2
How do wehear a song or any sounds?
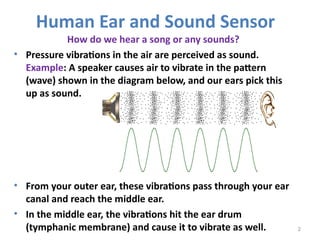
• Pressure vibrations in the air are perceived as sound.
Example: A speaker causes air to vibrate in the pattern
(wave) shown in the diagram below, and our ears pick this
up as sound.
• From your outer ear, these vibrations pass through your ear
canal and reach the middle ear.
• In the middle ear, the vibrations hit the ear drum
(tymphanic membrane) and cause it to vibrate as well.
Human Ear and Sound Sensor
3.
3
The eardrum vibrates three small bones in the ear in turn,
the hammer, anvil and stirrup (ossicles).
Then the stirrup passes these vibrations to a coiled tube in
the inner ear called the cochlea.
The cochlea is filled with fluid and hair-like small nerve
endings called “cilia,” which pass the information to the
auditory nerve.
The auditory nerve carries the signal to the brain.
Watch the “How the Ear Works” video: (2:02 minutes)
http://www.youtube.com/watch?v=-
bKy02f1pD4&feature=youtu.be&src_vid=ahCbGjasm_E&feature=iv&an
notation_id=annotation_1543119125
Human Ear and Sound Sensor
4.
4
stimulus > sensor> coordinator > effector > response
sound > ear > nervous system > muscle > movement
From the sequence of steps above, this is
what happens when you hear a loud noise such as thunder:
The stimulus is sound, the sensor is your ear that senses it and relays it
through the auditory nerve to your brain, which is the coordinator.
The coordinator makes the decision of how to react, and then commands
the leg muscles (the effector) to run for safety.
So, we go from stimulus (sound) to response (using muscles to get to safety).
Do This: Sketch out the stimulus-to-response sequence for a
robot sound sensor. Identify all the components, as in the
example listed above.
(Example answer on slide 18)
Review: From Stimulus to Response
5.
(As stated inan earlier activity,) robot sensors:
– Gather information from the surroundings and send it to the computer
brick
– Robot sensors can only be used if the robot’s program asks for
information from them!
– Similarly, the robot can only act on information from the sensors if its
program tells it to do so!
How do sensors send signals to the LEGO
computer (brick)?
– The sensors send information through wires (similar to the nervous
system in your body) that connect them to the LEGO brick, which uses the
information if its program requires it.
5
Review:
Robot Sensors
6.
6
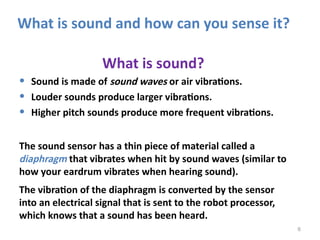
What is sound?
•Sound is made of sound waves or air vibrations.
• Louder sounds produce larger vibrations.
• Higher pitch sounds produce more frequent vibrations.
The sound sensor has a thin piece of material called a
diaphragm that vibrates when hit by sound waves (similar to
how your eardrum vibrates when hearing sound).
The vibration of the diaphragm is converted by the sensor
into an electrical signal that is sent to the robot processor,
which knows that a sound has been heard.
What is sound and how can you sense it?
7.
7
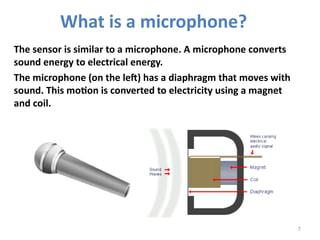
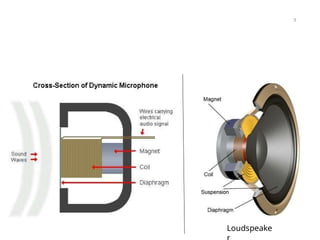
The sensor issimilar to a microphone. A microphone converts
sound energy to electrical energy.
The microphone (on the left) has a diaphragm that moves with
sound. This motion is converted to electricity using a magnet
and coil.
What is a microphone?
8.
Microphone
• Microphone isa type of acoustic transducer or sensor.
• A microphone, is an acoustic-to-electrical transducer
or sensor that converts sound in air into an electrical signal.
•Microphone Frequency Response:
• A microphone ability to hear tones (high and low) across theaudible
spectrum.
• The human ear can hear the range of 20Hz (low bass notes) to
20,000Hz (high notes).
2
9.
• The threemain types of microphones (according to
their principles of operation) are:
1. Dynamic Microphone (Moving Coil Microphone)
2. Condenser Microphone (Capacitor Microphone)
3. Ribbon Microphone
4
10.
Directional Characteristics
A Microphonecan be designed to react to:
• Absolute changes in pressure
• (i.e. pressure transducer)
• The difference between pressure at the front and
rear of the diaphragm
• (i.e. pressure gradient),
• or force & direction of the sound wave
• (i.e. velocity)
This determines its “pickup pattern”
5
11.
Overview of aMicrophone
• Diaphragm—part of microphone which receives
the vibration from sound waves.
• Thickness and material of diaphragm are
changed
depending on the sound waves you wish to pick
up.
How it works
Electrical circuit
is detected
vibrations
use
d
into
to
change an
electrical
thes
e
signal
outpu
t
that “images”
the
soun
d
with
an
voltage or
current.
6
12.
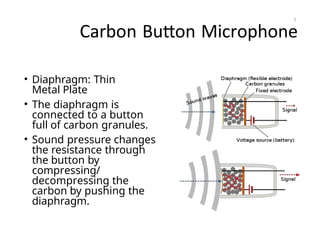
Carbon Button Microphone
•Diaphragm: Thin
Metal Plate
• The diaphragm is
connected to a button
full of carbon granules.
• Sound pressure changes
the resistance through
the button by
compressing/
decompressing the
carbon by pushing the
diaphragm.
7
13.
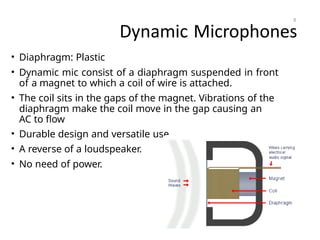
Dynamic Microphones
• Diaphragm:Plastic
• Dynamic mic consist of a diaphragm suspended in front
of a magnet to which a coil of wire is attached.
• The coil sits in the gaps of the magnet. Vibrations of the
diaphragm make the coil move in the gap causing an
AC to flow
• Durable design and versatile use.
• A reverse of a loudspeaker.
• No need of power.
8
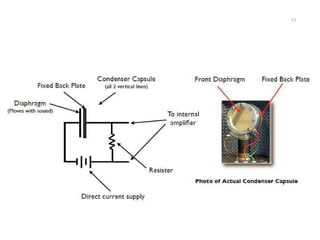
Condenser microphone
• Condenseris the British word for capacitor.
• Diaphragm: Thin metal strip suspended next to a charged
electric plate.
• In a condenser microphone, the diaphragm is one
side of a capacitor which moves in reaction to changes in a
sound field.
• Since the two plates are charged, the motion changes the
voltage between the two plates and these voltage changes
induce electron flow.
• Condenser mic’s require some sort of external power
source (a battery or “phantom power”)
• Because the diaphragm is very light, condenser mic’s can
have a highly detailed response and tend to be much more
sensitive than a dynamic mic
10
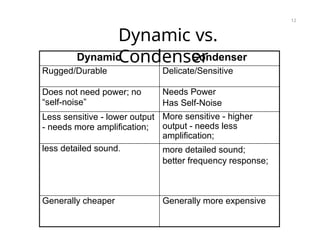
Dynamic vs.
Condenser
12
Dynamic Condenser
Rugged/DurableDelicate/Sensitive
Does not need power; no
“self-noise”
Needs Power
Has Self-Noise
Less sensitive - lower output
- needs more amplification;
More sensitive - higher
output - needs less
amplification;
less detailed sound. more detailed sound;
better frequency response;
Generally cheaper Generally more expensive
18.
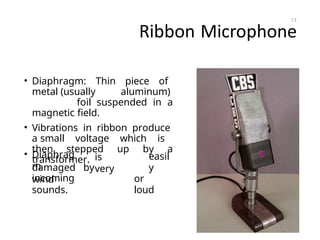
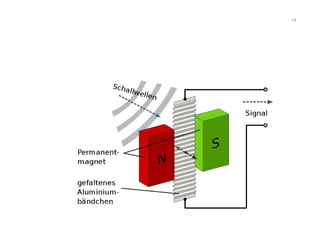
Ribbon Microphone
• Diaphragm:Thin piece of
metal (usually aluminum)
foil suspended in a
magnetic field.
• Vibrations in ribbon produce
a small voltage which is
then stepped up by a
transformer.
• Diaphrag
m
is
very
easil
y
or
loud
damaged by
wind
incoming
sounds.
13
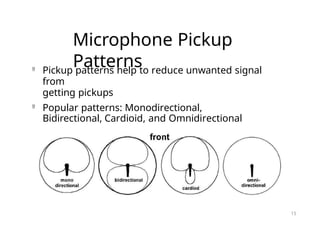
Microphone Pickup
Patterns
Pickup patternshelp to reduce unwanted signal
from
getting pickups
Popular patterns: Monodirectional,
Bidirectional, Cardioid, and Omnidirectional
15
21.
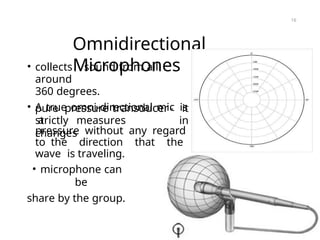
Omnidirectional
Microphones
• collects soundfrom all
around
360 degrees.
• A true omni-directional mic is
a
pure pressure transducer- it
in
strictly measures
changes
pressure without any regard
to the direction that the
wave is traveling.
• microphone can
be
share by the group.
16
22.
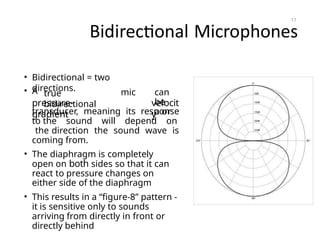
Bidirectional Microphones
• Bidirectional= two
directions.
• A true
bidirectional
mic can
be
a or
pressure-
gradient
velocit
y
transducer, meaning its response
to the sound will depend on
the direction the sound wave is
coming from.
• The diaphragm is completely
open on both sides so that it can
react to pressure changes on
either side of the diaphragm
• This results in a “figure-8” pattern -
it is sensitive only to sounds
arriving from directly in front or
directly behind
17
23.
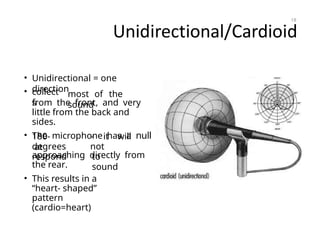
Unidirectional/Cardioid
• Unidirectional =one
direction
• collect
s
most of the
sound
from the front, and very
little from the back and
sides.
• The microphone has a null
at
180-
degrees
respond
- it will
not
to
sound
approaching directly from
the rear.
• This results in a
“heart- shaped”
pattern
(cardio=heart)
18
24.
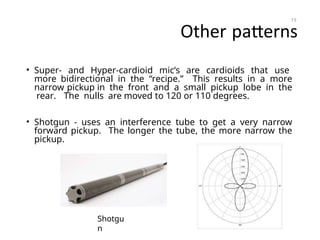
Other patterns
• Super-and Hyper-cardioid mic’s are cardioids that use
more bidirectional in the “recipe.” This results in a more
narrow pickup in the front and a small pickup lobe in the
rear. The nulls are moved to 120 or 110 degrees.
• Shotgun - uses an interference tube to get a very narrow
forward pickup. The longer the tube, the more narrow the
pickup.
19
Shotgu
n
25.
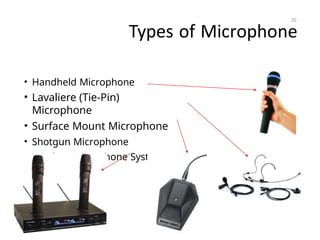
Types of Microphone
•Handheld Microphone
• Lavaliere (Tie-Pin)
Microphone
• Surface Mount Microphone
• Shotgun Microphone
• Wireless Microphone System
20












![Acoustics [Microphones]](https://cdn.slidesharecdn.com/ss_thumbnails/acousticsfinalfinal-190716163521-thumbnail.jpg?width=640&height=640&fit=bounds)























































