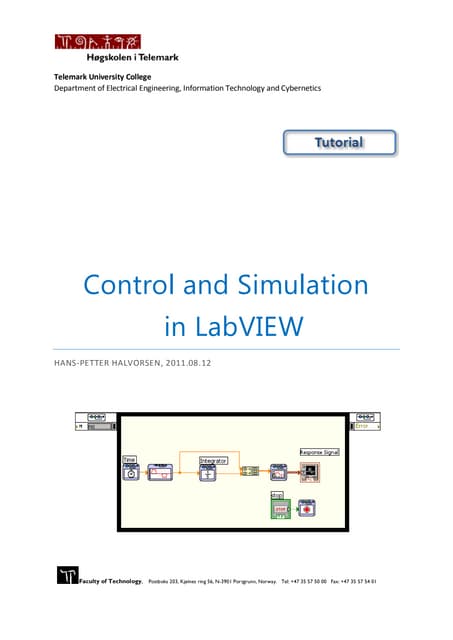
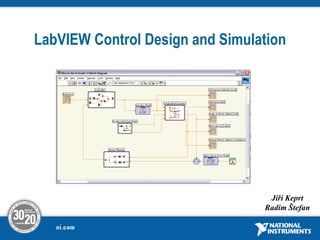
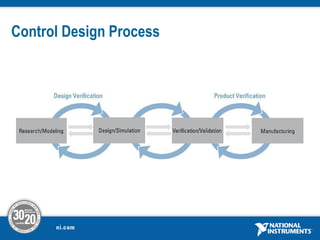
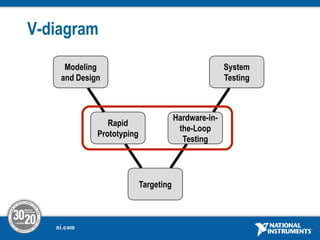
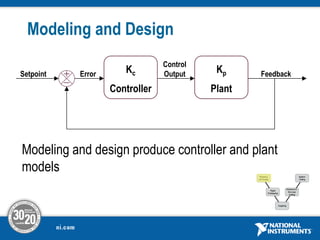
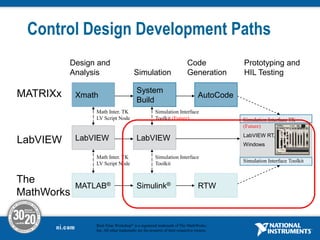
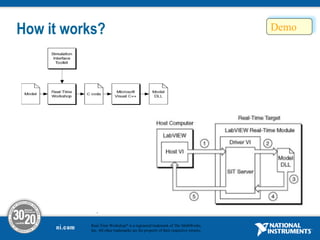
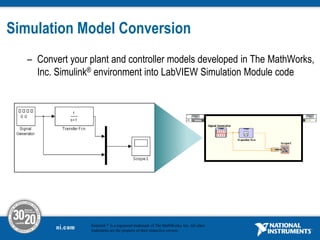
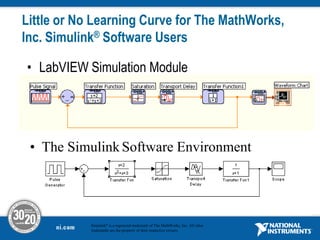
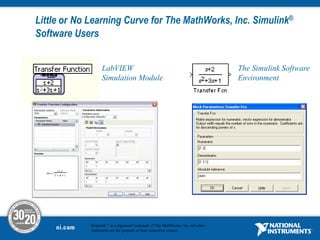
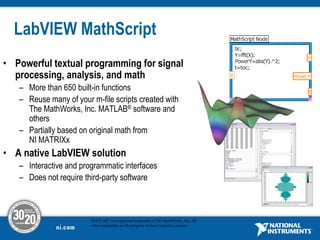
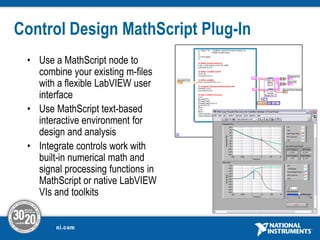
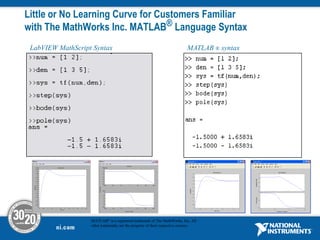
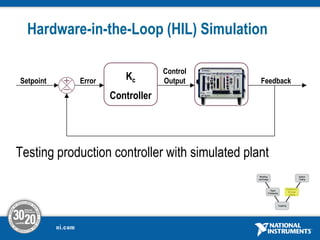
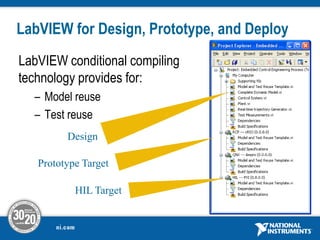
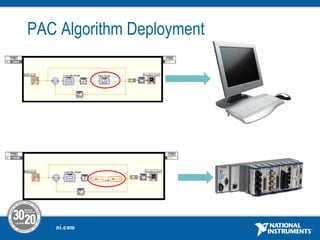
The document discusses LabVIEW control design and simulation, covering processes such as modeling, rapid prototyping, and hardware-in-the-loop testing. It highlights the benefits of using LabVIEW for design, testing, and real-time implementation, providing complete simulation capabilities. Additionally, it describes the integration of MATLAB and Simulink with LabVIEW for enhanced control design and analysis.

![Demo Bouncing Ball
.
mg
x
m
g
x
• Initial condition
s
m
x /
15
]
0
[
• Differential equation of the model
m
x 10
]
0
[ ](https://image.slidesharecdn.com/labviewcontroldesignandsimulationkeprtjiri-240301023852-773a58e7/85/LabVIEWControlDesignandSimulationKeprt_Jiri-pdf-7-320.jpg)















![[Steven karris] introduction_to_simulink_with_engi](https://cdn.slidesharecdn.com/ss_thumbnails/stevenkarrisintroductiontosimulinkwithengibooksee-160426081331-thumbnail.jpg?width=640&height=640&fit=bounds)