







![本走行/全実験走行での到達距離 [m]
12
つくばチャレンジ2019シンポジウム 2020-01-11
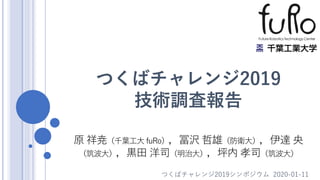
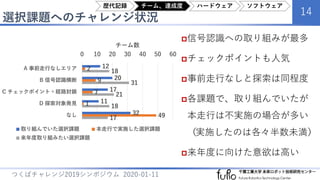
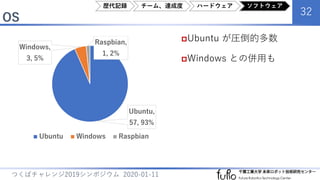
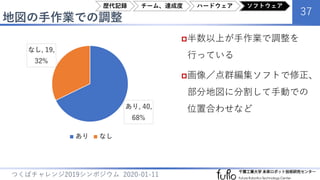
チームによって経路が違う
ため、完走でも距離は異なる
約 600 m を超えられれば、
完走が近い?(2018も同様)
本走行で約 200 m でも、実験
走行はそれ以上に到達できて
いる様子(2018も同様)
7
24
10
8
0
3
1 0 1 0
2 2
0 12
12 12
8
1
5
0 1
5
0
5
7
0 1
0
10
20
30
チーム数
到達距離 [m]
本走行 全実験走行
歴代記録 チーム、達成度 ハードウェア ソフトウェア](https://image.slidesharecdn.com/tc2019-survey-200212095719/85/2019-13-320.jpg)
![全実験走行での自律走行距離の合計 [km]
13
つくばチャレンジ2019シンポジウム 2020-01-11
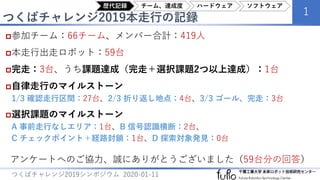
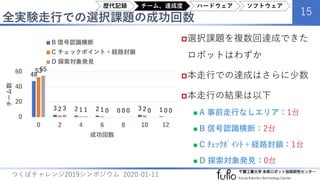
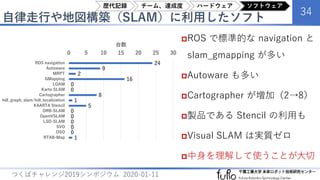
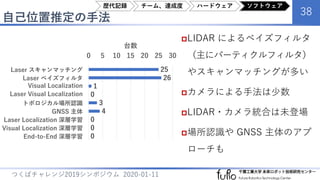
自律走行できているチームは、
数十 km の実機テストを実施
(全8回の実験走行日で)
それでも本走行では約 2.5 km
のコースを完走できない
36
13
3 4
2 1
0
10
20
30
40
5 10 15 20 25 30
チーム数
全実験走行での自律走行距離の合計 [km]
歴代記録 チーム、達成度 ハードウェア ソフトウェア](https://image.slidesharecdn.com/tc2019-survey-200212095719/85/2019-14-320.jpg)
![ロボットのサイズ(全長、全幅、全高)
18
つくばチャレンジ2019シンポジウム 2020-01-11
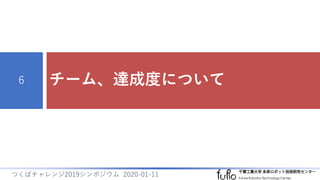
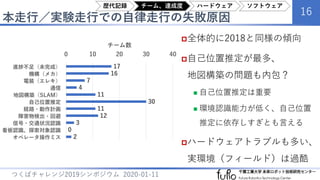
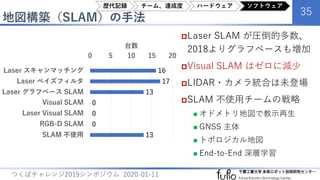
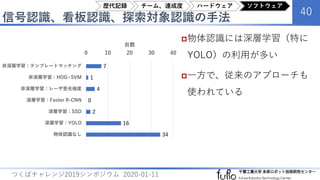
ロボット仕様条件
全長:1.2 m 以下
全幅:0.75 m 以下
全高:0.6 m 以上、1.5 m 以下
全高のみ低い方に偏りがある
0 0
2
0
4
11
9
10
11
4
5
3
0
2
4
6
8
10
12
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2
台数
全長 [m]
0 0 1
4
15
20
13
6
0
5
10
15
20
25
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
台数
全幅 [m]
16
8
6
5 5
6
5
4 4
0
5
10
15
20
0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5
台数
全高 [m]
歴代記録 チーム、達成度 ハードウェア ソフトウェア](https://image.slidesharecdn.com/tc2019-survey-200212095719/85/2019-19-320.jpg)
![ロボットの重量
19
つくばチャレンジ2019シンポジウム 2020-01-11
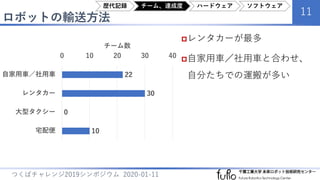
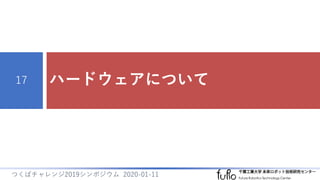
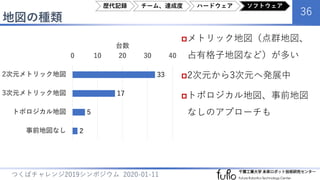
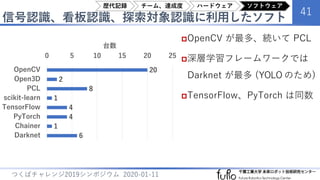
ロボット仕様条件
重量:100 kg 以下(60 kg 以下
を推奨)
推奨している 60 kg 以下の
ロボットが多い
安全確保のためには軽量で
あることが望ましい
2
7
11
12
4
9
5
2
4
3
0
5
10
15
10 20 30 40 50 60 70 80 90 100
台数
重量 [kg]
歴代記録 チーム、達成度 ハードウェア ソフトウェア](https://image.slidesharecdn.com/tc2019-survey-200212095719/85/2019-20-320.jpg)
![自律走行時の最高速度 [km/h]
20
つくばチャレンジ2019シンポジウム 2020-01-11
自律走行では 4 km/h が最多
4 km/h 超過は、リモコン走行
でのデータ取得時が多い様子
高速での安全確保のためには、
より高度な自律機能が必要
1 1 0
4
6 6
3
36
0 1 1 0
0
10
20
30
40
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
台数
自律走行時の最高速度 [km/h]
歴代記録 チーム、達成度 ハードウェア ソフトウェア](https://image.slidesharecdn.com/tc2019-survey-200212095719/85/2019-21-320.jpg)
![製作費 [万円]
21
つくばチャレンジ2019シンポジウム 2020-01-11
ロボット筐体、コンピュータ、
センサなど一式で約100~200
万円が多い
20万円以下の回答は誤り?
(PCなどで数十万円は必要)
14
7
8
4
10 10
3
1
0
1 1
0
5
10
15
20 40 60 80 100 200 300 400 500 600 700
台数
製作費 [万円]
歴代記録 チーム、達成度 ハードウェア ソフトウェア](https://image.slidesharecdn.com/tc2019-survey-200212095719/85/2019-22-320.jpg)





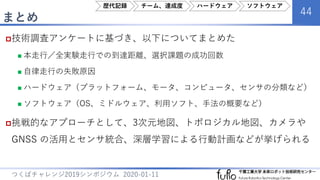

学術研究に役立った場合は、以下の論文を参考文献として引用して頂ければ幸いです。 Yoshitaka Hara, Tetsuo Tomizawa, Hisashi Date, Yoji Kuroda, and Takashi Tsubouchi: "Tsukuba Challenge 2019: Task Settings and Experimental Results", J. of Robotics and Mechatronics, vol. 32, no. 6, pp. 1104--1111, 2020. https://www.fujipress.jp/jrm/rb/robot003200061104/ つくばチャレンジ2019シンポジウム講演資料 https://tsukubachallenge.jp/2019/about/symposium



![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)








































