Radar Basics
- Primaryradar is very simple in principle
- However:
- high RF-energy is needed
- useful signals (echo or return) are very small
- interferences are very large
- useful signals contain significant information
- analysis and signal processing is quite complex
Simple in Concept – Complex in Reality
RAdio Detection And Ranging
2.
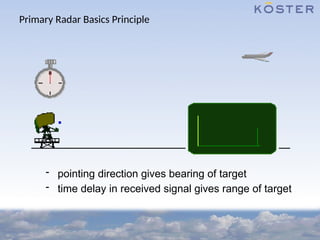
Primary Radar BasicsPrinciple
- pointing direction gives bearing of target
- time delay in received signal gives range of target
3.
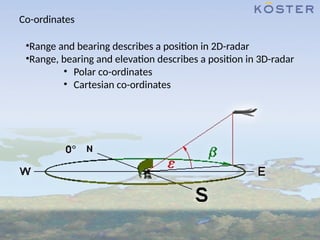
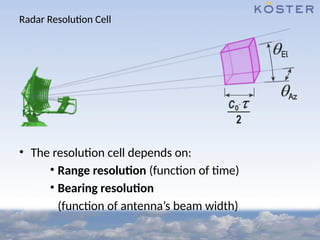
Co-ordinates
•Range and bearingdescribes a position in 2D-radar
•Range, bearing and elevation describes a position in 3D-radar
• Polar co-ordinates
• Cartesian co-ordinates
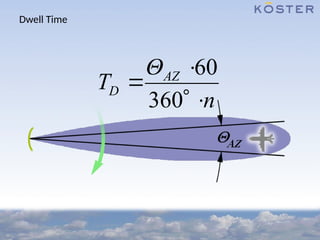
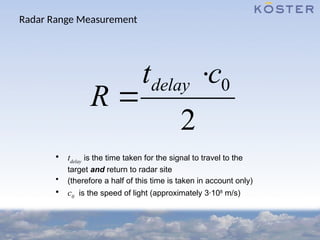
Radar Range Measurement
•tdelay
is the time taken for the signal to travel to the
target and return to radar site
• (therefore a half of this time is taken in account only)
• c0
is the speed of light (approximately 3·108
m/s)
0
2
delay
t c
R
8.
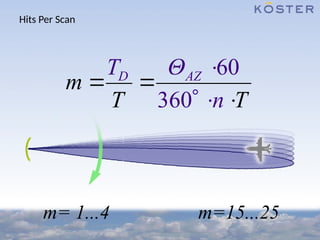
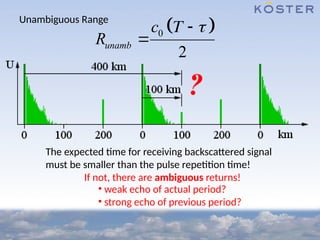
Unambiguous Range
The expectedtime for receiving backscattered signal
must be smaller than the pulse repetition time!
If not, there are ambiguous returns!
• weak echo of actual period?
• strong echo of previous period?
0
2
unamb
c
R
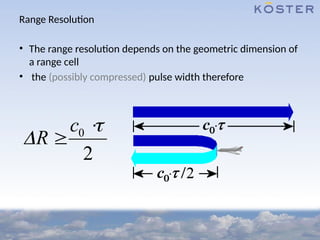
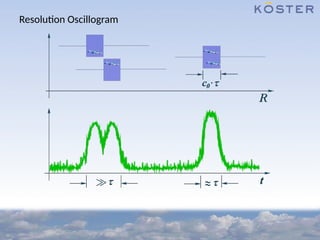
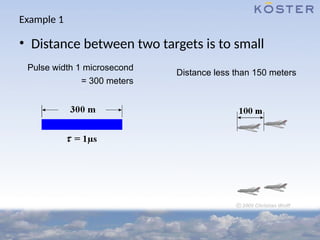
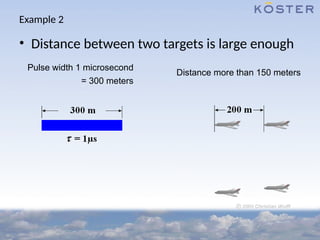
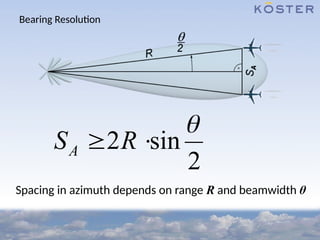
Range Resolution
• Therange resolution depends on the geometric dimension of
a range cell
• the (possibly compressed) pulse width therefore
0
2
c
R
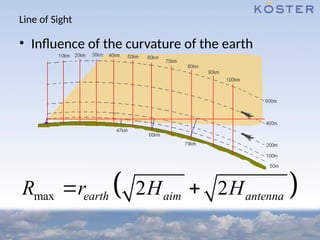
• Influence ofthe curvature of the earth
Line of Sight
max 2 2
earth aim antenna
R r H H
19.
• Influence ofrefraction
Radar Horizon
max aim antenna
max aim antenna
[km] ( in Meters)
[NM] ( in Feet)
4.12
1.23
H
H
R H H
R H H
20.
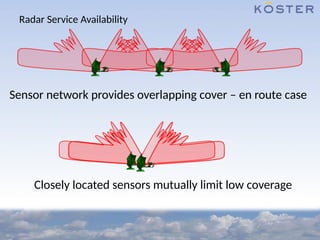
Radar Service Availability
Sensornetwork provides overlapping cover – en route case
Closely located sensors mutually limit low coverage
21.
Operational Availability
• Ratioof radars operational time
– in hours, or (e.g.: 1000 h)
– in percent (e.g.: 99.9 %)
in relation to the
• Non-operational time
– needed maintenance time
– probability of hardware faults


![• Influence of refraction
Radar Horizon
max aim antenna
max aim antenna
[km] ( in Meters)
[NM] ( in Feet)
4.12
1.23
H
H
R H H
R H H
](https://image.slidesharecdn.com/radarbasics1-251215211153-4f107ead/85/Radar-Basics-mainly-cfar-for-target-pptx-19-320.jpg)