Unit 4 discusses the concepts of skewness and kurtosis to analyze frequency distributions beyond central tendency and dispersion measures. It describes various measures for skewness, including Karl Pearson's, Bowley's, and Kelly's coefficients, which help identify the asymmetry of data distributions. Additionally, the unit covers moments and their relation to skewness, enhancing the understanding of data characteristics.



![92
Descriptive
Statistics
Also, μ = × 1000 = 480.
Thus, β =
( )
( )
= 0.01.
Since the sign of 𝜇 is positive and β is small, the distribution is slightly
positively skewed.
If the mean of a distribution is not a convenient figure like 35, as in the above
example, the computation of various central moments may become a
cumbersome task. Alternatively, we can first compute raw moments and then
convert them into central moments by using the equations obtained below.
Conversion of Raw Moments into Central Moments
We can write
μ =
1
𝑁
𝑓 (𝑋 − 𝑋) =
1
𝑁
𝑓 [(𝑋 − 𝐴) − (𝑋 − 𝐴)]
=
1
𝑁
𝑓 [(𝑋 − 𝐴) − μ ] (Sinceμ ==
1
𝑁
𝑓 (𝑋 − 𝐴) = 𝑋 − 𝐴)
Expanding the term within brackets by binomial theorem, we get
=
1
𝑁
𝑓 𝑟∁ (𝑋 − 𝐴) μ − 𝑟∁ (𝑋 − 𝐴) μ + 𝑟∁ (𝑋 − 𝐴) μ − ⋯
=
1
𝑁
𝑓 (𝑋 − 𝐴) − 𝑟∁
1
𝑁
𝑓 (𝑋 − 𝐴) μ + 𝑟∁
+
1
𝑁
𝑓 (𝑋 − 𝐴) μ − ⋯
From the above, we can write
μ = μ − 𝑟∁ μ μ + 𝑟∁ μ μ − 𝑟∁ 𝑟∁ μ μ + ⋯
In particular, taking r = 2, 3, 4, etc., we get
μ = μ − 2∁ μ + 2∁ μ μ = μ − μ (μ = 1)
μ = μ − 3μ μ + 3μ − μ = μ − 3μ μ + 2μ
μ = μ − 4μ μ + 6μ μ − 4μ + μ = μ − 4μ μ + 6μ μ − 3μ
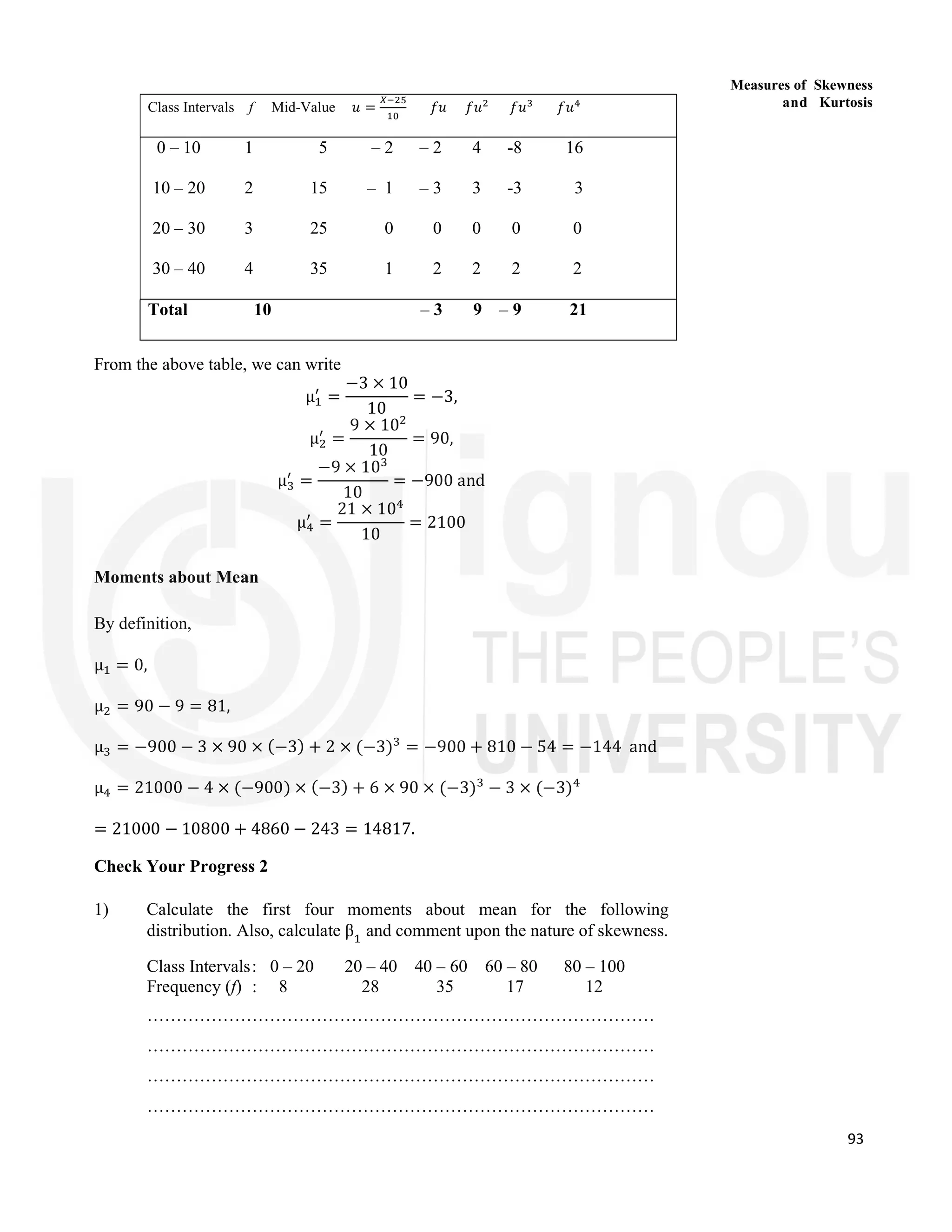
Example 4.3: Compute the first four moments about mean from the
following data.
Class Intervals: 0 – 10 10 – 20 20 – 30 30 – 40
Frequency (f) : 1 3 4 2
Table for computations of raw moments (Take A = 25).](https://image.slidesharecdn.com/unit-4-250121070619-0761cc69/75/i-for-finance-and-banking-application-study-material-pdf-9-2048.jpg)