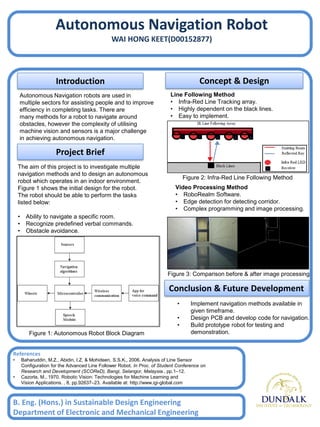
The document describes an autonomous navigation robot project. The aim of the project is to design a robot that can navigate autonomously within an indoor environment using different navigation methods. The robot needs to be able to navigate a specific room, recognize verbal commands, and avoid obstacles. Two navigation methods are discussed: an infrared line following method using a line tracking array, and a video processing method using edge detection in images to detect corridors and navigate. The conclusion discusses implementing the navigation methods, building a prototype robot, and testing and demonstrating it.