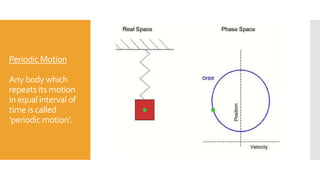
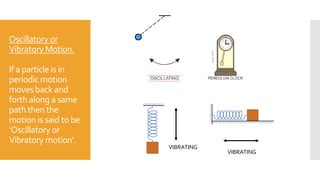
The document discusses wave motion and simple harmonic motion (SHM), defining periodic motion as any motion that repeats itself at equal intervals. SHM is characterized by an acceleration that is directly proportional to displacement, with key examples including pendulums and vibrating masses. The document also outlines the necessary conditions for SHM, including the need for elasticity, a restoring force, and conservation of energy.