Download as PDF, PPTX




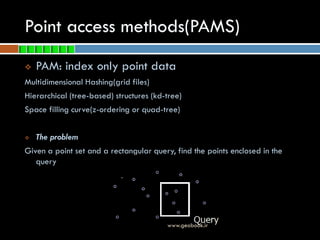
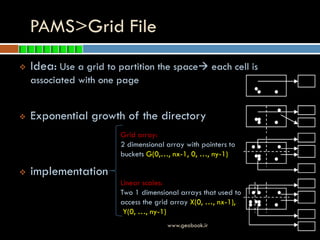











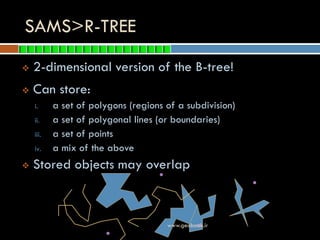







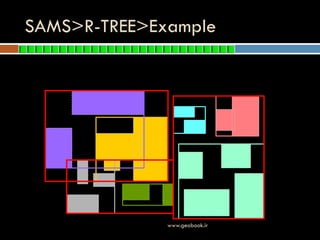














This document discusses spatial indexing methods for geographic data. It begins by defining indexes and their purpose for improving data access times. It then describes two main types of spatial indexes: point access methods (PAMs) like grid files, kd-trees, z-ordering, and B-trees; and spatial access methods (SAMs) like the R-tree. The document focuses on R-trees, explaining their structure, algorithms for searching, inserting and deleting data, and variations like the R*-tree that further optimize performance. It concludes by listing references for additional information on spatial indexing techniques.