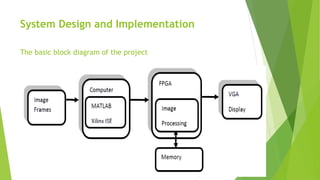
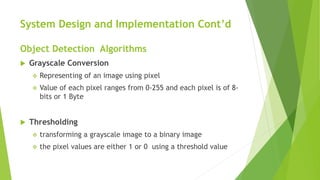
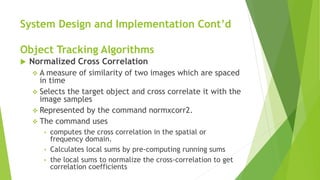
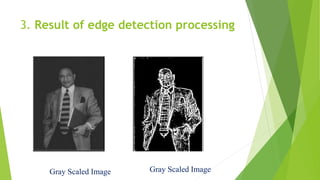
This document outlines a project to implement object detection and tracking using an FPGA-based distributed camera system. It discusses the motivation, objectives, and scope of the project. The system design uses image processing algorithms like grayscale conversion, thresholding, and edge detection for object detection, and normalized cross correlation for object tracking. The document presents results from MATLAB simulations demonstrating these algorithms and discusses implementing the system on an FPGA for real-time tracking. Future work includes connecting modules, behavioral analysis, and a user interface.







![Background and related work
Many hardware architectures for visual sensors network have been
proposed [3]. Most existing platforms are based on General Purpose
Processor (GPP) units [4] because this kind of architectures offers high
level programming and modern embedded processors provide good
performances. Despite this, embedded processors cannot meet real-time
processing constraints when image sensor resolution increases. On the
other side, FPGA-based architectures which offering more massive
computing capability than GPPs have been studied for implementing
image processing applications on smart camera nodes [1, 5]. However, if
the introduction of FPGAs can address some performance issues in smart
camera networks, it introduces new challenges concerning
programmability of nodes, hardware abstraction and network
management. This work presents a FPGA-based platform offering high
capacity for image processing, and also it is fully configurable and
updateable [2].](https://image.slidesharecdn.com/presentationforminproject-170205133431/85/Presentation-for-min-project-9-320.jpg)









![References
[1] Ece.rice.edu, ‘Distributed Smart Cameras’, 2013. [Online]. Available:
http://www.ece.rice.edu/~av21/Documents/pre2011/Distributed%20Smart%20Cameras.pdf
[Accessed: 29-October- 2016].
[2] Techtarget.com, ‘field-programmable gate array (FPGA)’, 2014. [Online]. Available:
http://whatis.techtarget.com/definition/field-programmable-gate-array-FPGA [Accessed:
29-October- 2016].
[3] W. W. B. Rinner, Towards Pervasive Smart Camera Networks. Academic press, 2009.
[4] P. Chen, P. Ahammad, C. Boyer, S.-I. Huang, L. Lin, E. Lobaton, M. Meingast, S. Oh, S.
Wang, P. Yan, A. Yang, C. Yeo, L.-C. Chang, J. D. Tygar, and S. Sastry, “Citric: A low-
bandwidth wireless camera network platform,” in Distributed Smart Cameras, 2008. Second
ACM/IEEE International Conference on, 2008.
[5] E. Norouznezhad, A. Bigdeli, A. Postula, and B. Lovell, “A high resolution smart camera
with gige vision extension for surveillance applications,” in Distributed Smart Cameras,
2008. ICES 2008. Second ACM/IEEE International Conference on, 2008, pp. 1–8
[6]. Xilinx, MicroBlaze Processor Reference Guide, Embedded Development Kit EDK 14.6
URL: http://www.xilinx.com/support/documentation/sw_manuals/
xilinx14_6/mb_ref_guide.pdf](https://image.slidesharecdn.com/presentationforminproject-170205133431/85/Presentation-for-min-project-23-320.jpg)
![References Cont’d
[7].Xilinx, Embedded System Tools, Reference Manual, Embedded Development Kit URL:
https://www.xilinx.com/support/documentation/sw_manuals/edk10_est _rm.pdf
[8]. Xilinx, Application Note, “Using Block RAM in Spartan-3 Generation FPGAs”, XAPP463
(v2.0) March 1, 2005.
[9]. Xilinx, Application Note, “Digital Clock Manager (DCM) Module”, DS485 April 24,
2009.
[10]. Xilinx, “Spartan-3 FPGA Starter Kit Board User Guide”, UG230 (v1.2) January 20,
2011
[11]. Alper Yilmaz, “Object tracking: A survey”, University of Central Florida, ACM
Computing Surveys (CSUR) Surveys Homepage archive Volume 38 Issue 4, 2006
[12]. Rafael C. Gonzalez, Richard Eugene Woods, 2nd edition, “Digital Image processing”.
[13] Radi H.R., Caleb W.W.K., M.N.Shah Zainudin., M.Muzafar Ismail., “The Design and
Implementation of VGA Controller on FPGA”, University Teknikal Malaysia Melaka Hang
Tuah Jaya 76100 Durian Tunggal, Melaka, Malaysia.](https://image.slidesharecdn.com/presentationforminproject-170205133431/85/Presentation-for-min-project-24-320.jpg)