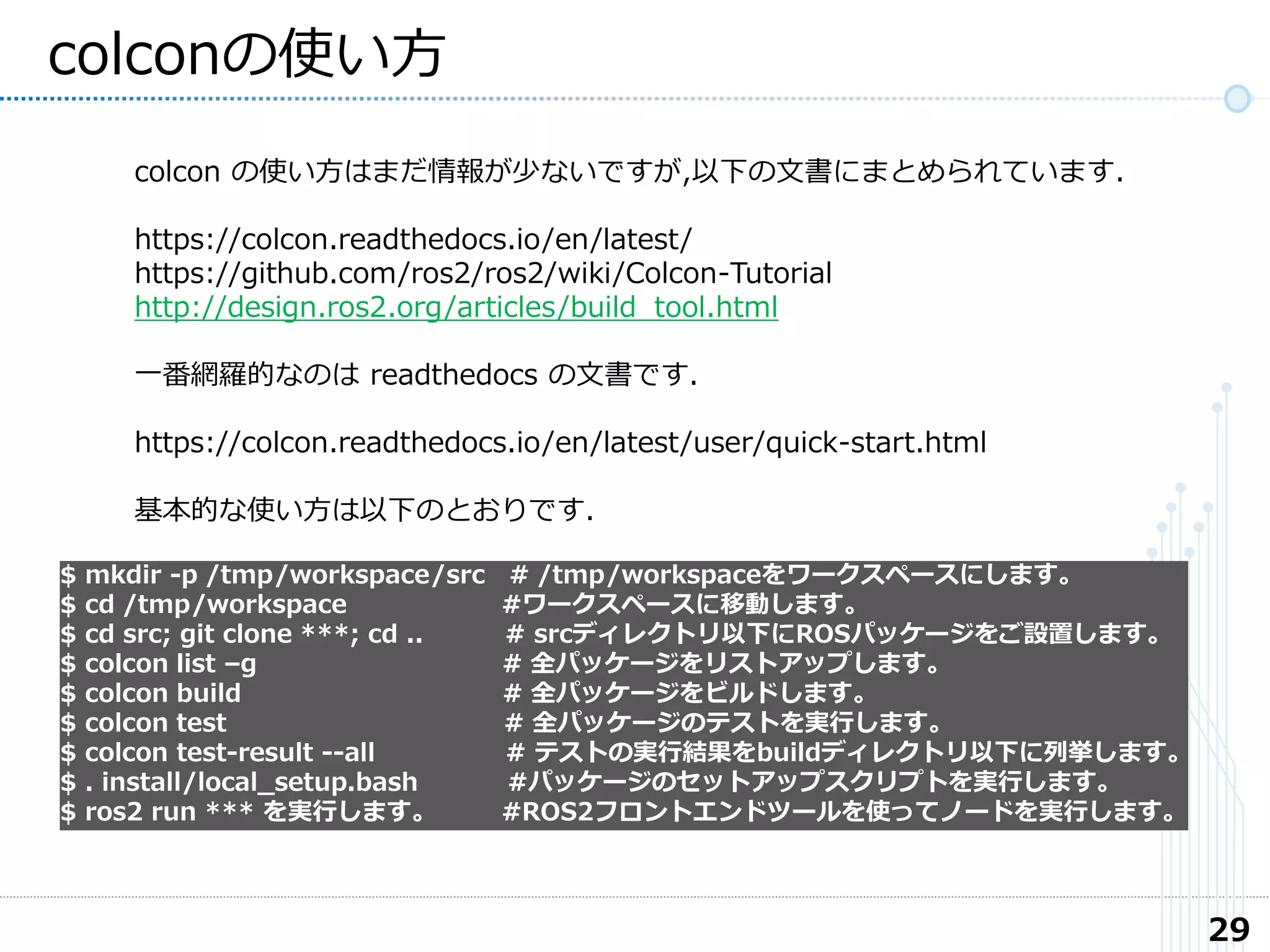
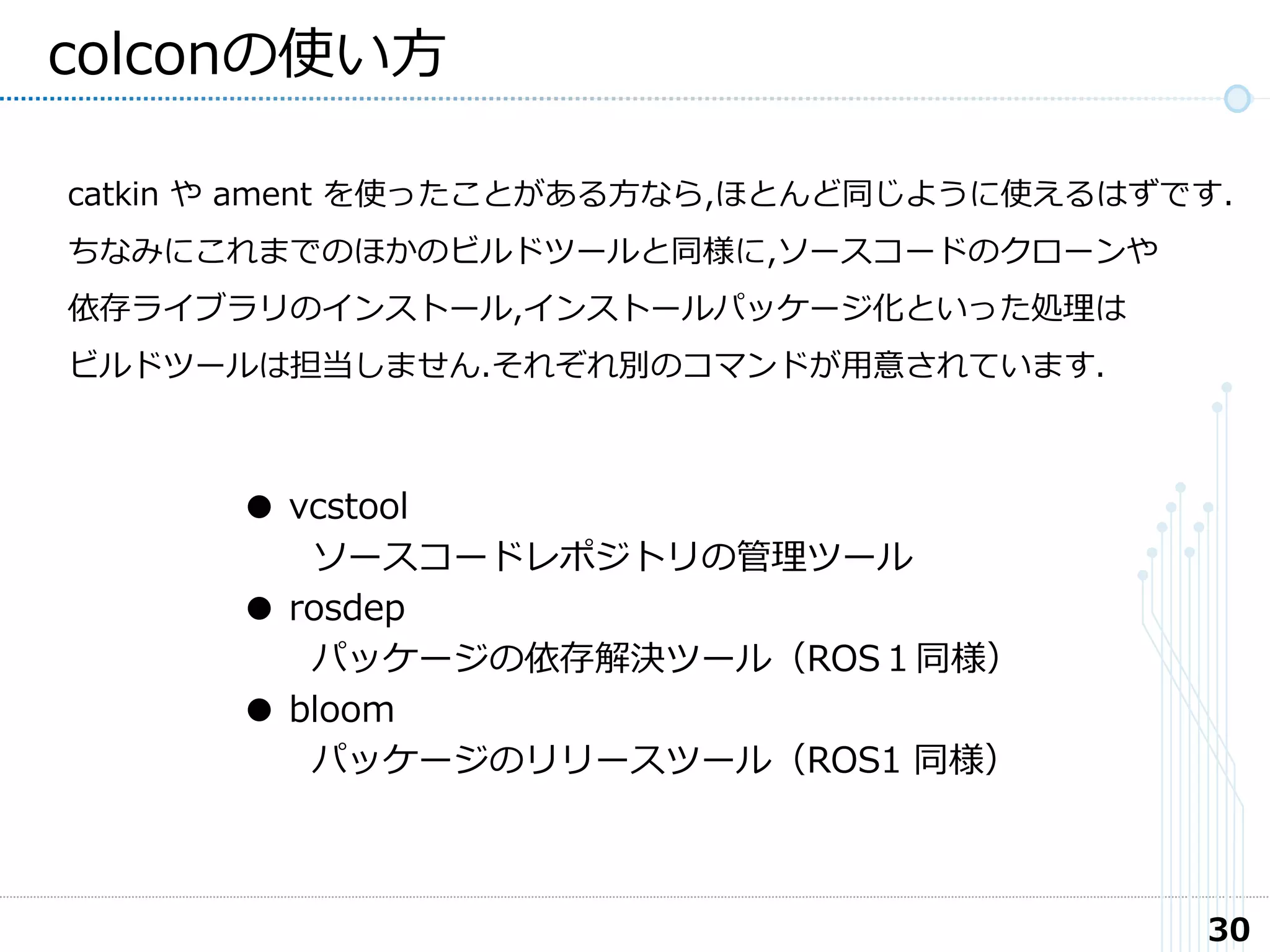
ROS2勉強合宿 @別府温泉での輪講資料 2人目 「第3.1節-第3.5節 ROS2の基本機能(1/2)」 - ROS1とROS2の違い - ROS1とおアーキテクチャの違い - Data Distribution Service - ROS2のフロントエンドツール - ROS1/2パッケージ ビルドツール "colcon"