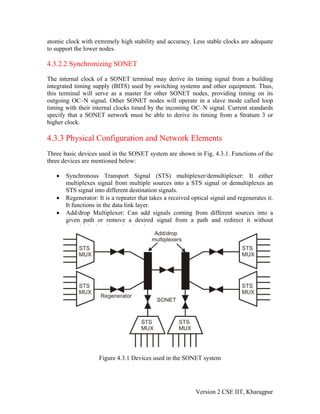
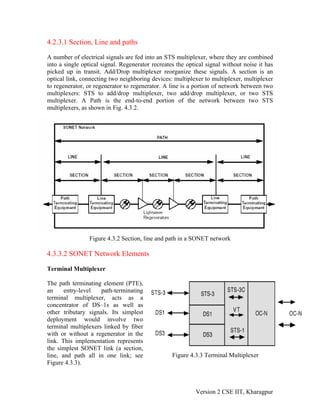
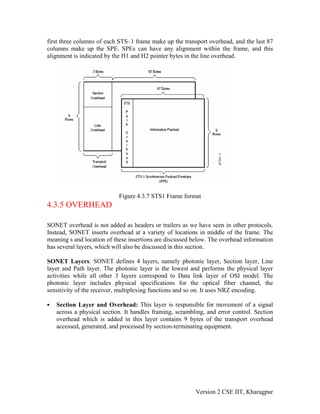
The document discusses Synchronous Optical Network (SONET), a standard developed to efficiently transmit digital signals over optical fiber. It describes the key aspects of SONET including its frame format, multiplexing structure, synchronization, overhead bytes, and network elements such as add/drop multiplexers and regenerators. SONET defines a base transmission rate of 51.84 Mbps (STS-1) and uses byte interleaving and integer multiplexing to efficiently transmit lower rate signals. Overhead bytes are used for functions like framing, error detection, administration and management.