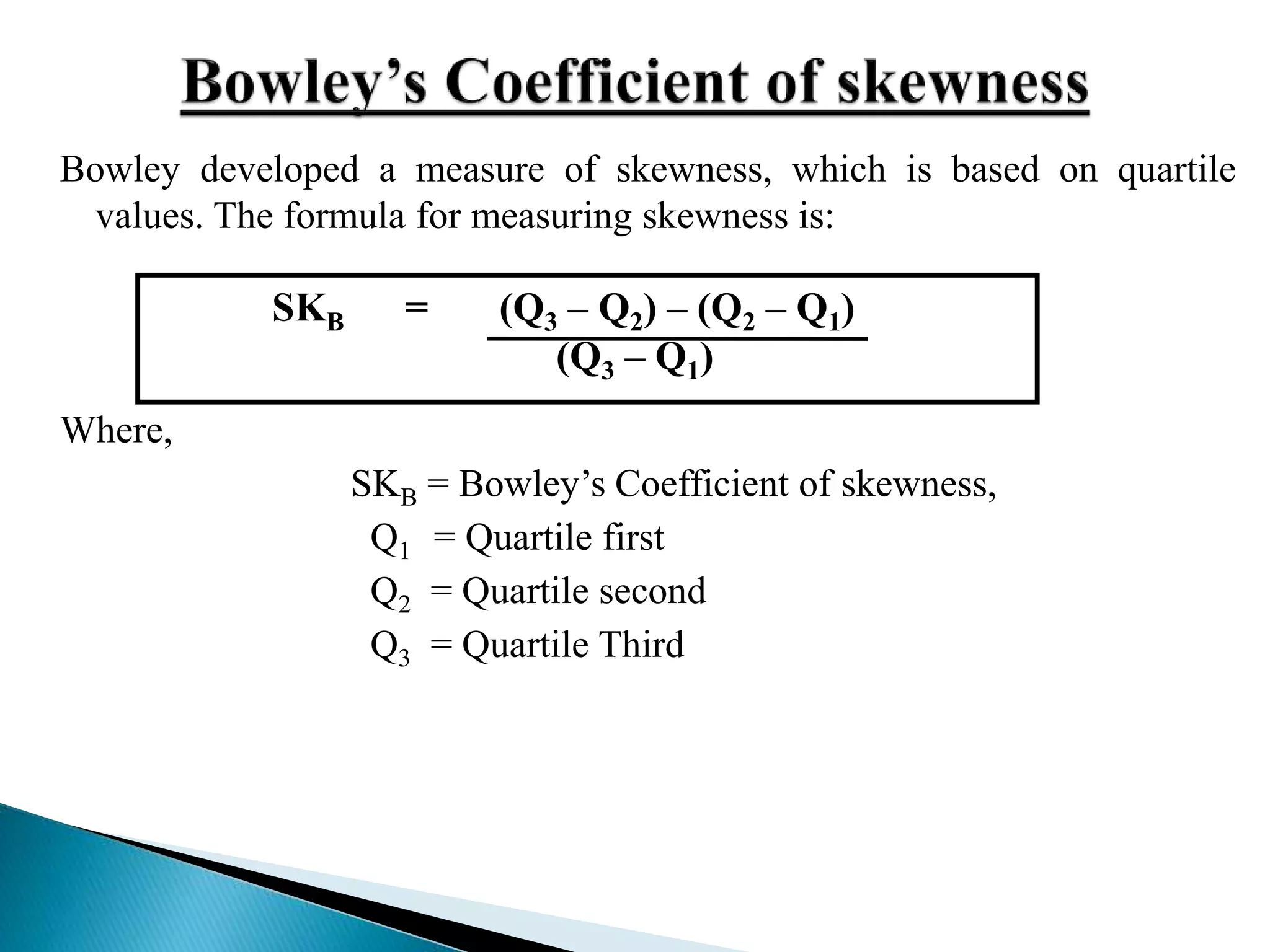
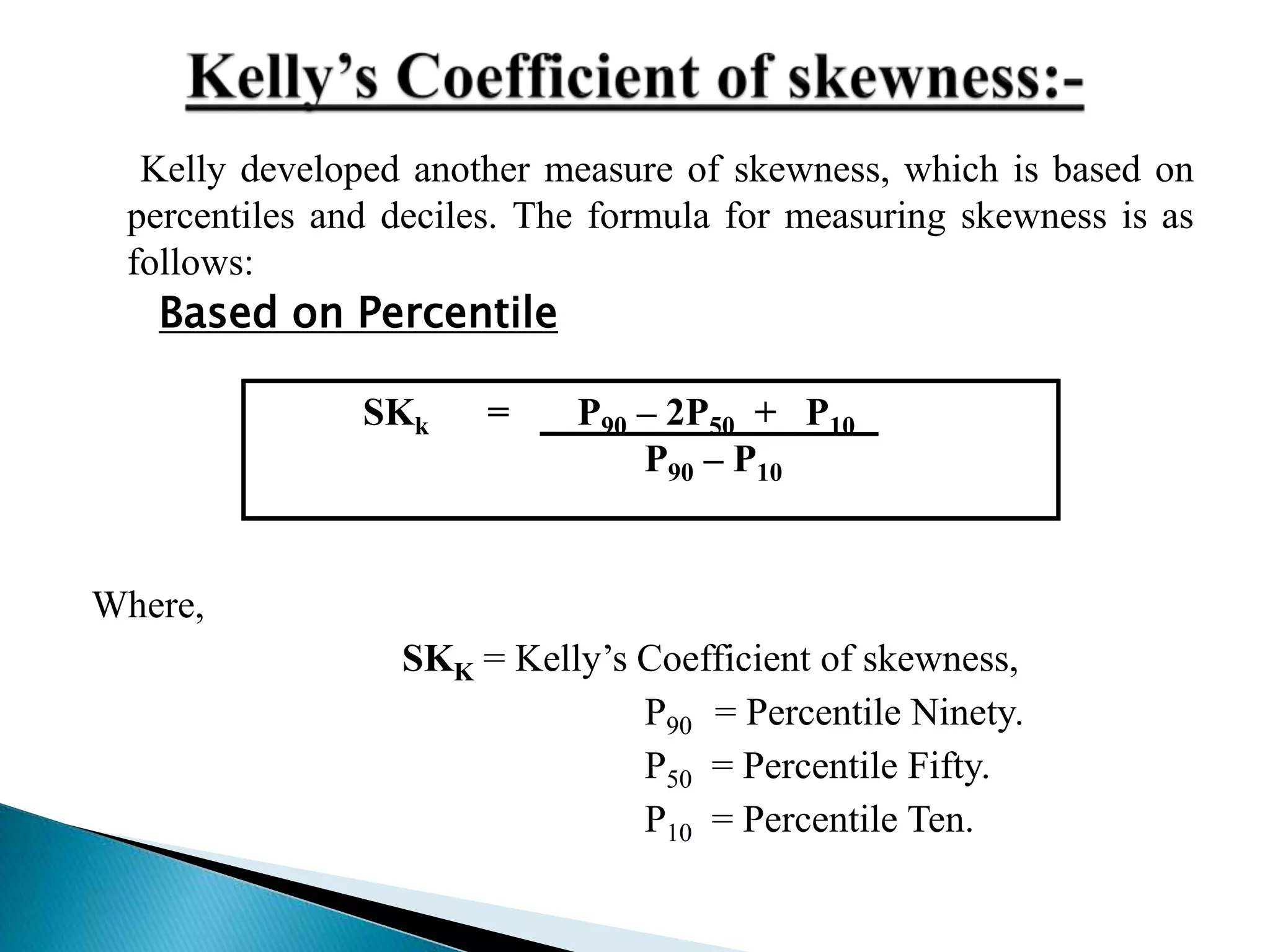
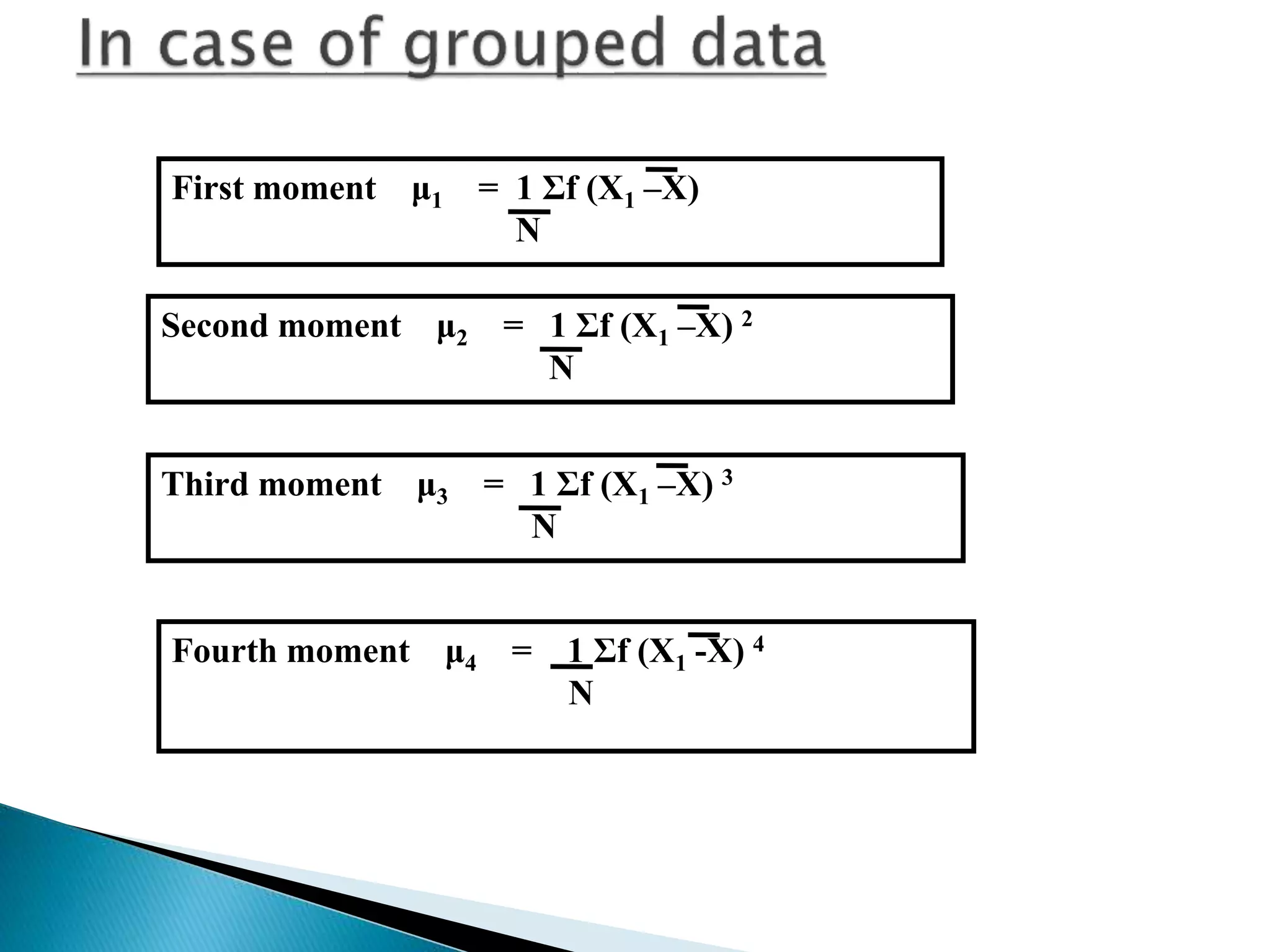
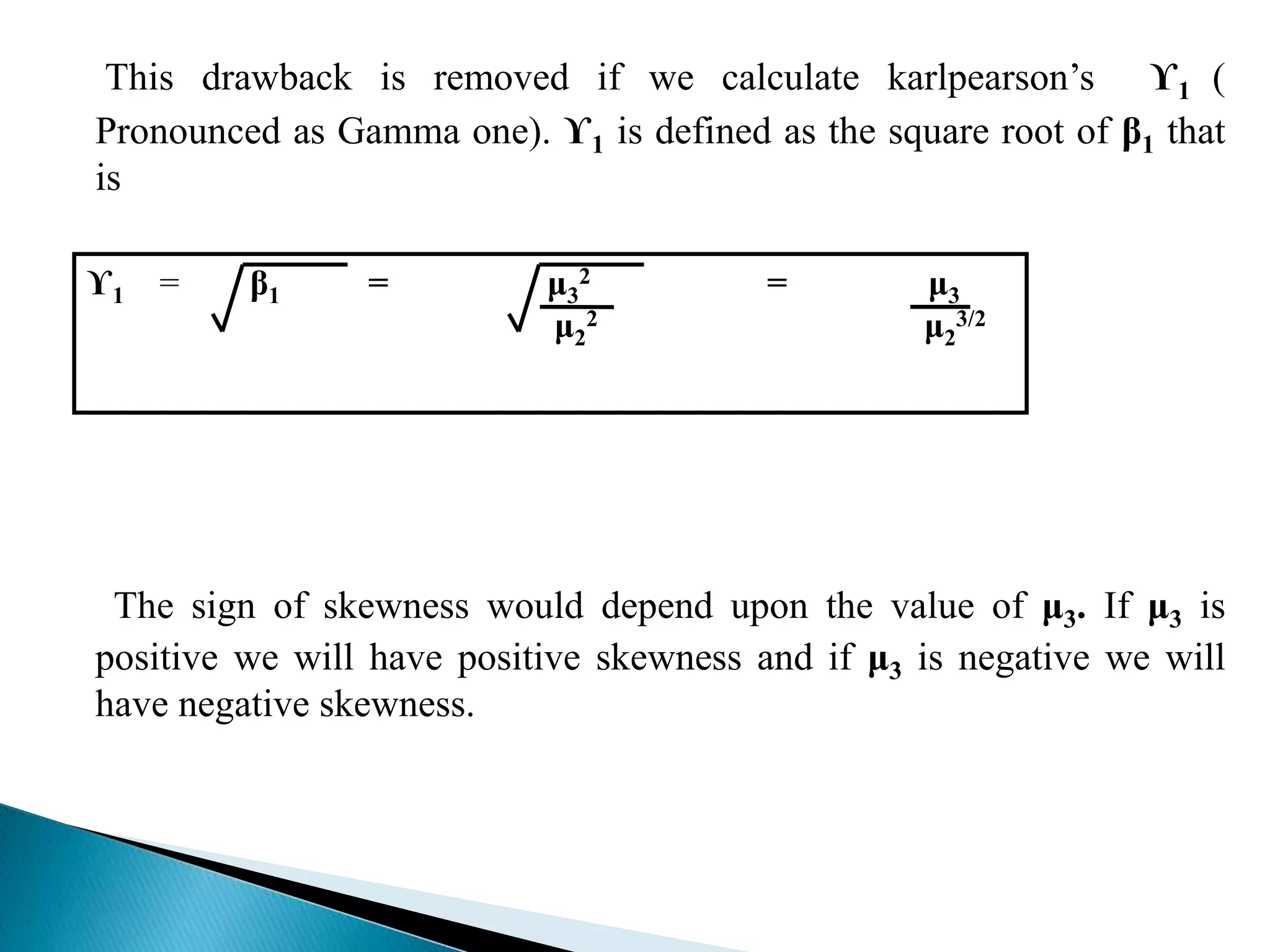
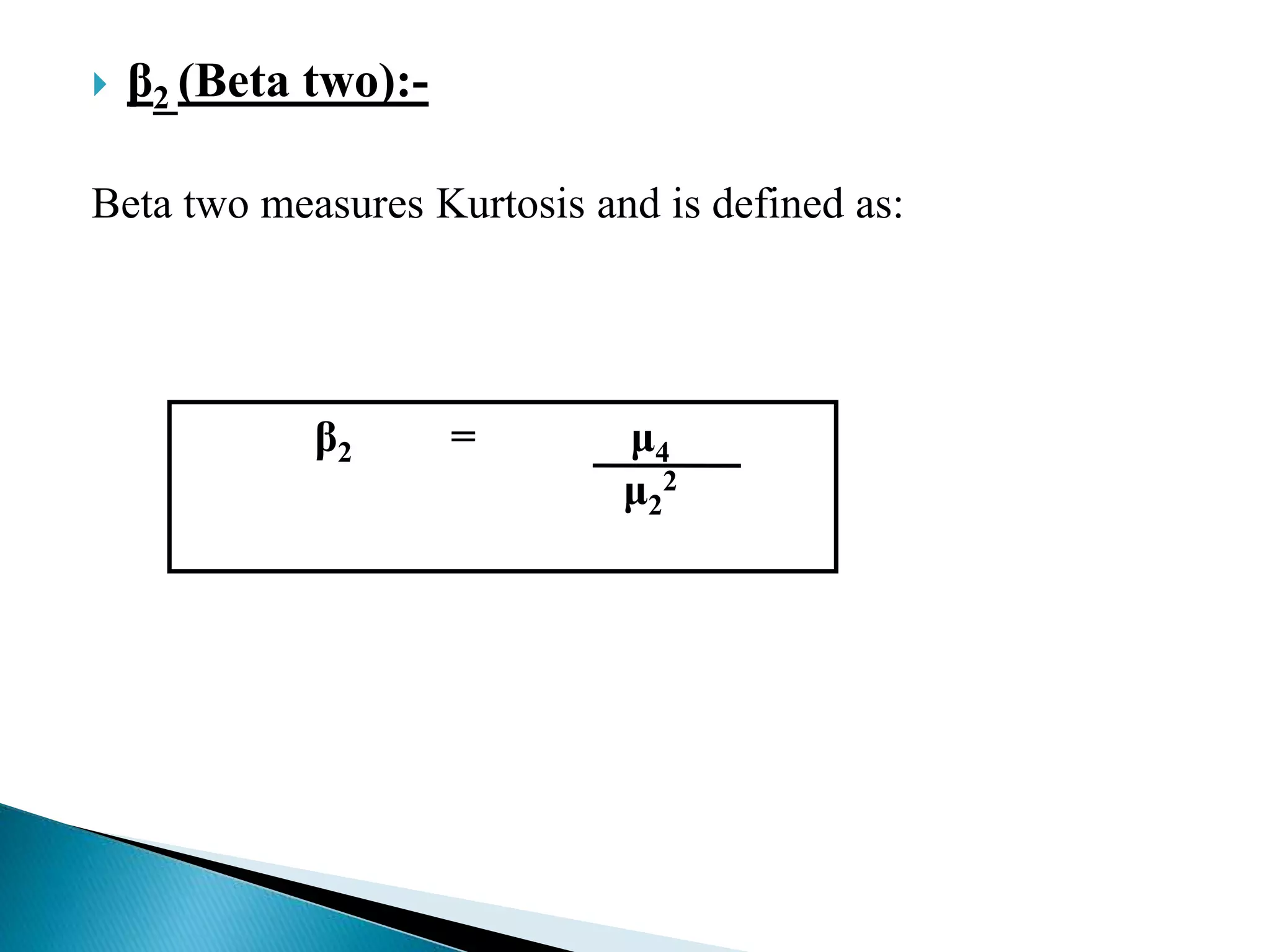
This document discusses measures of skewness and kurtosis in statistics. It defines skewness as asymmetry in a distribution where the mean and median are not equal. Positively skewed distributions have a mean greater than the median, while negatively skewed have a mean less than the median. Kurtosis refers to the peakedness of a distribution, with leptokurtic distributions being more peaked than normal and platykurtic being less peaked. The document outlines formulas for calculating coefficients of skewness using the mean, median, quartiles and percentiles to quantify the degree of skewness. It also defines beta values that can be used to measure kurtosis in a distribution.