Download to read offline


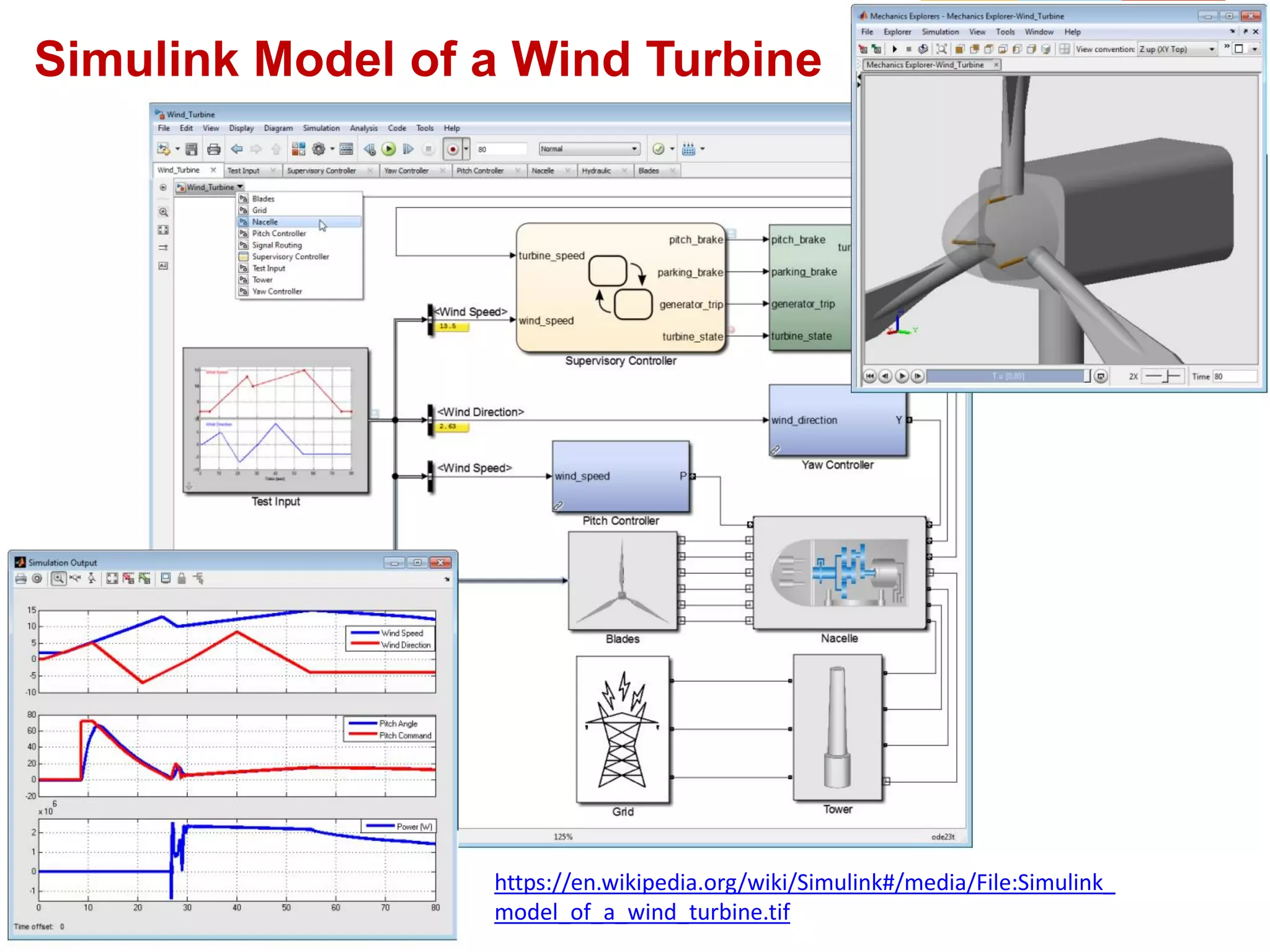
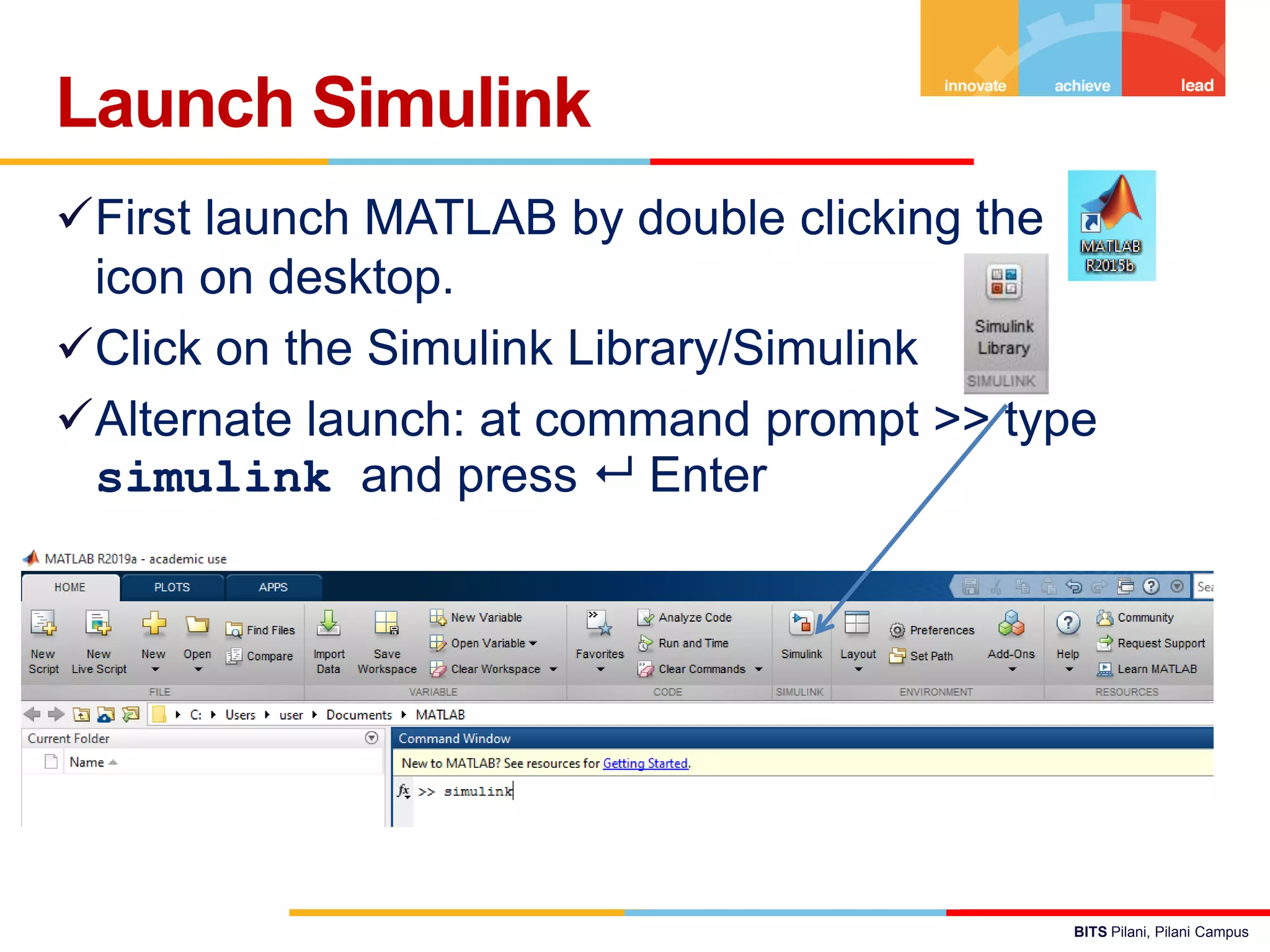
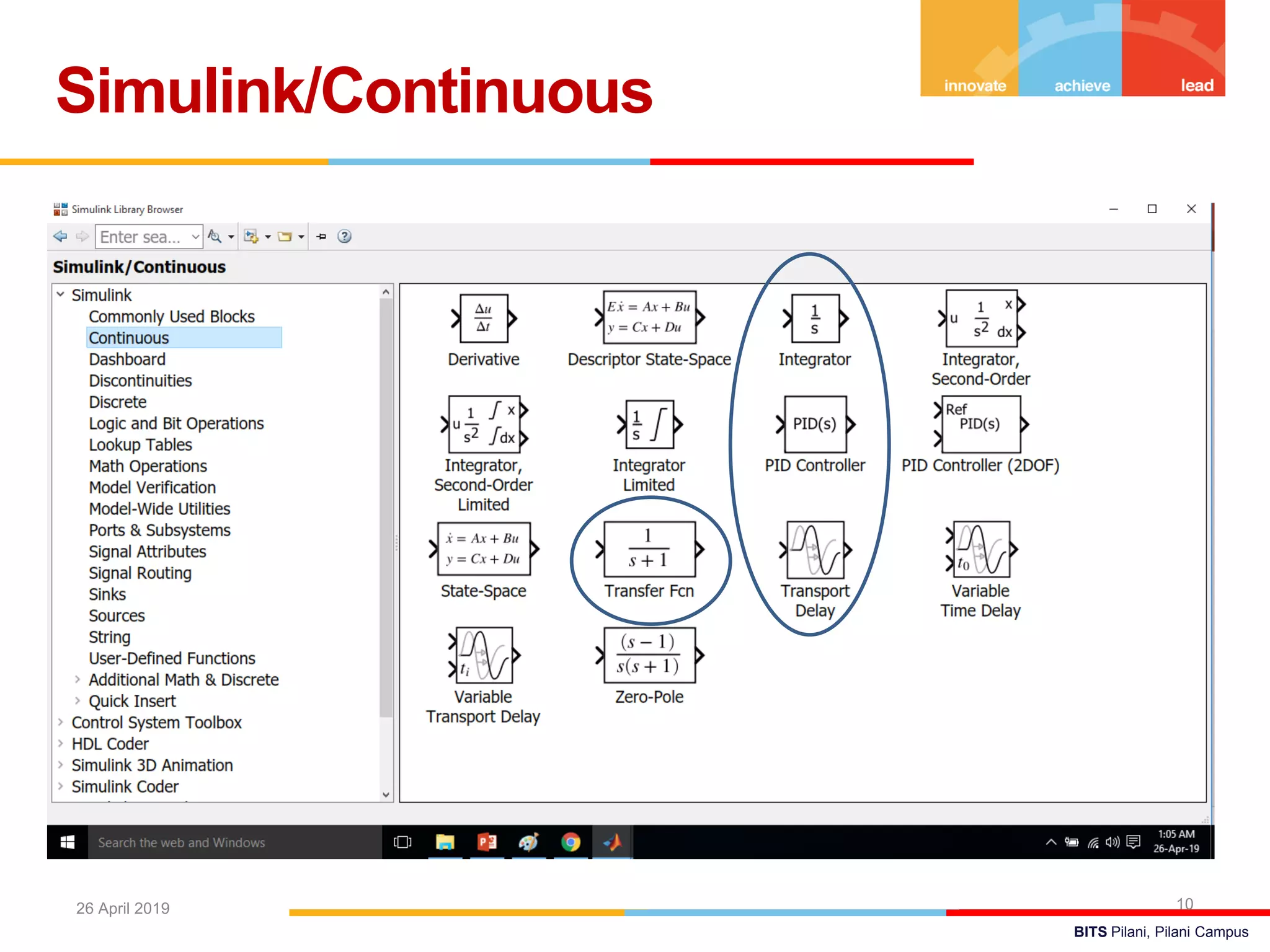




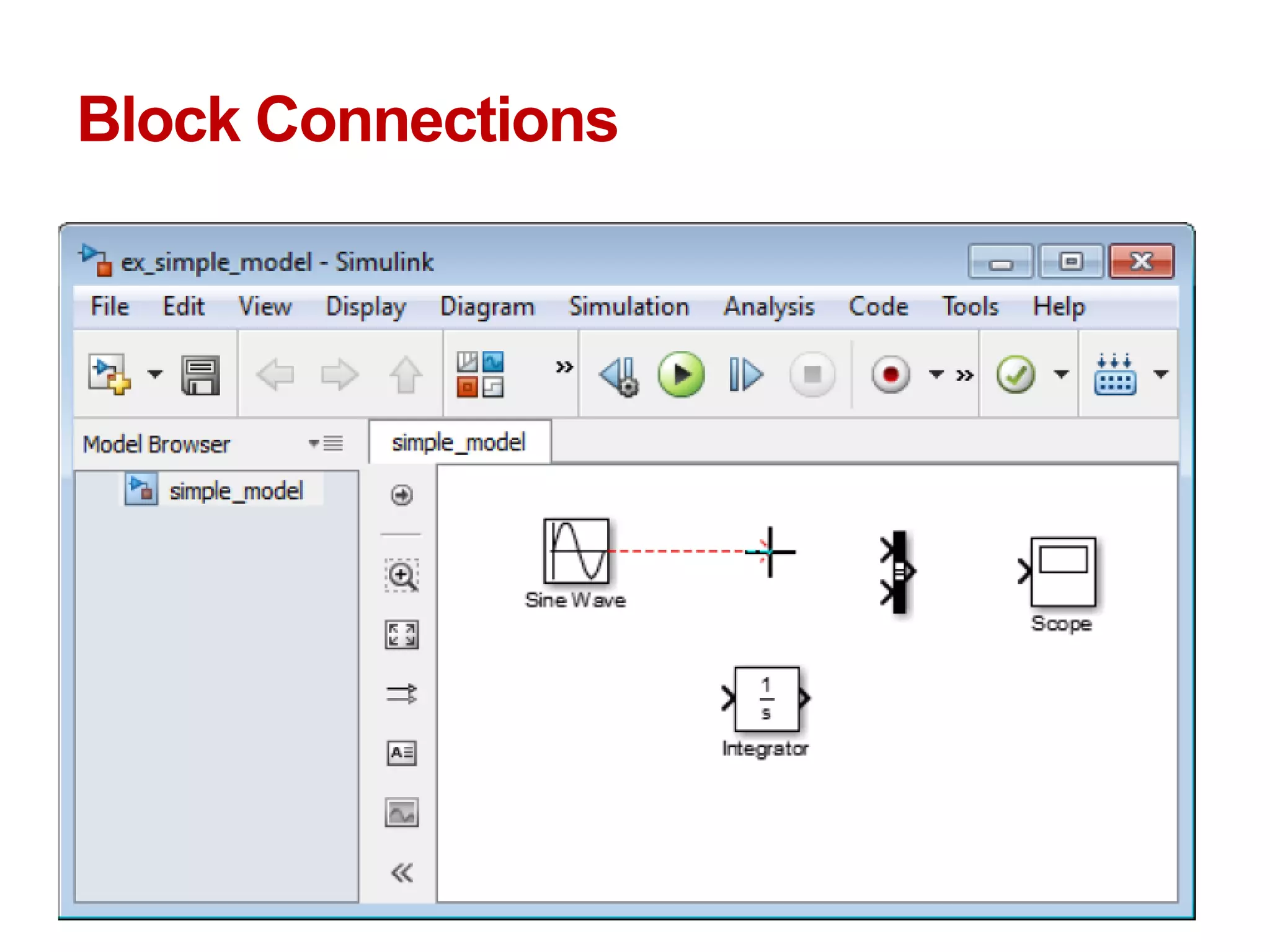
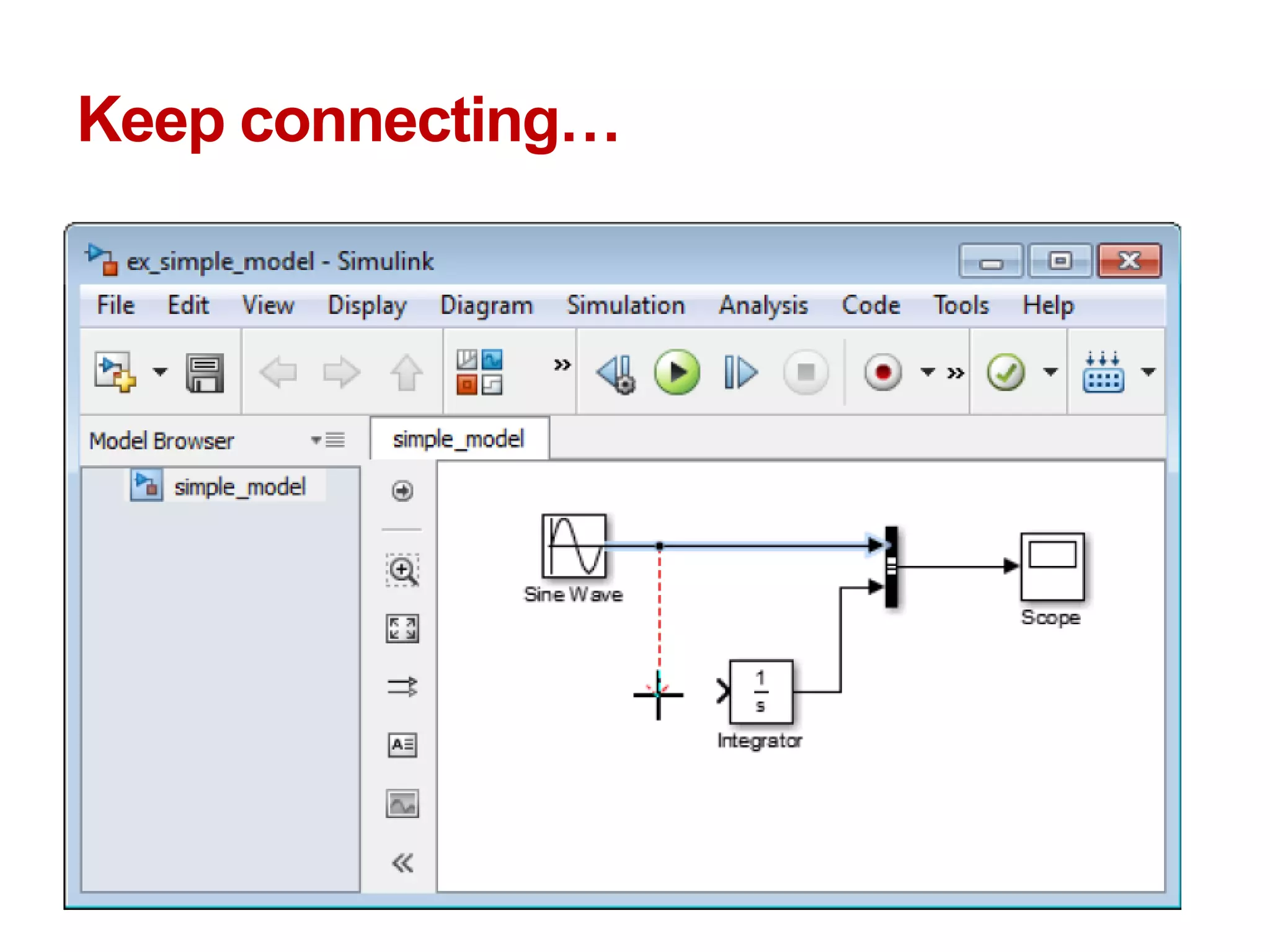
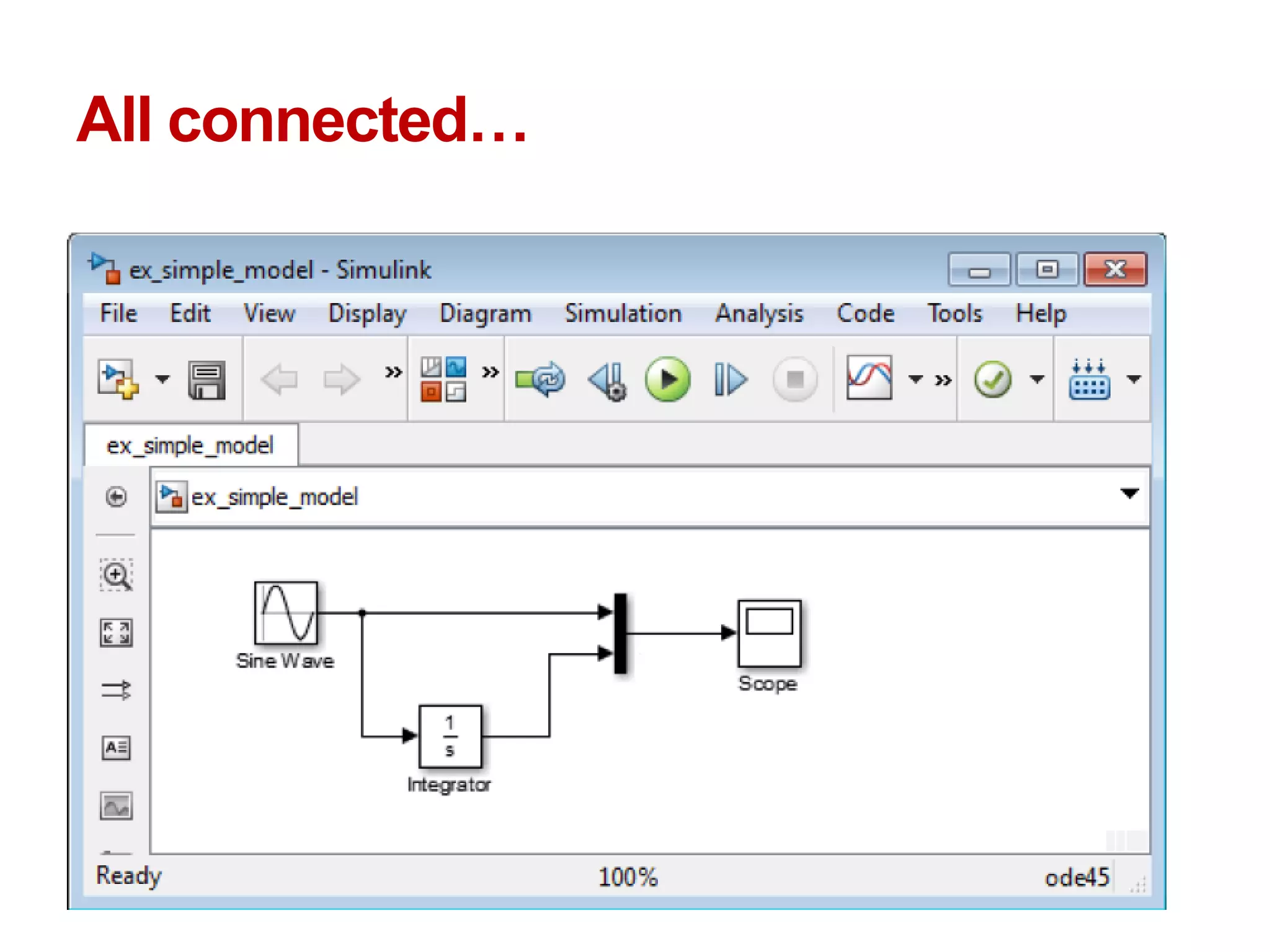

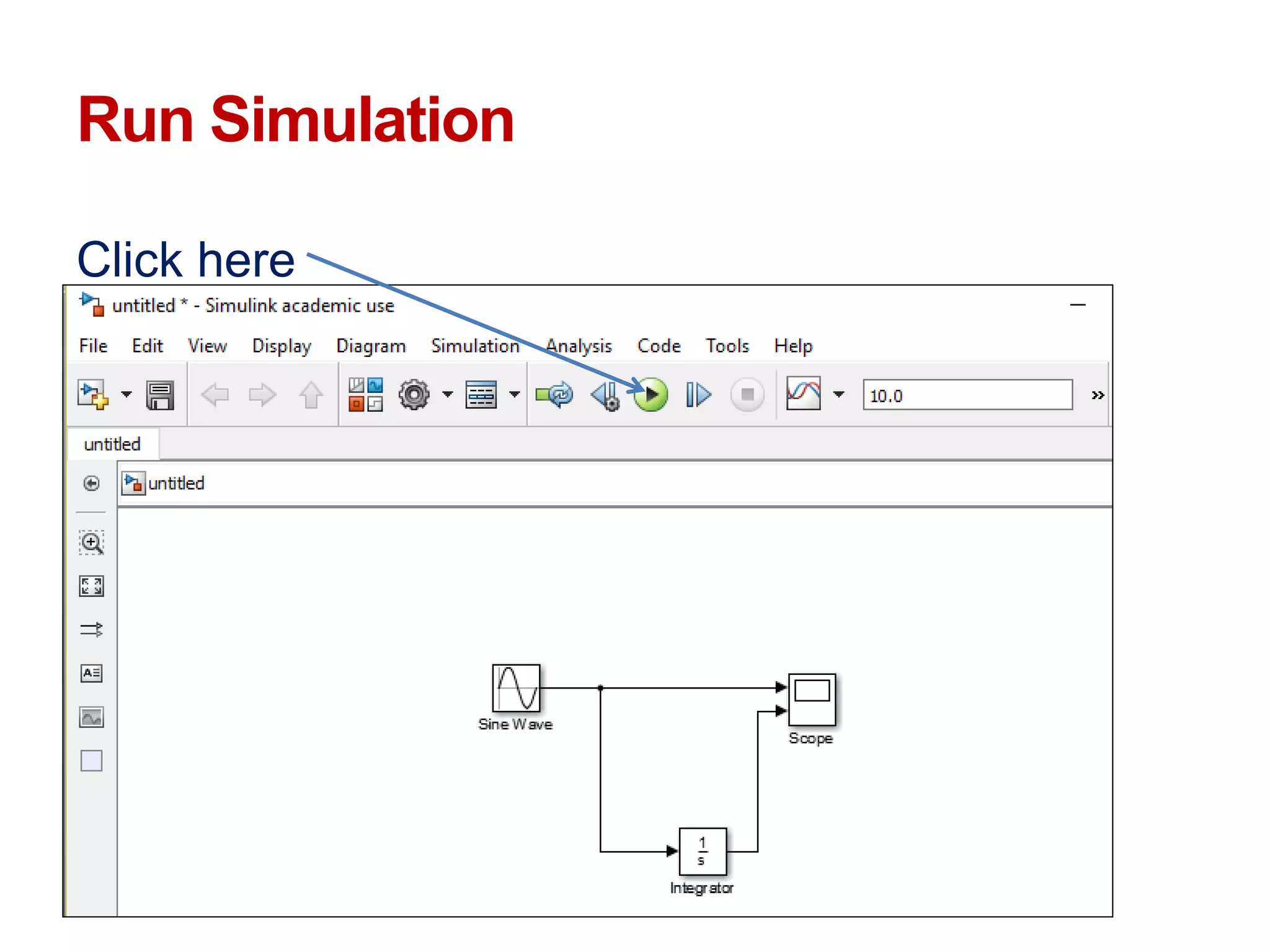

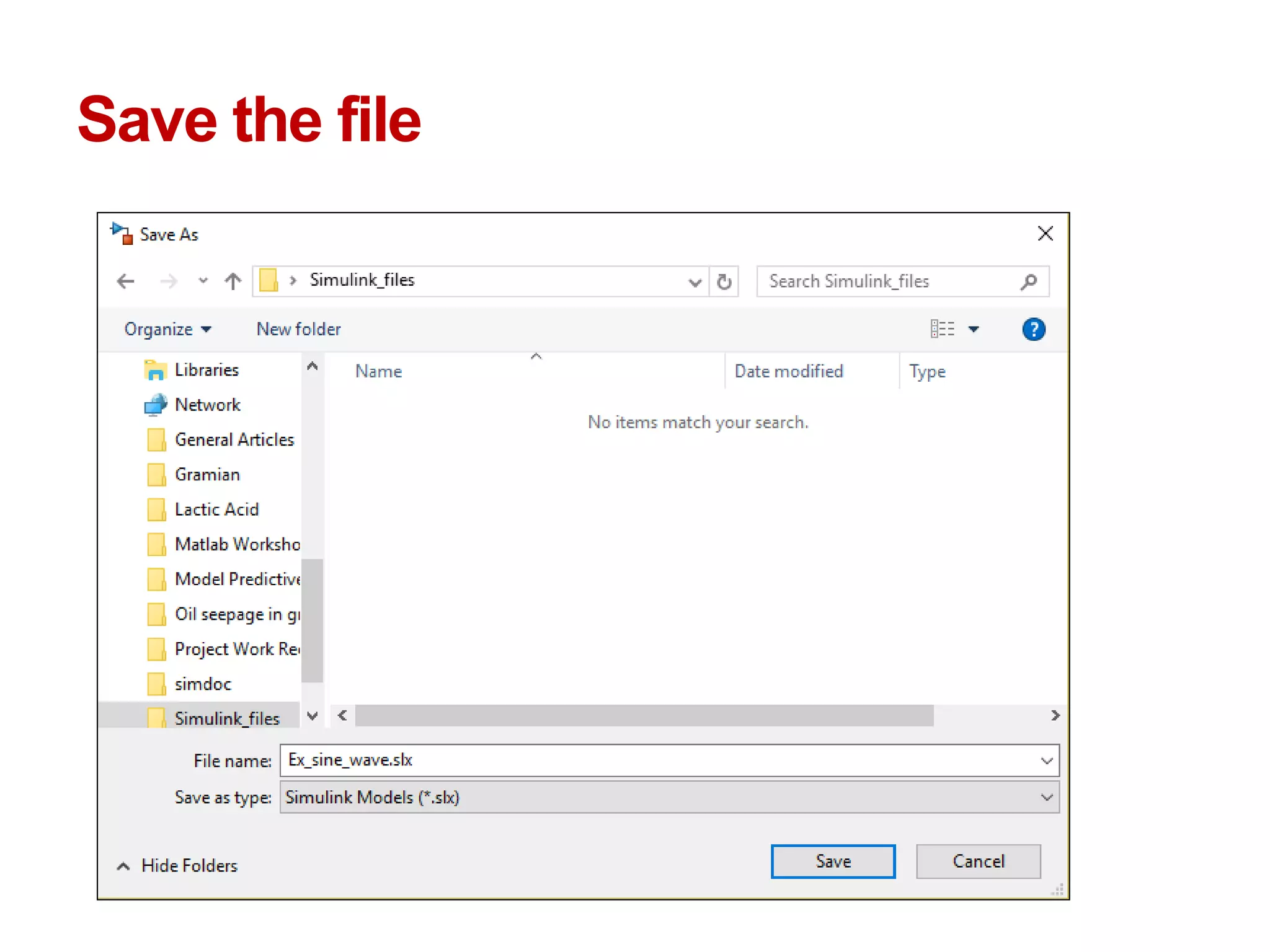













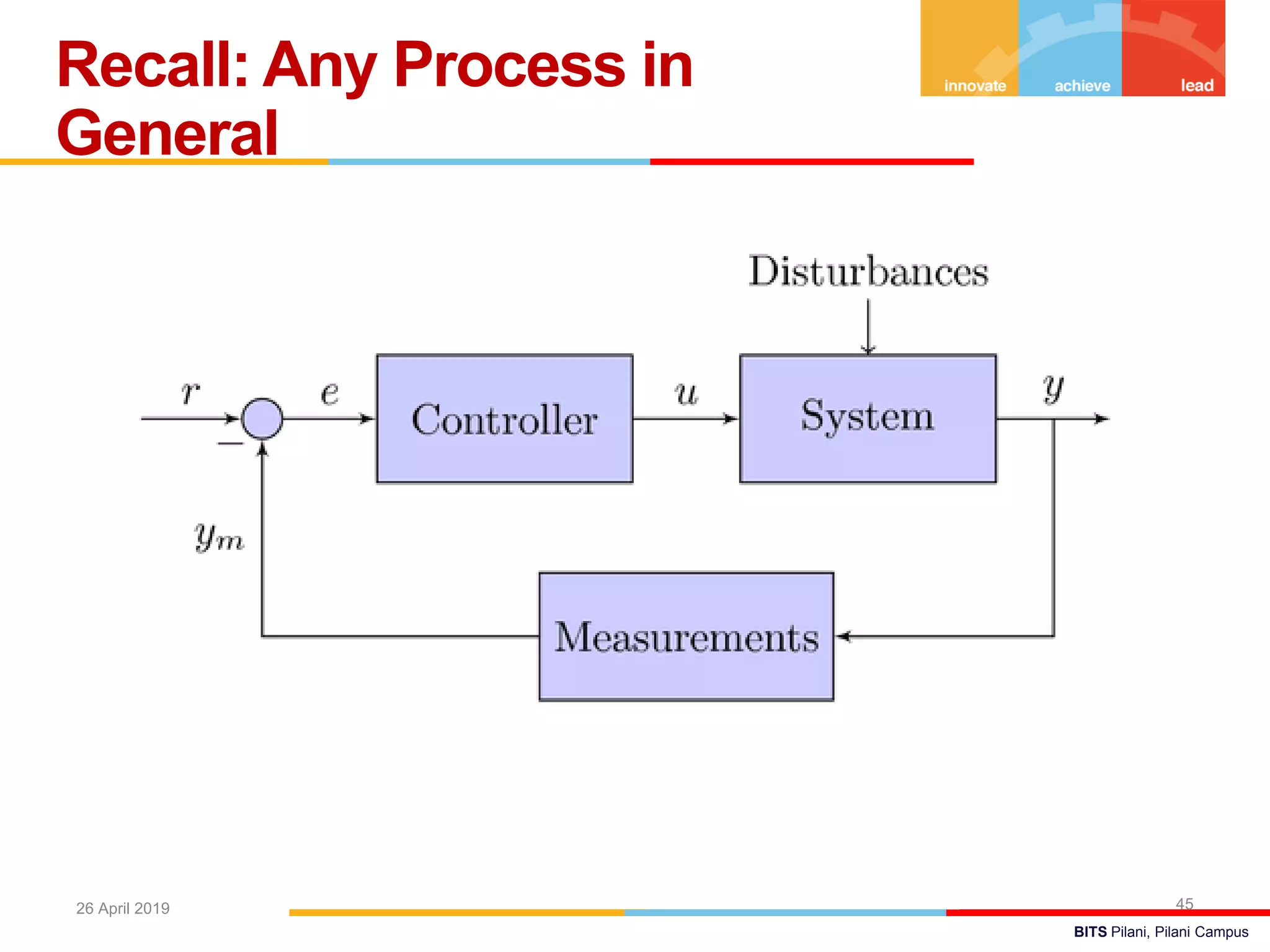

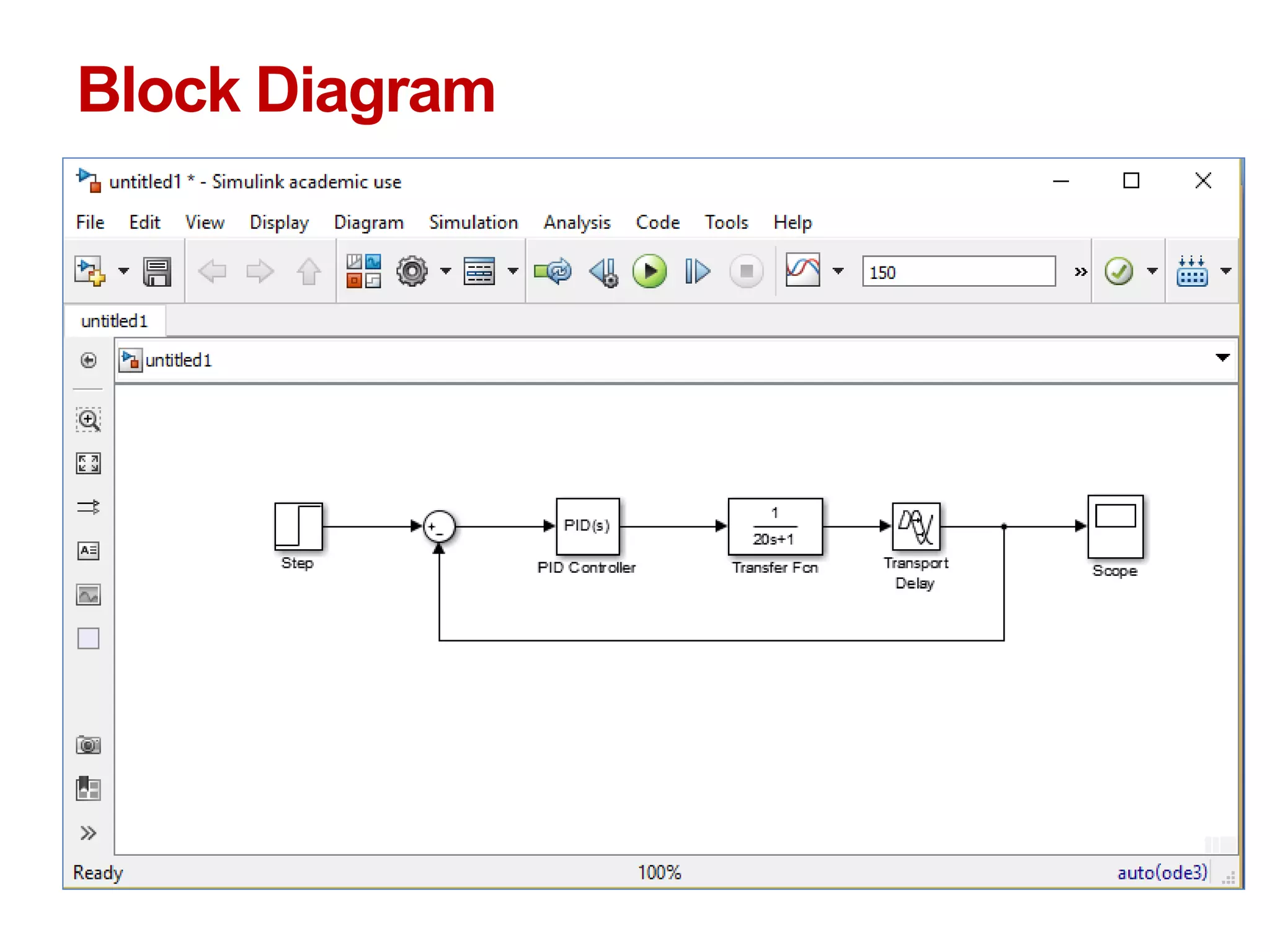





The document describes a presentation on using MATLAB and Simulink for process engineering. It discusses how Simulink can be used to model, simulate, and analyze multi-domain dynamic systems using graphical block diagrams. Examples are provided on building simple models in Simulink, including integrating a sine wave and modeling a first-order process. Process control applications are demonstrated, such as modeling different types of controllers and their effects.
























![[Steven karris] introduction_to_simulink_with_engi](https://cdn.slidesharecdn.com/ss_thumbnails/stevenkarrisintroductiontosimulinkwithengibooksee-160426081331-thumbnail.jpg?width=640&height=640&fit=bounds)