Downloaded 38 times




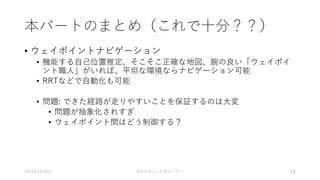
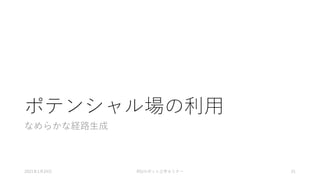
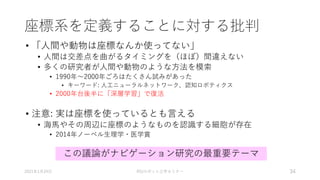
![ウェイポイント(のようなもの)を自動で置く
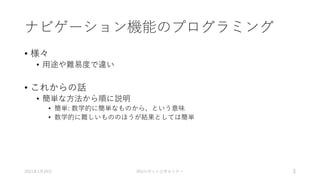
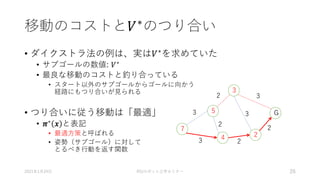
• Rapidly-Exploring Random Tree
(RRT)[LaValle 1998]
• ロボットが通れるところに枝を
伸ばしてゴールまでの経路を探索
• 右図: AtsushiSakai/PythonRobotics
のRRTのコードから生成
• ○高次元で有利
• マニピュレータの動作生成に用いられる
• 移動ロボットの場合は効果は限定的
• ×経路が折れ曲がる
• ×きわどい経路ができる
2021年1月24日 RSJロボット工学セミナー 12
スタート
ゴ
ー
ル
障
害
物](https://image.slidesharecdn.com/20210124rsjseminar-210124022620/85/slide-12-320.jpg)
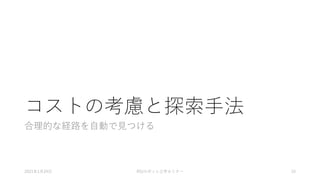

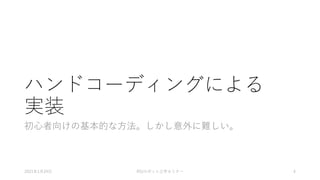
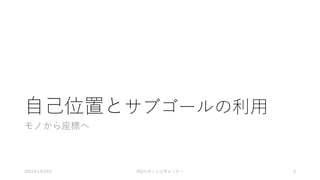
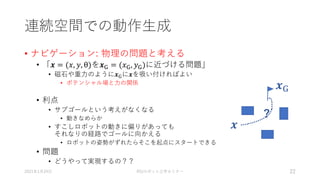
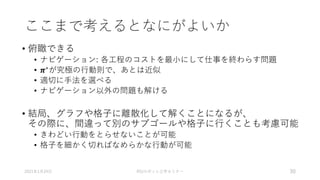
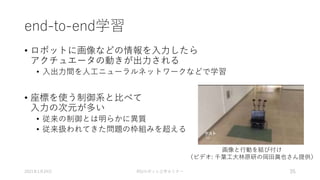
![ダイクストラ法[Dijkstra1959]
• ゴールから後ろ向きに距離を確定していく
2021年1月24日 RSJロボット工学セミナー 17
ゴールの手前のサブゴールのコストを計算
(最小の2となったノードはコスト確定)
G
G
S
3
2
3
3
2
2
2
2
3
3
S
3
2
5
4
3
3
2
2
2
2
3
3
コストが確定しているサブゴールに
隣接しているサブゴールのコスト計算
(最小の3になったノードはコスト確定)](https://image.slidesharecdn.com/20210124rsjseminar-210124022620/85/slide-17-320.jpg)

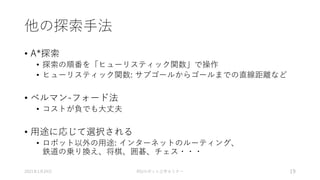
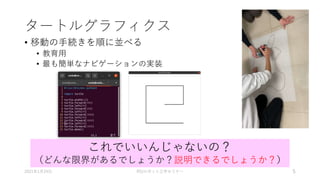
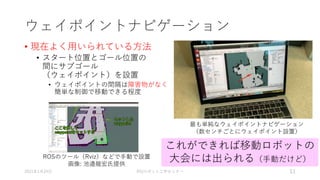
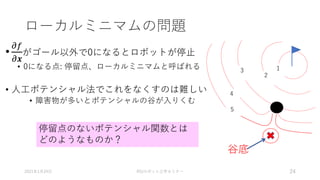
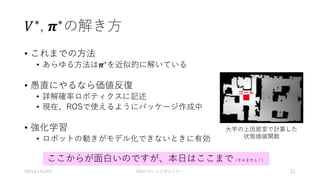
![人工ポテンシャル法
• 80年代に考案された方法
([Latombe 1991]などの教科書に記述)
• 世界座標系(空間)に、ゴールが底に
なるようなポテンシャル場を設置
• ヒューリスティック
• ロボットをポテンシャルが
落ちるように速度(下式の𝒗)を決定
2021年1月24日 RSJロボット工学セミナー 23
障害物
𝒗 = −α
𝜕𝑓
𝜕𝒙
1
2
3
4
𝑓
5
𝒗
これでOK?問題は?](https://image.slidesharecdn.com/20210124rsjseminar-210124022620/85/slide-23-320.jpg)






The document discusses various methods for robot navigation from simple to complex. It begins by explaining turtle graphics and sensor feedback methods. It then introduces using a coordinate system and estimating the robot's position to define waypoints and goals as coordinates. Commonly used waypoint navigation is explained along with automatic waypoint generation using RRT. Finally, it covers using graph searches like Dijkstra's algorithm and potential fields to optimize the path planning. The focus is on moving from object-based to coordinate-based representations and selecting rational routes.






















![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)



![SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts120220608ssiitransformerr2-220607054025-3adacf07-thumbnail.jpg?width=640&height=640&fit=bounds)








































