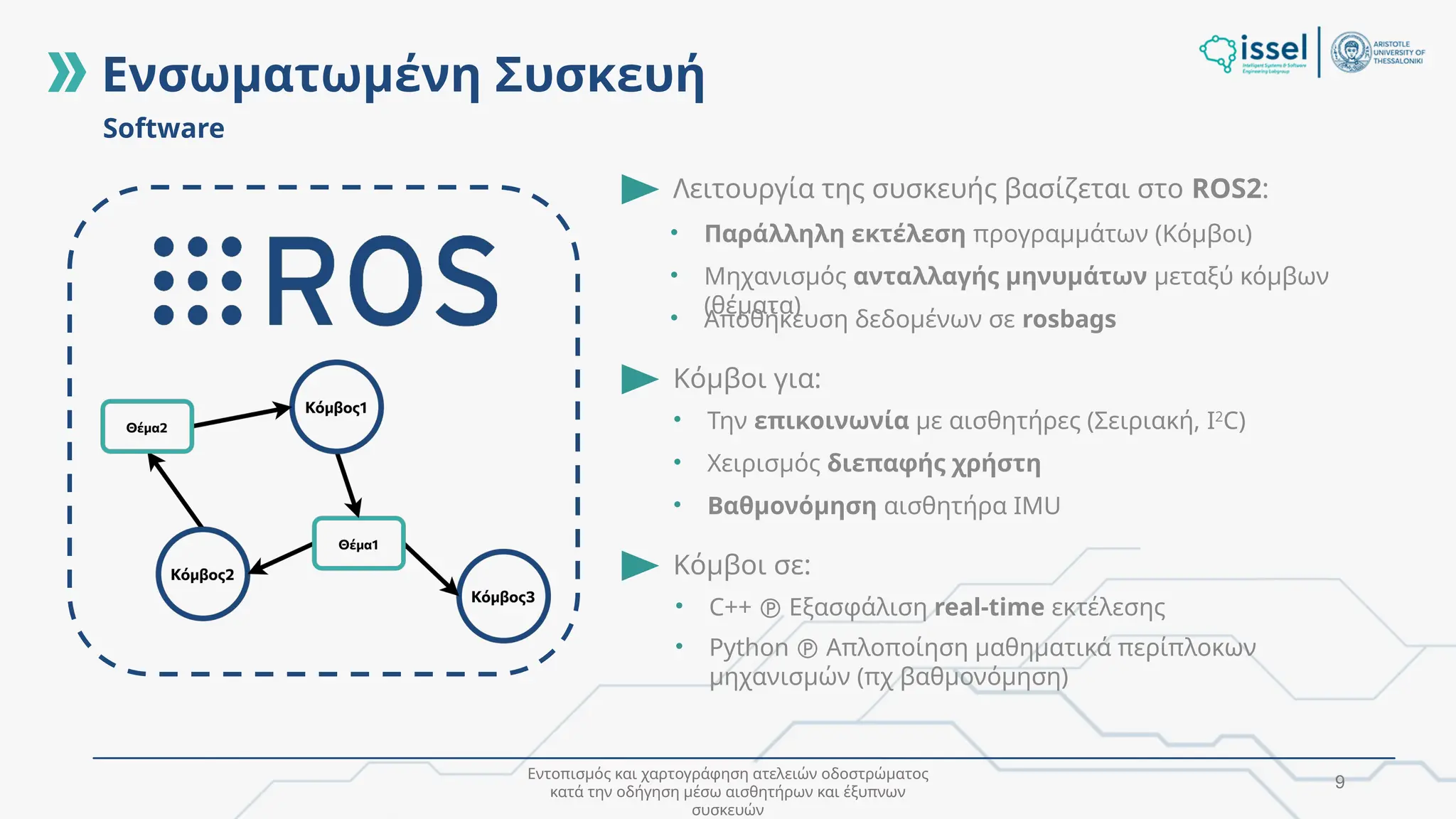
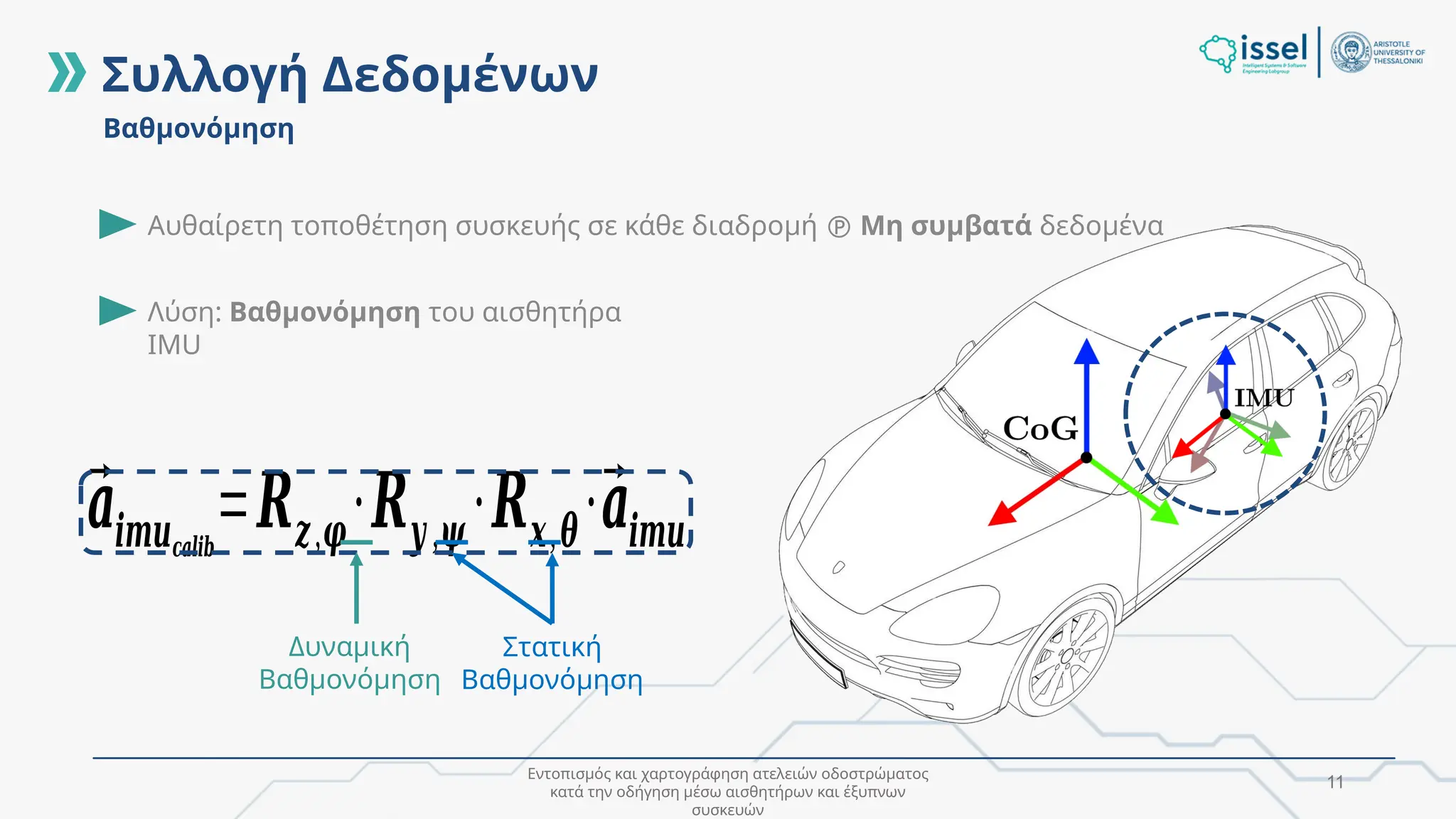
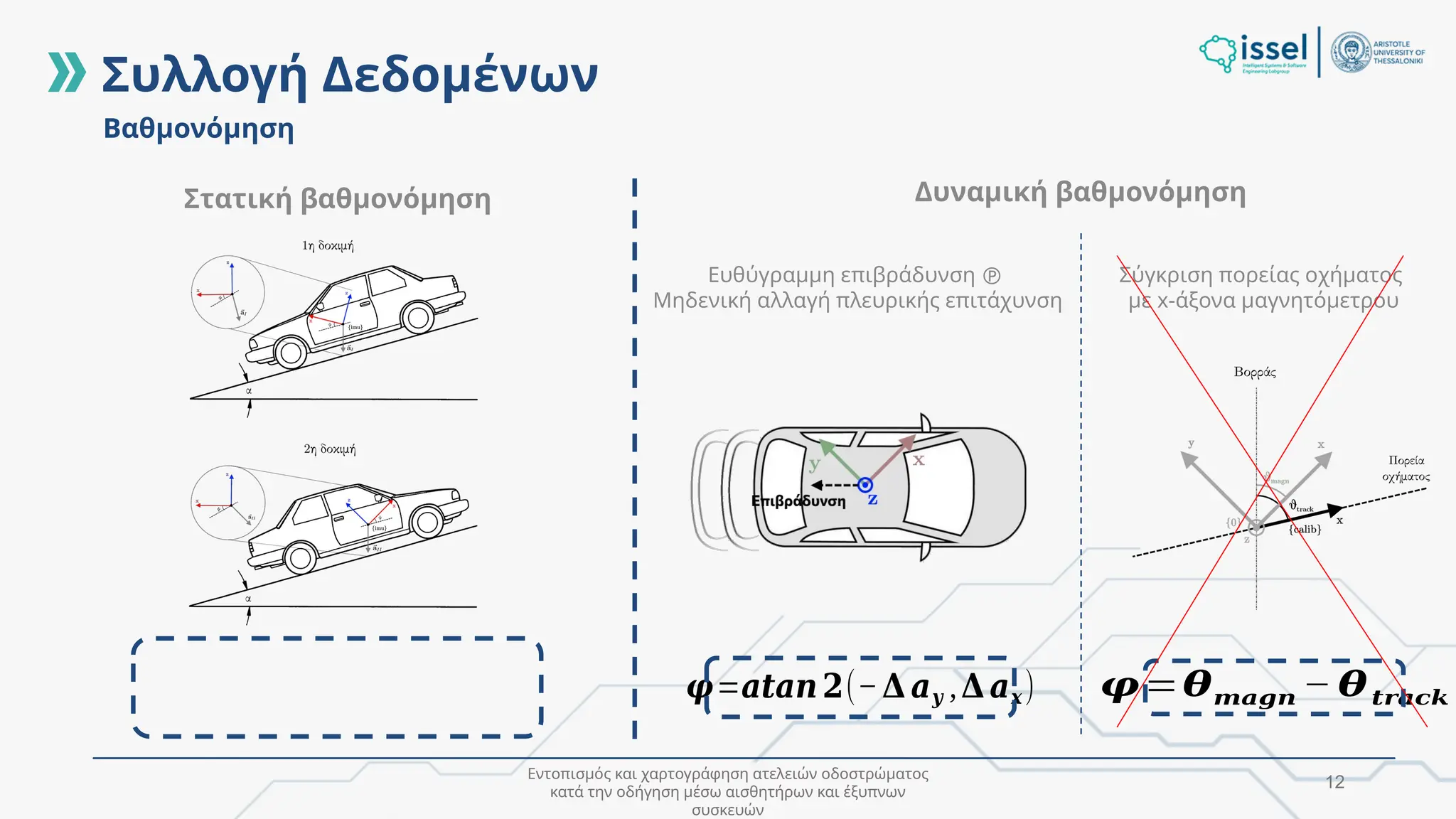

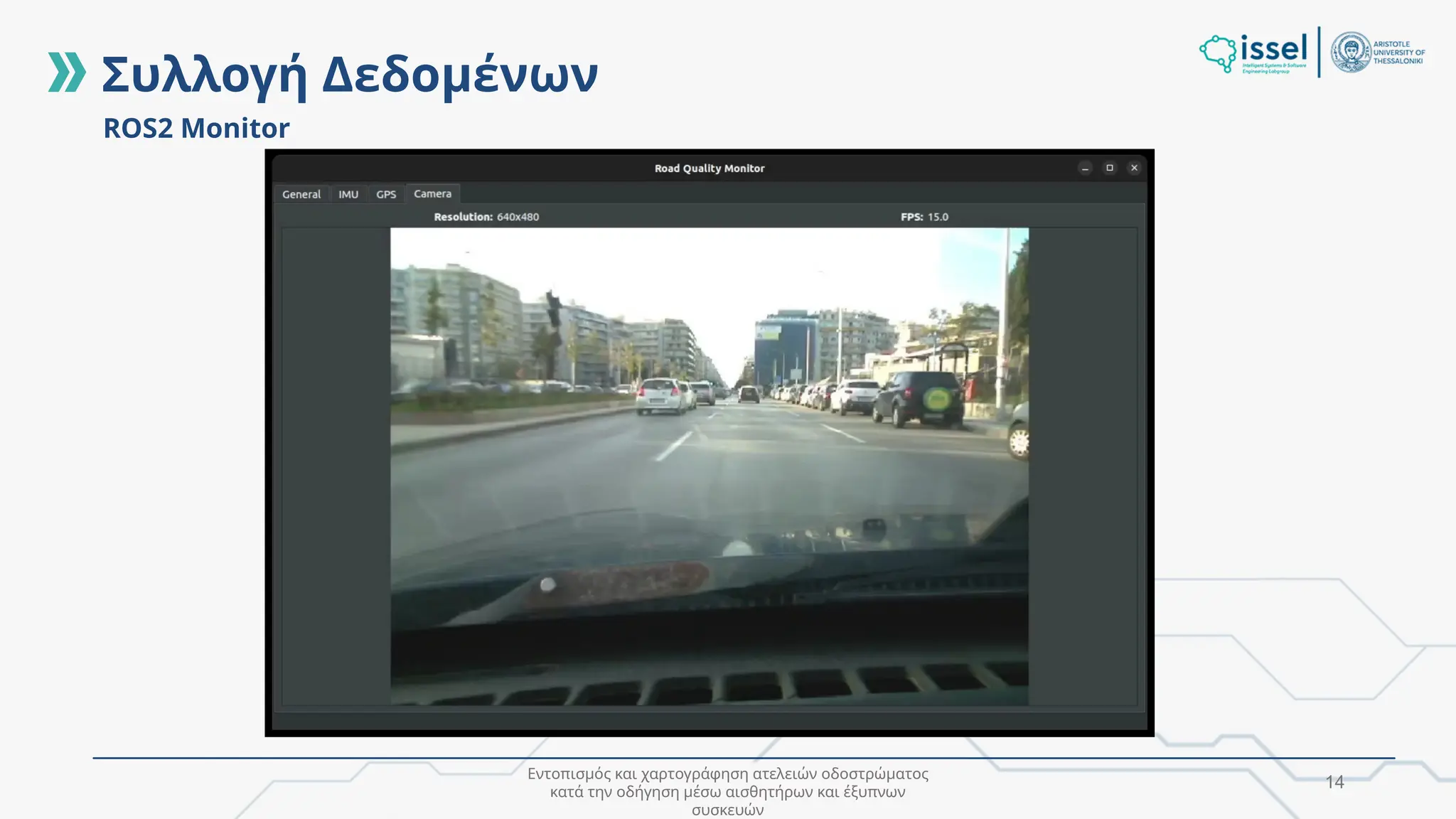
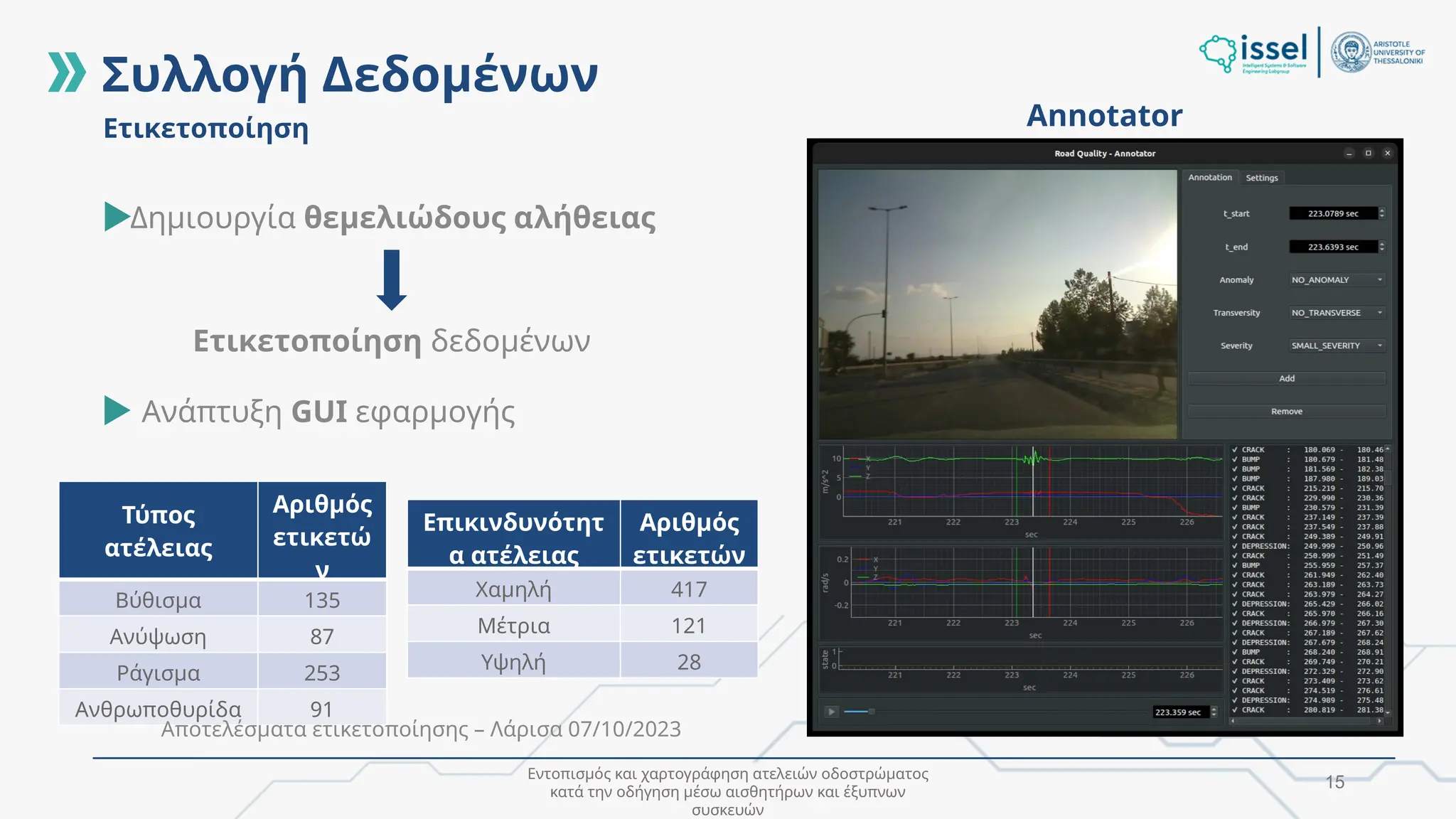
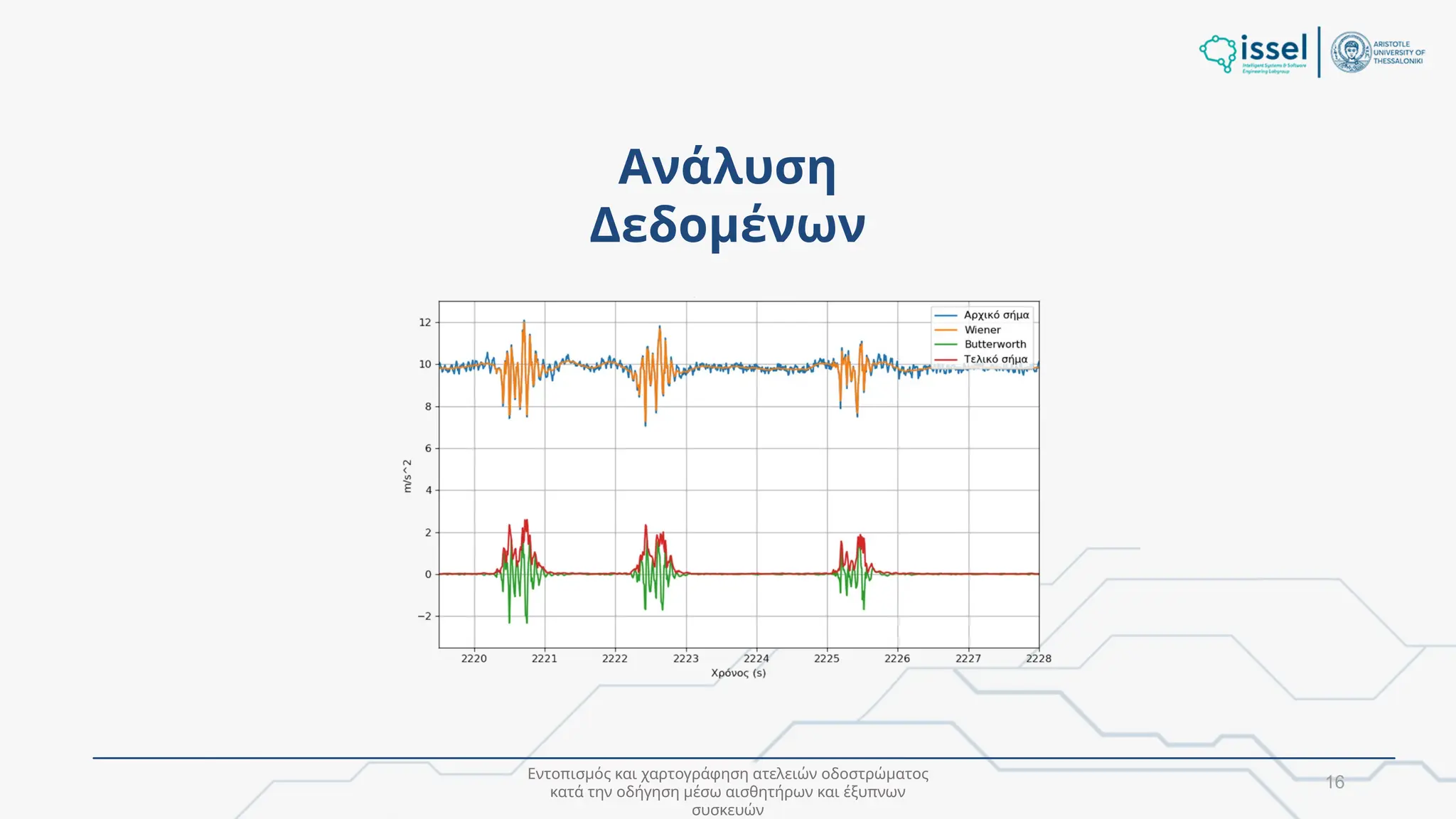
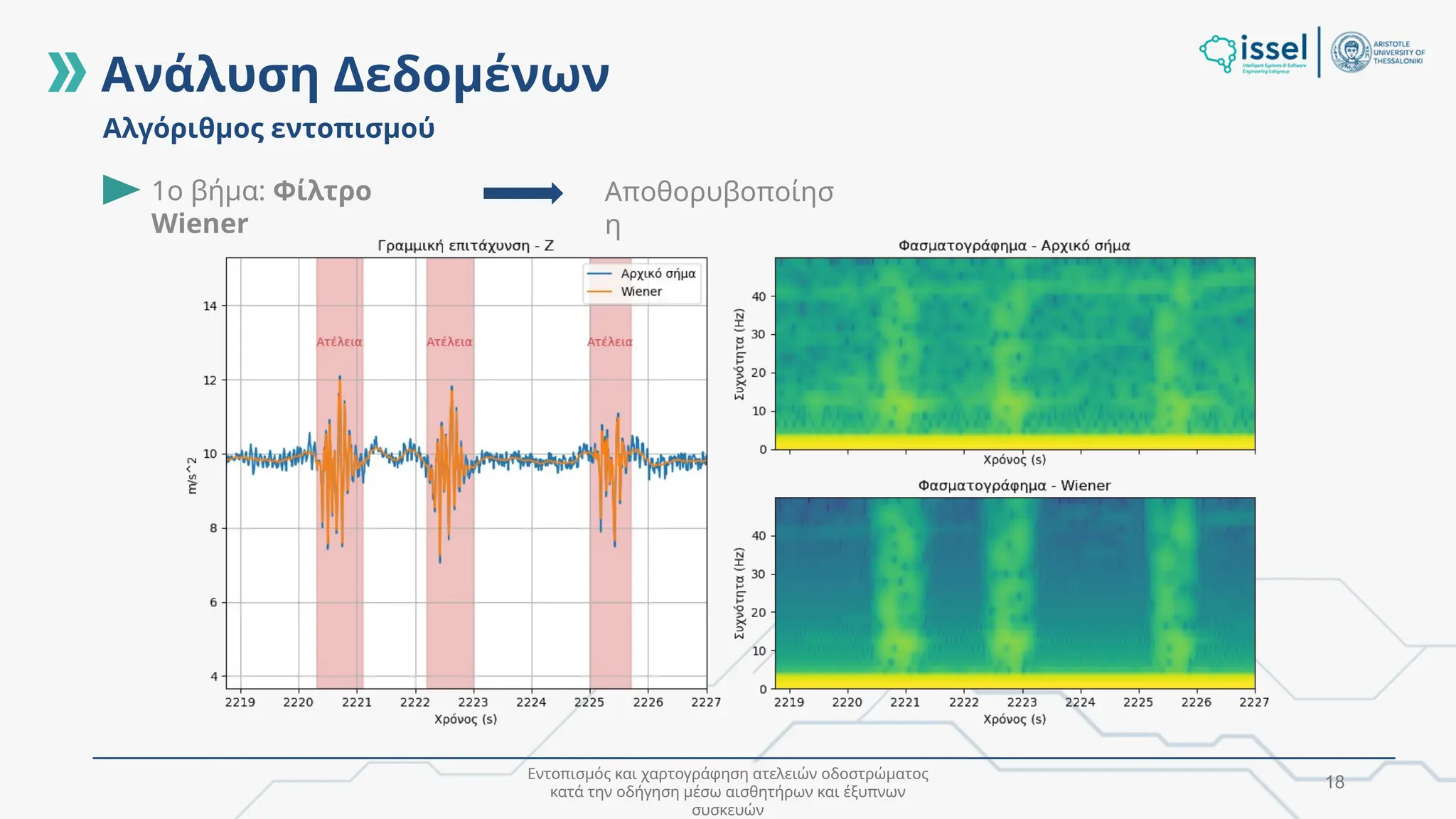
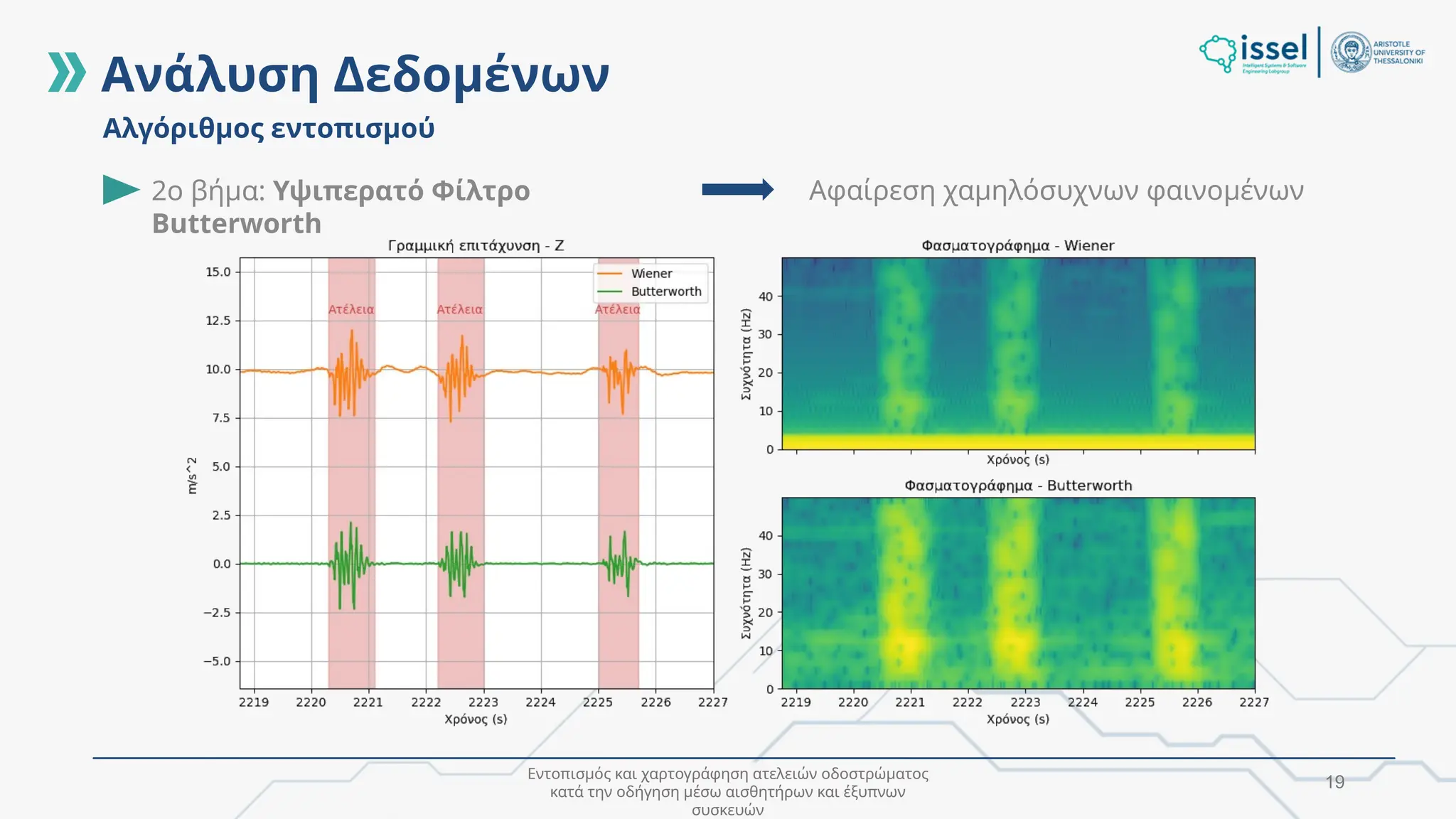
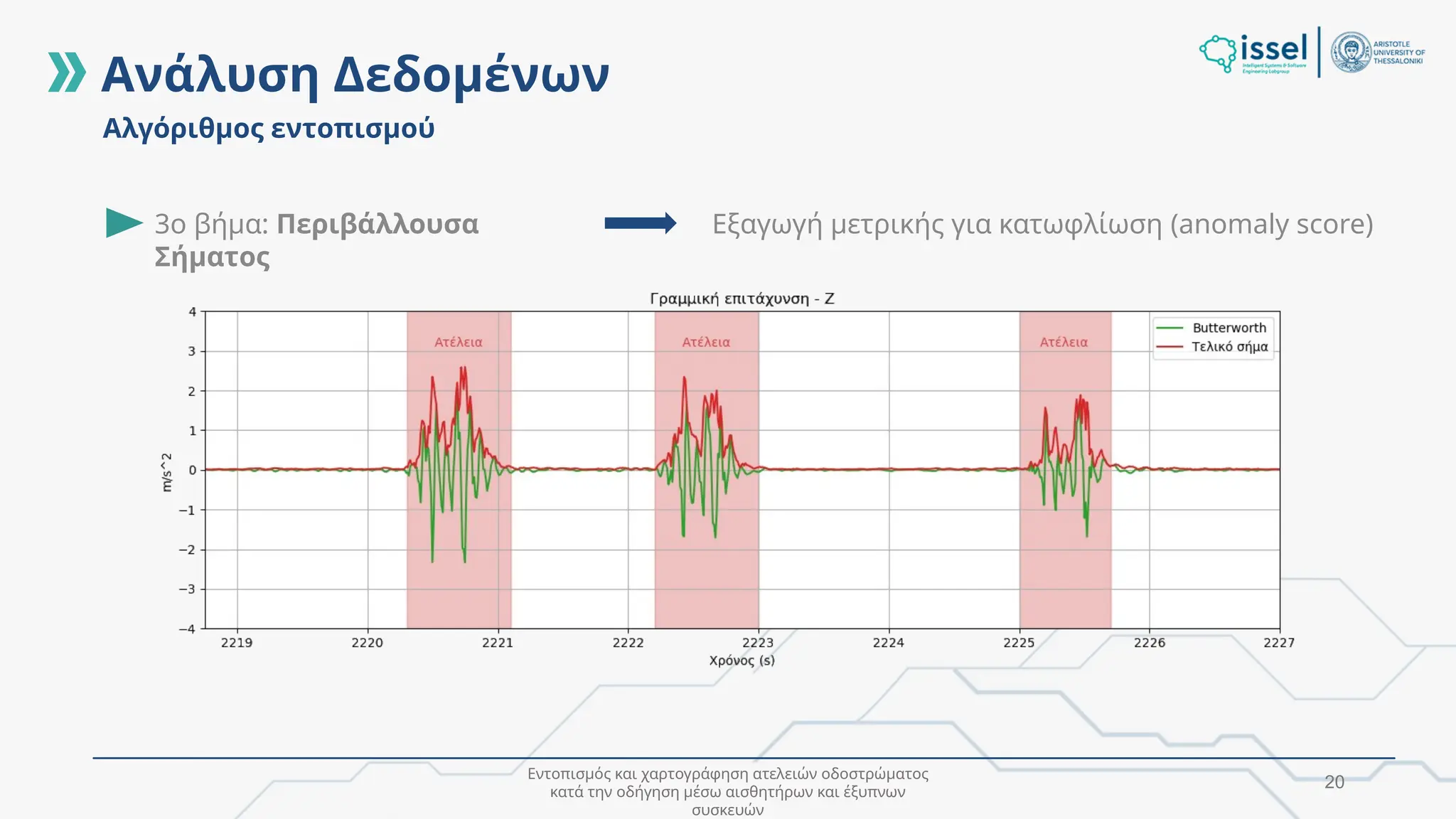
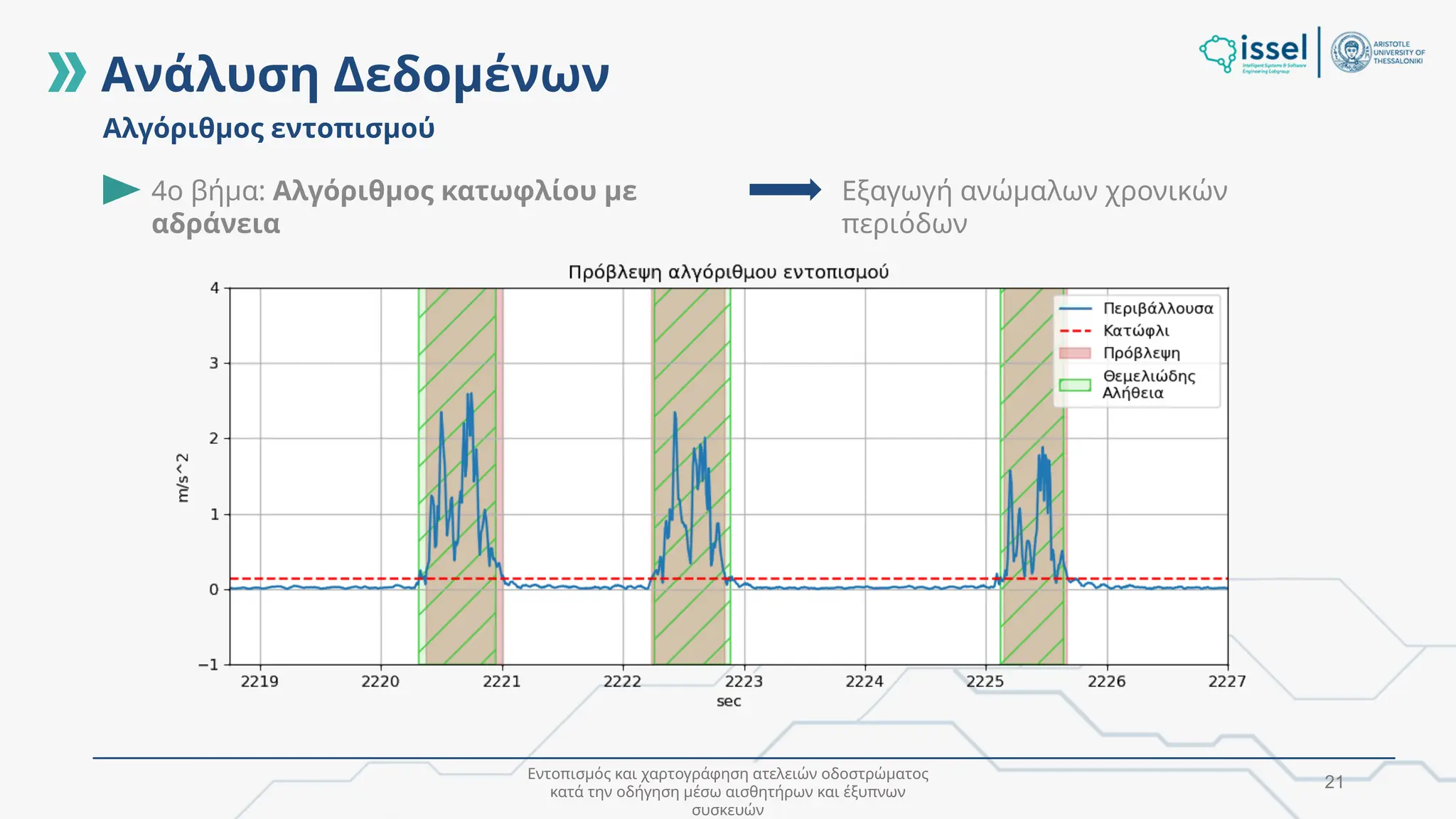
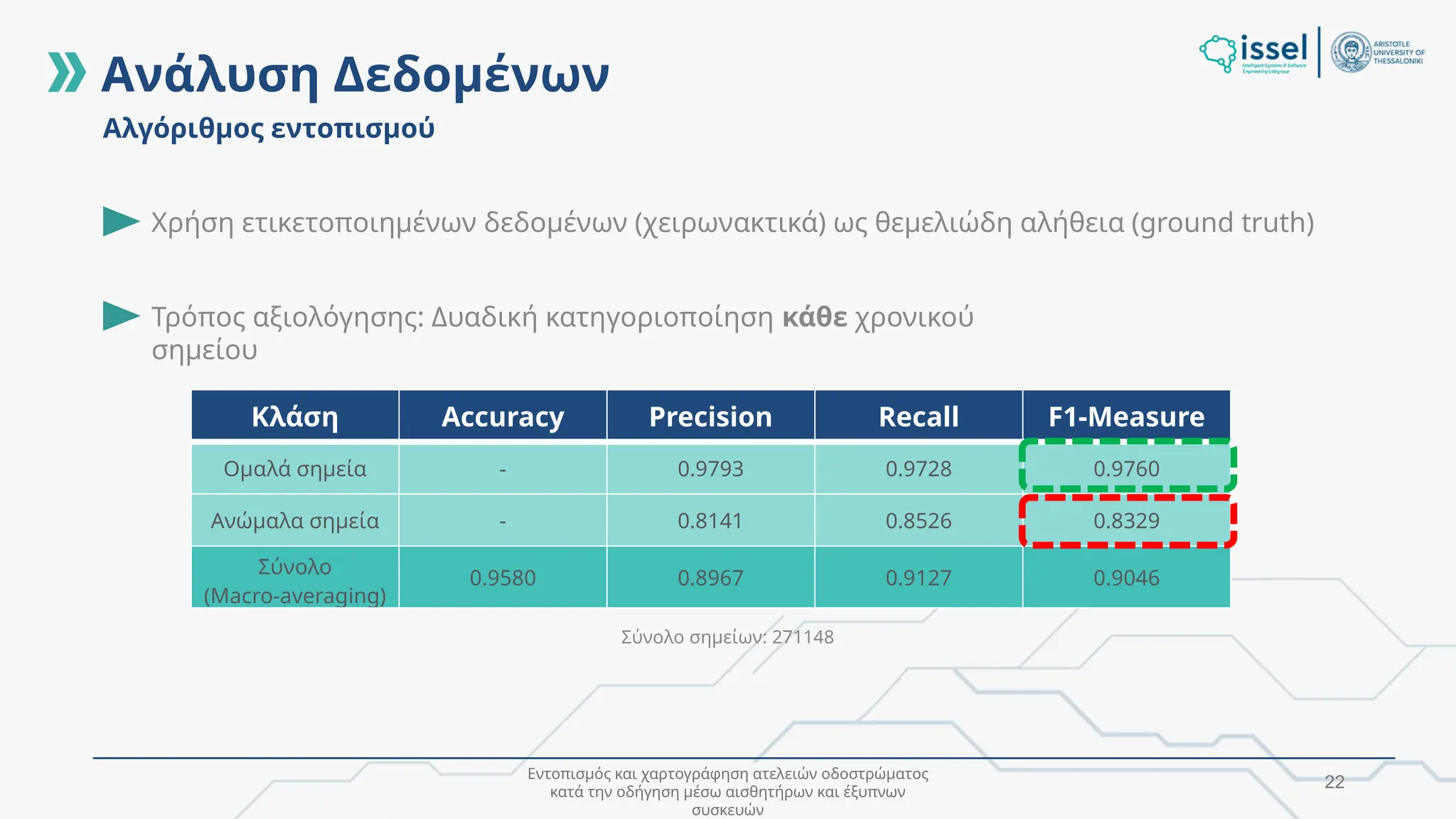

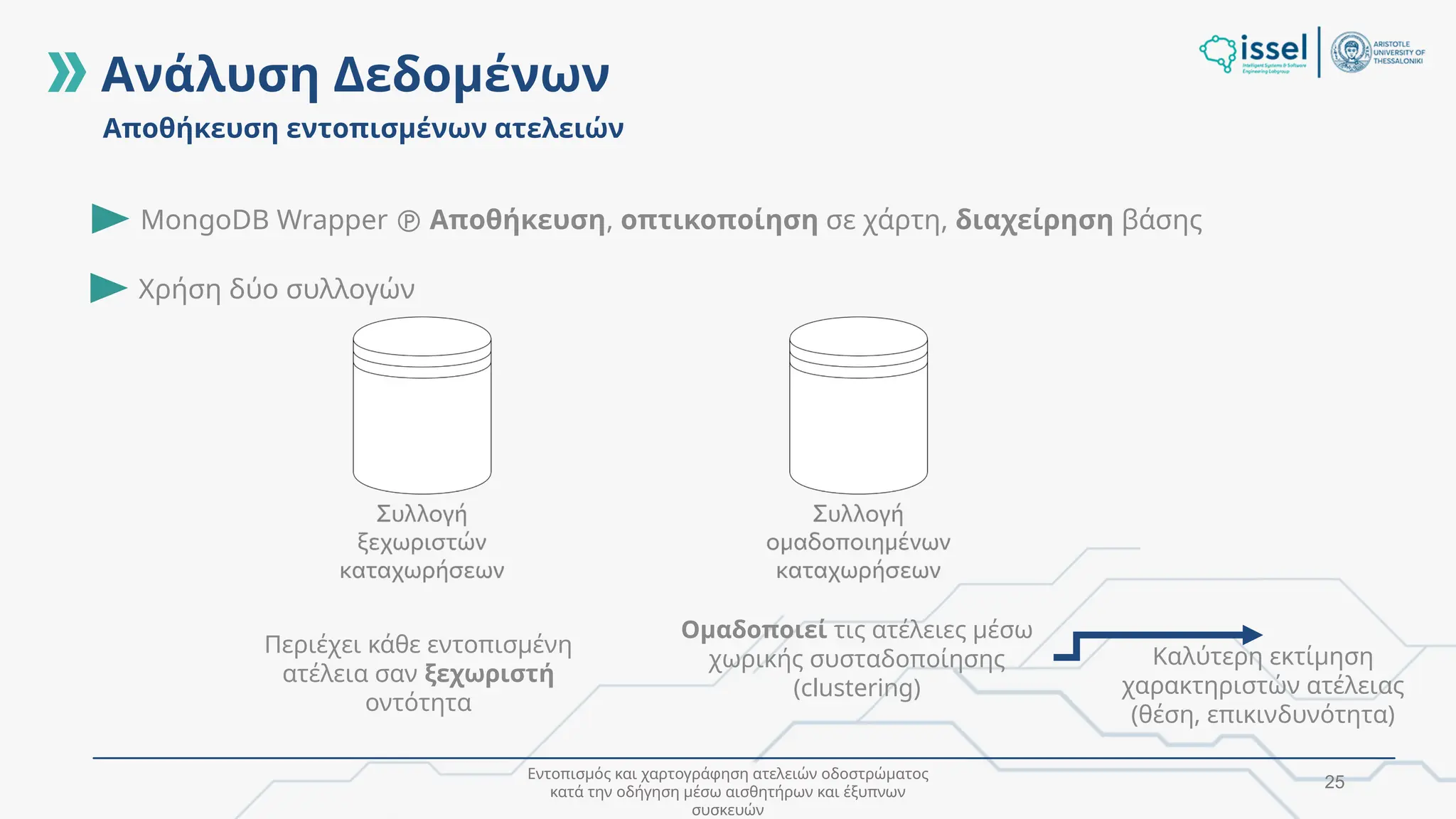

Ένα καλά αναπτυγμένο οδικό δίκτυο είναι απαραίτητο για την αποδοτική μεταφορά ανθρώπων και αγαθών. Συνεπώς, η συντήρηση των δρόμων είναι ύψιστης σημασίας για τη διασφάλιση της λειτουργίας τους και για την οικονομική και κοινωνική ευημερία που υποστηρίζουν. Απαραίτητη προϋπόθεση για τη βέλτιστη κατανομή των πόρων συντήρησης είναι η χαρτογράφηση της κατάστασης του οδοστρώματος. Στην παρούσα εργασία παρουσιάζεται ένα ολοκληρωμένο σύστημα εντοπισμού ζημιών στην επιφάνεια των δρόμων. Στηρίζεται στις δονήσεις που δέχεται ένα κινούμενο όχημα τη στιγμή που διέρχεται από μία ατέλεια στο οδόστρωμα. Οι δονήσεις γίνονται αντιληπτές μέσω μιας μονάδας μέτρησης αδράνειας (IMU), ενώ με την χρήση αισθητήρα GPS εξακριβώνεται η γεωγραφική θέση της ζημιάς. Το σύστημα βασίζεται σε μια ενσωματωμένη συσκευή που σχεδιάστηκε στα πλαίσια της εργασίας και χρησιμοποιήθηκε σε πραγματικές συνθήκες για τη συλλογή δεδομένων και τη διεξαγωγή πειραμάτων. Για την ανάπτυξη του λογισμικού της, χρησιμοποιήθηκε το μεσολογισμικό ROS2. Η υλοποίηση αντιμετωπίζει διάφορες προκλήσεις ενός πραγματικού σεναρίου, όπως την ύπαρξη θορύβου στα σήματα των αισθητήρων και τον τυχαίο προσανατολισμό με τον οποίο τοποθετείται η συσκευή στα οχήματα. Μια ευρετική αλγοριθμική προσέγγιση αναπτύχθηκε για τον εντοπισμό των ατελειών του οδοστρώματος μέσω των μετρήσεων της αδράνειας. Η ανάλυση σε ετικετοποιημένα δεδομένα έδειξε ότι επιτυγχάνεται σκορ ≈ 0.83 στην μετρική F1-Measure για τον εντοπισμό των ανώμαλων σημείων στο σήμα. Τέλος, παρουσιάζεται μια λογική αποθήκευσης των ζημιών σε βάση δεδομένων που συσταδοποιεί τις καταχωρήσεις για την εξαγωγή καλύτερης εκτίμησης των χαρακτηριστικών μιας ατέλειας που συναντάται παραπάνω από μια φορά στα δεδομένα.