


![Численное моделирование
Приведём численное моделирование при следующих параметрах
и начальных условиях
Интегрирование проведено на временном промежутке
0 0( ) 2 , ( ) 0 / .t рад t рад с
[0,162] .t c
8
2
1 2 1 01 , 12 , 4 , 1 , 9,81 /m m кг l l м А м с b м g м с ](https://image.slidesharecdn.com/random-130619100905-phpapp02/85/slide-8-320.jpg)




![Численное моделирование
Приведём численное моделирование при следующих параметрах
и начальных условиях
Интегрирование проведено на временном промежутке
0 0( ) 0,25 , ( ) 0 / .t рад t рад с
[0,162] .t c
14
2
1 2 1 01 , 12 , 4 , 1 , 9,81 /m m кг l l м А м с b м g м с ](https://image.slidesharecdn.com/random-130619100905-phpapp02/85/slide-14-320.jpg)




![Список литературы
• Асланов В.С., Безгласный С.П. Устойчивость и неустойчивость
управляемых движений двухмассового маятника переменной
длины // Известия РАН. Механика твердого тела. 2012. № 3. С. 32-
46.
• Магнус К. Колебания [Текст]: Введение в исследование
колебательных систем./ К. Магнус. – М.:Мир, 1982. – 304 с.
• Чечурин С.Л. Параметрические колебания и устойчивость
периодического движения [Текст]/ С.Л. Чечурин. –Л.:Изд-во
ЛГУ,1983. – 219 с.
19](https://image.slidesharecdn.com/random-130619100905-phpapp02/85/slide-19-320.jpg)


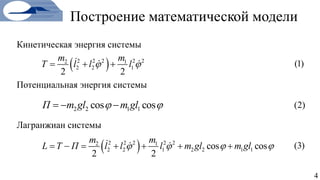
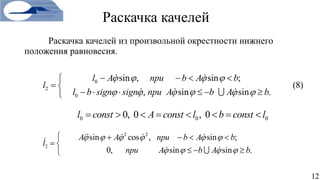
Документ описывает исследование параметрического управления движениями маятника переменной длины, включающее построение математической модели, выбор законов управления и численное моделирование. Основные задачи заключаются в иллюстрации движения маятника и обеспечении асимптотического успокоения колебаний. Результаты работы подтверждаются численными расчетами.