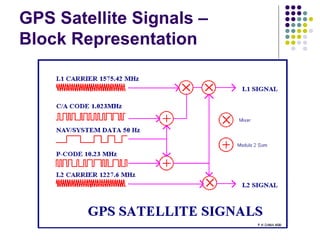
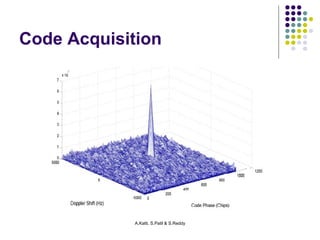
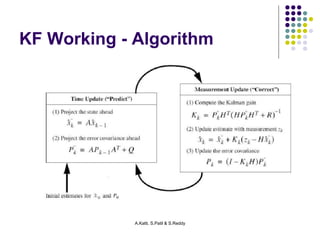
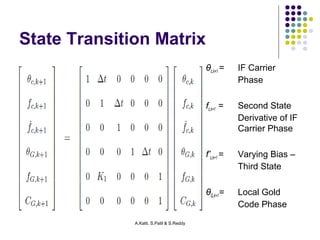
This document presents a simulation study and analysis of an improved navigation solution for GPS. It discusses the key parameters used in GPS like ephemeris, clock, and almanac data. It then describes the GPS signal structure and data frames. It proposes using a software-defined receiver approach and implementing tracking loops and position determination using a Kalman filter. It shows how the Kalman filter can optimally track carrier phase and code measurements to estimate position and overcome limitations of traditional tracking loops. Simulation results demonstrate the Kalman filter's ability to accurately estimate position and velocity. The document concludes that the Kalman filter is well-suited for GPS navigation due to its recursive nature and ability to optimally process noisy measurements.
















































![GPS[Global Positioning System]](https://cdn.slidesharecdn.com/ss_thumbnails/globalpositioningsystem-130707095218-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)






















