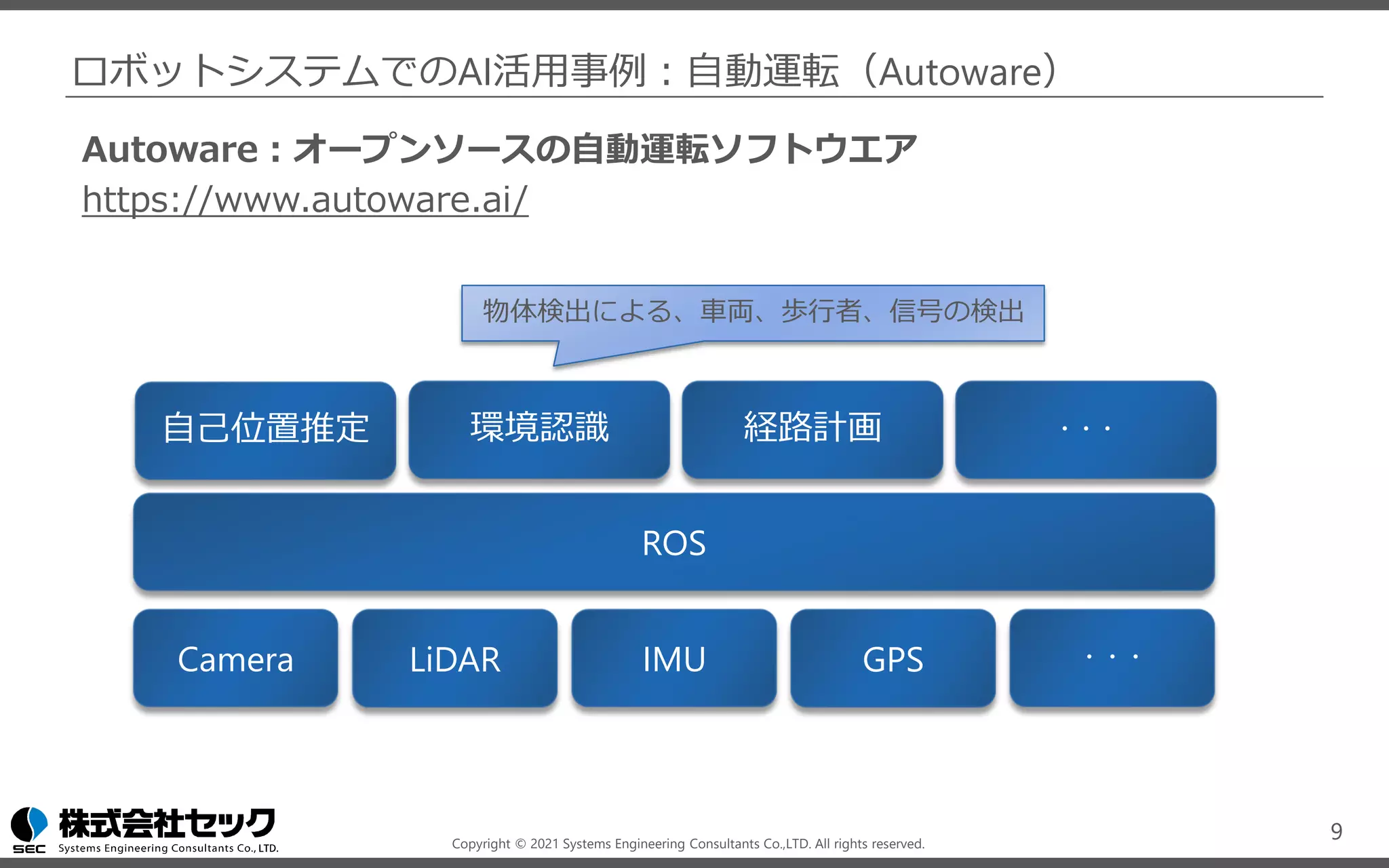
前編では,ロボットシステムにおけるAI活用事例の解説として,ロボットマニピュレーションのための画像認識技術への応用やロボットアーム制御,近年,急速に進歩を遂げている自動車の自動運転技術への応用について簡単に紹介します.後半では,AIを活用したロボットシステムのチュートリアルとして,カメラ画像による物体追跡システムの構築を実際に行ってみます.












![Copyright © 2021 Systems Engineering Consultants Co.,LTD. All rights reserved.
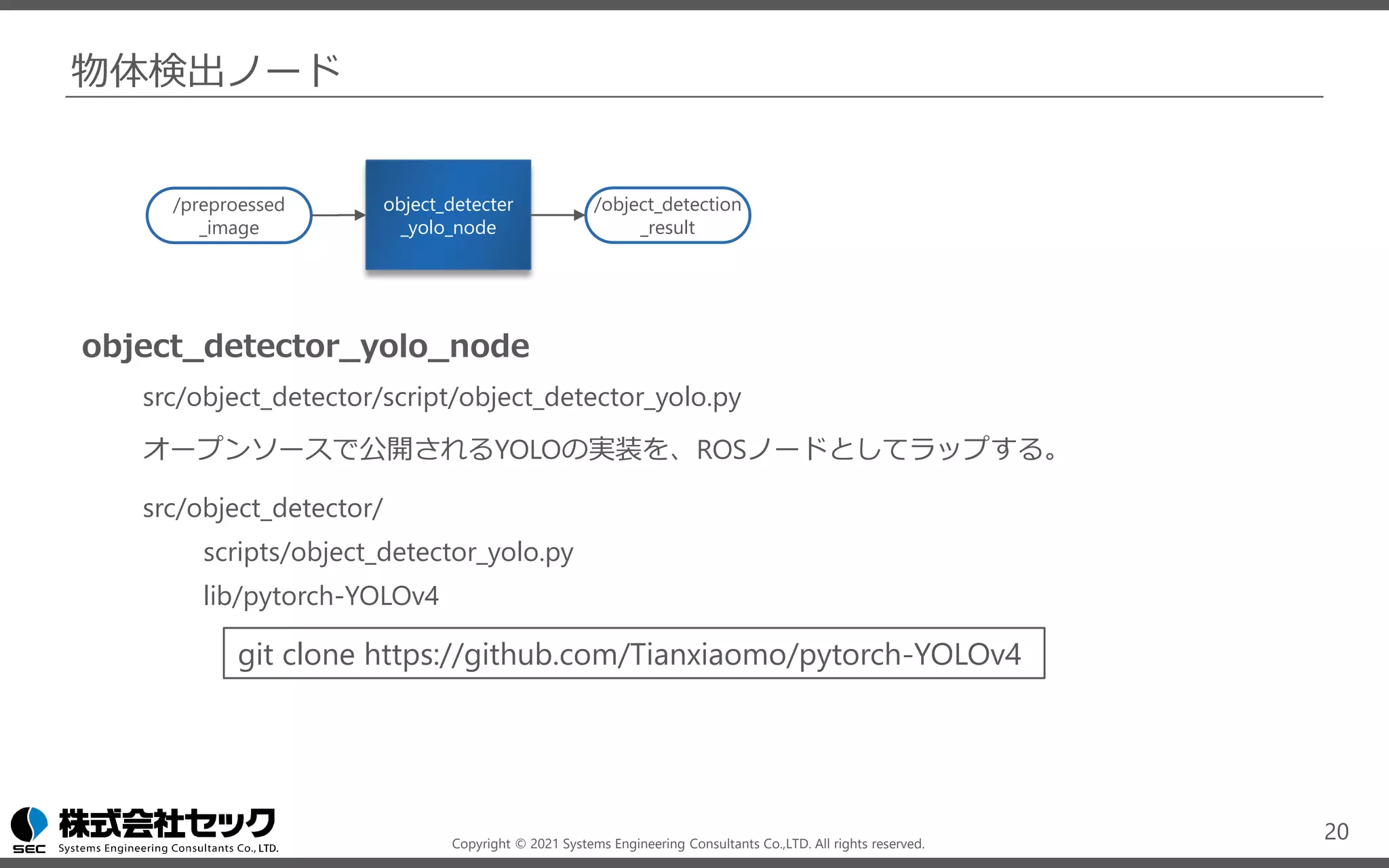
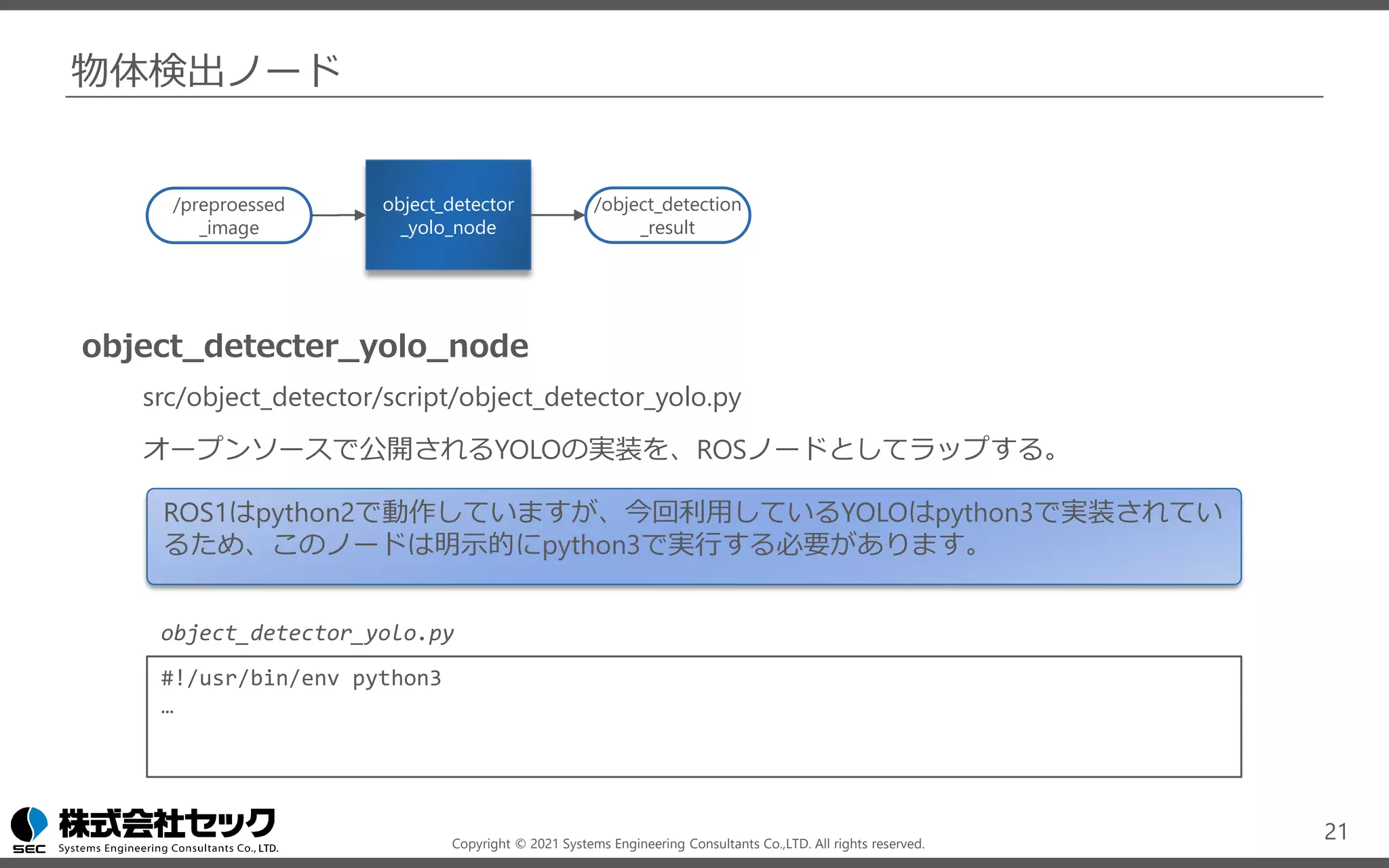
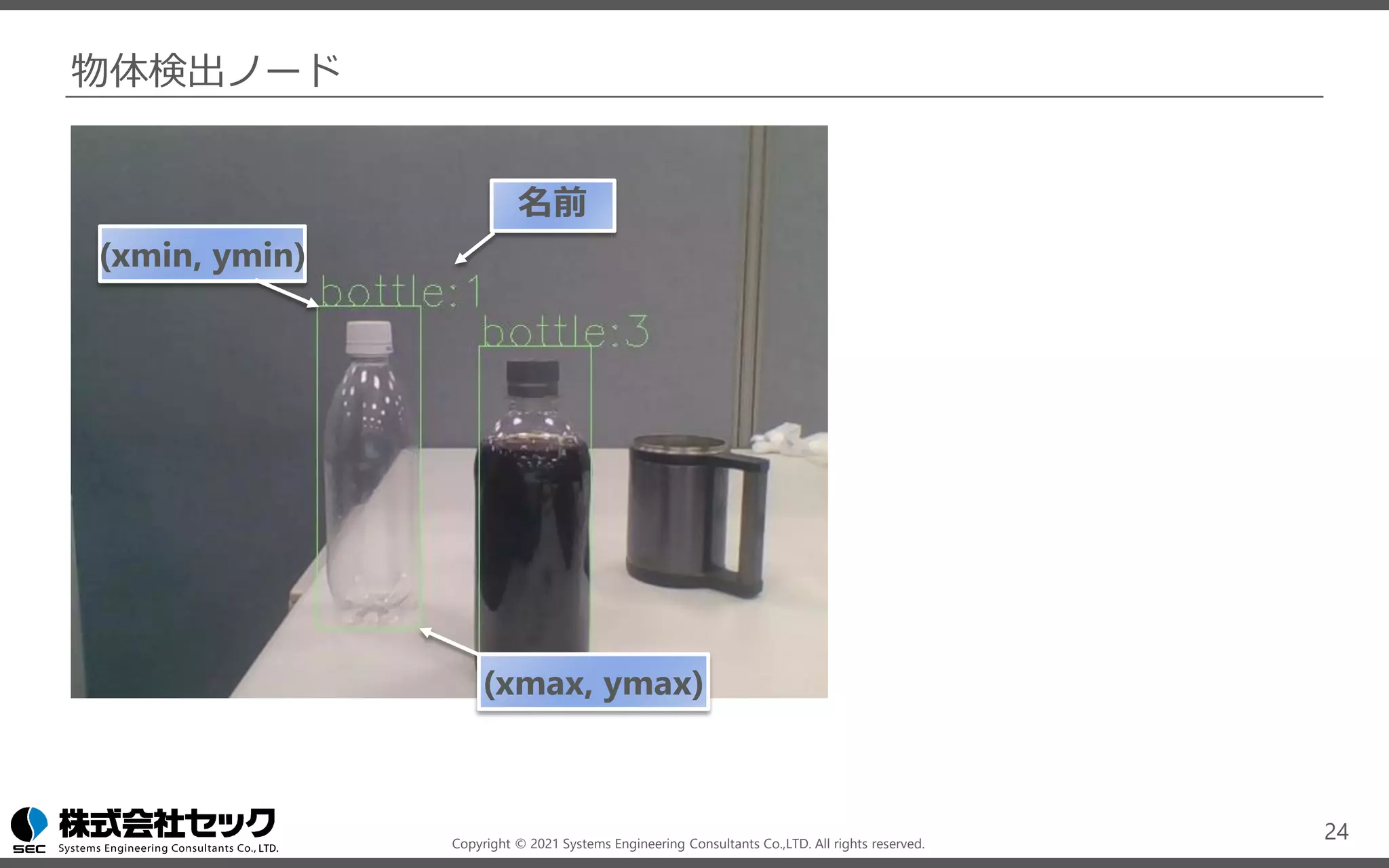
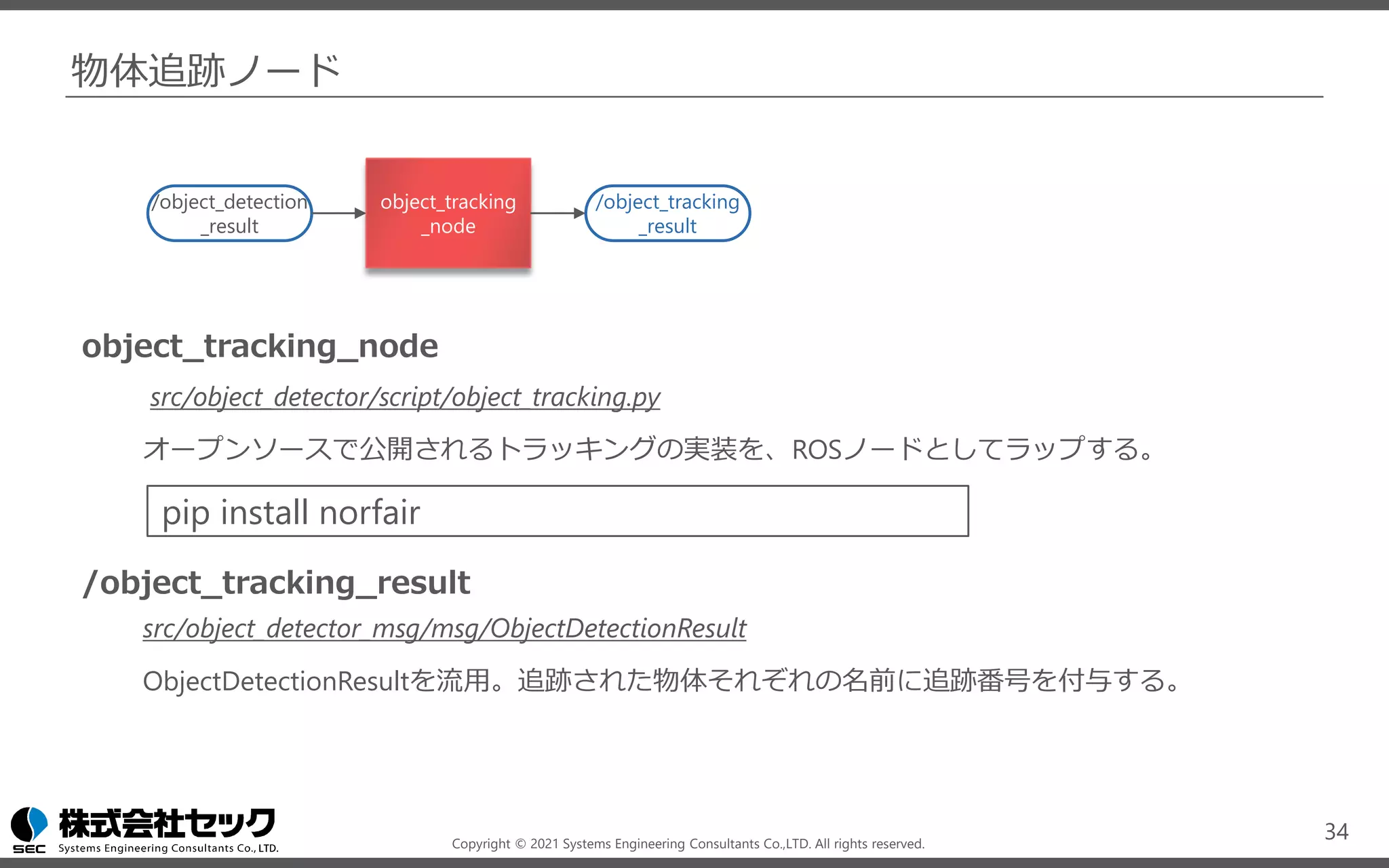
物体検出ノード
/object_detecter_result
src/object_detector_msg/msg/ObjectDetectionResult.msg
src/object_detector_msg/msg/DetectedObject.msg
物体検出を結果を、独自のメッセージとして
定義する。
22
object_detector
_yolo_node
/object_detection
_result
/preproessed
_image
DetectedObject
xmin float64
xmax float64
ymin float64
ymax float64
confidence float64
class_id int64
name string
ObjectDetectionResult
detected_objects DetectedObject[]
物体の検出位置
検出の信頼度
物体の分類ID
物体の名前](https://image.slidesharecdn.com/0301ai01-210329121802/75/NEDO-_-AI-_-22-2048.jpg)




























![[CEDEC2014]モバイルゲームにおける社内基盤開発と“実録”](https://cdn.slidesharecdn.com/ss_thumbnails/cedec201409-04-140924054142-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)



















