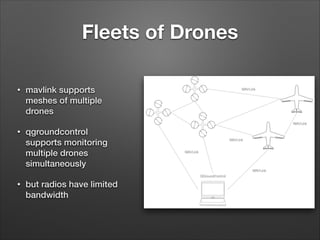
The document outlines a workshop by Todd Stellanova on PX4 quadcopters, discussing components such as flight control boards, setup procedures, and safety measures. It details the Pixhawk project and its components, emphasizing the open-source nature of the firmware, software, and hardware designs. Additionally, it covers the calibration process, flight modes, waypoints, battery monitoring, failsafes, and advanced features for multiple drone fleets.