Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Taikai Takeda
PDF, PPTX
1,703 views
Prml 4.3
PRML 4.3 discriminative model
Science
◦
Read more
2
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 14
2
/ 14
3
/ 14
4
/ 14
5
/ 14
6
/ 14
7
/ 14
8
/ 14
9
/ 14
10
/ 14
11
/ 14
12
/ 14
13
/ 14
14
/ 14
More Related Content
PDF
PRML勉強会@長岡 第4章線形識別モデル
by
Shohei Okada
PDF
Prml 4
by
Satoshi Kawamoto
PDF
Prml4 1-4-2
by
Masahiro Kazama
PPTX
PRMLrevenge 4.4
by
Naoya Nakamura
PDF
PRML第3章@京大PRML輪講
by
Sotetsu KOYAMADA(小山田創哲)
PDF
Prml 3 3.3
by
Arata Honda
PDF
PRML輪読#3
by
matsuolab
PDF
PRML輪読#4
by
matsuolab
PRML勉強会@長岡 第4章線形識別モデル
by
Shohei Okada
Prml 4
by
Satoshi Kawamoto
Prml4 1-4-2
by
Masahiro Kazama
PRMLrevenge 4.4
by
Naoya Nakamura
PRML第3章@京大PRML輪講
by
Sotetsu KOYAMADA(小山田創哲)
Prml 3 3.3
by
Arata Honda
PRML輪読#3
by
matsuolab
PRML輪読#4
by
matsuolab
What's hot
PPTX
PRML 3.5.2, 3.5.3, 3.6
by
Kohei Tomita
PDF
2013.12.26 prml勉強会 線形回帰モデル3.2~3.4
by
Takeshi Sakaki
PDF
[PRML] パターン認識と機械学習(第3章:線形回帰モデル)
by
Ryosuke Sasaki
PDF
PRML輪読#14
by
matsuolab
PPTX
PRML Chapter 5
by
Masahito Ohue
PPTX
2014.01.23 prml勉強会4.2確率的生成モデル
by
Takeshi Sakaki
PPTX
Prml 1.3~1.6 ver3
by
Toshihiko Iio
PDF
PRML輪読#5
by
matsuolab
PDF
[PRML勉強会資料] パターン認識と機械学習 第3章 線形回帰モデル (章頭-3.1.5)(p.135-145)
by
Itaru Otomaru
PDF
PRML輪読#6
by
matsuolab
PPTX
Back propagation
by
T2C_
PDF
PRML輪読#1
by
matsuolab
PDF
Prml3.5 エビデンス近似〜
by
Yuki Matsubara
PDF
PRML輪読#7
by
matsuolab
PDF
「3.1.2最小二乗法の幾何学」PRML勉強会4 @筑波大学 #prml学ぼう
by
Junpei Tsuji
PDF
[PRML] パターン認識と機械学習(第1章:序論)
by
Ryosuke Sasaki
PPTX
PRML読み会第一章
by
Takushi Miki
PPTX
PRMLrevenge_3.3
by
Naoya Nakamura
PDF
PRML輪読#10
by
matsuolab
PDF
PRML輪読#8
by
matsuolab
PRML 3.5.2, 3.5.3, 3.6
by
Kohei Tomita
2013.12.26 prml勉強会 線形回帰モデル3.2~3.4
by
Takeshi Sakaki
[PRML] パターン認識と機械学習(第3章:線形回帰モデル)
by
Ryosuke Sasaki
PRML輪読#14
by
matsuolab
PRML Chapter 5
by
Masahito Ohue
2014.01.23 prml勉強会4.2確率的生成モデル
by
Takeshi Sakaki
Prml 1.3~1.6 ver3
by
Toshihiko Iio
PRML輪読#5
by
matsuolab
[PRML勉強会資料] パターン認識と機械学習 第3章 線形回帰モデル (章頭-3.1.5)(p.135-145)
by
Itaru Otomaru
PRML輪読#6
by
matsuolab
Back propagation
by
T2C_
PRML輪読#1
by
matsuolab
Prml3.5 エビデンス近似〜
by
Yuki Matsubara
PRML輪読#7
by
matsuolab
「3.1.2最小二乗法の幾何学」PRML勉強会4 @筑波大学 #prml学ぼう
by
Junpei Tsuji
[PRML] パターン認識と機械学習(第1章:序論)
by
Ryosuke Sasaki
PRML読み会第一章
by
Takushi Miki
PRMLrevenge_3.3
by
Naoya Nakamura
PRML輪読#10
by
matsuolab
PRML輪読#8
by
matsuolab
Viewers also liked
PDF
PRML上巻勉強会 at 東京大学 資料 第4章4.3.1 〜 4.5.2
by
Hiroyuki Kato
PDF
PRML 第4章
by
Akira Miyazawa
PPTX
医療データ解析界隈から見たICLR2017
by
RIKEN, Medical Sciences Innovation Hub Program (MIH)
PDF
言葉のもつ広がりを、モデルの学習に活かそう -one-hot to distribution in language modeling-
by
Takahiro Kubo
PDF
Semi-Supervised Classification with Graph Convolutional Networks @ICLR2017読み会
by
Eiji Sekiya
PDF
[ICLR2017読み会 @ DeNA] ICLR2017紹介
by
Takeru Miyato
PDF
ICLR2017読み会 Data Noising as Smoothing in Neural Network Language Models @Dena
by
Takanori Nakai
PDF
ICLR読み会 奥村純 20170617
by
Jun Okumura
PDF
170614 iclr reading-public
by
Katsuhiko Ishiguro
PDF
Q prop
by
Reiji Hatsugai
PRML上巻勉強会 at 東京大学 資料 第4章4.3.1 〜 4.5.2
by
Hiroyuki Kato
PRML 第4章
by
Akira Miyazawa
医療データ解析界隈から見たICLR2017
by
RIKEN, Medical Sciences Innovation Hub Program (MIH)
言葉のもつ広がりを、モデルの学習に活かそう -one-hot to distribution in language modeling-
by
Takahiro Kubo
Semi-Supervised Classification with Graph Convolutional Networks @ICLR2017読み会
by
Eiji Sekiya
[ICLR2017読み会 @ DeNA] ICLR2017紹介
by
Takeru Miyato
ICLR2017読み会 Data Noising as Smoothing in Neural Network Language Models @Dena
by
Takanori Nakai
ICLR読み会 奥村純 20170617
by
Jun Okumura
170614 iclr reading-public
by
Katsuhiko Ishiguro
Q prop
by
Reiji Hatsugai
Similar to Prml 4.3
PPTX
PRML4.3
by
hiroki yamaoka
PDF
PRML セミナー
by
sakaguchi050403
PPTX
Prml14th 10.7
by
ruto5
PPTX
パターン認識モデル初歩の初歩
by
t_ichioka_sg
PDF
PRML第3章_3.3-3.4
by
Takashi Tamura
PDF
PRML 6.4-6.5
by
正志 坪坂
PDF
わかりやすいパターン認識 4章
by
Motokawa Tetsuya
PDF
[DSO]勉強会_データサイエンス講義_Chapter5
by
tatsuyasakaeeda
PDF
【Zansa】第12回勉強会 -PRMLからベイズの世界へ
by
Zansa
PDF
PRML 4.1 輪講スライド
by
KawaAkimune
PDF
Prml1.2.3
by
Tomoyuki Hioki
PPTX
PRML1.1
by
Tomoyuki Hioki
PDF
Prml1.2.1~1.2.2
by
Tomoyuki Hioki
PDF
PRML 1.5-1.5.5 決定理論
by
Akihiro Nitta
PDF
PRML 4.1 Discriminant Function
by
Shintaro Takemura
PPTX
ラビットチャレンジレポート 機械学習
by
ssuserf4860b
PDF
20191117_choco_bayes_pub
by
Yoichi Tokita
PDF
Bishop prml 10.2.2-10.2.5_wk77_100412-0059
by
Wataru Kishimoto
PDF
数理モデリングからはじめるPython数理最適化 PyData.Tokyo 2017/6/28 Retty Inc. Iwanaga Jiro
by
Jiro Iwanaga
PPTX
PRML1.5
by
hiroki yamaoka
PRML4.3
by
hiroki yamaoka
PRML セミナー
by
sakaguchi050403
Prml14th 10.7
by
ruto5
パターン認識モデル初歩の初歩
by
t_ichioka_sg
PRML第3章_3.3-3.4
by
Takashi Tamura
PRML 6.4-6.5
by
正志 坪坂
わかりやすいパターン認識 4章
by
Motokawa Tetsuya
[DSO]勉強会_データサイエンス講義_Chapter5
by
tatsuyasakaeeda
【Zansa】第12回勉強会 -PRMLからベイズの世界へ
by
Zansa
PRML 4.1 輪講スライド
by
KawaAkimune
Prml1.2.3
by
Tomoyuki Hioki
PRML1.1
by
Tomoyuki Hioki
Prml1.2.1~1.2.2
by
Tomoyuki Hioki
PRML 1.5-1.5.5 決定理論
by
Akihiro Nitta
PRML 4.1 Discriminant Function
by
Shintaro Takemura
ラビットチャレンジレポート 機械学習
by
ssuserf4860b
20191117_choco_bayes_pub
by
Yoichi Tokita
Bishop prml 10.2.2-10.2.5_wk77_100412-0059
by
Wataru Kishimoto
数理モデリングからはじめるPython数理最適化 PyData.Tokyo 2017/6/28 Retty Inc. Iwanaga Jiro
by
Jiro Iwanaga
PRML1.5
by
hiroki yamaoka
Prml 4.3
1.
PRML 4.3 確率的識別モデル
1
2.
Agenda ✓ 確率的識別モデル
✓ ロジスティック回帰(ほとんどコレ) ✓ プロビット回帰 2
3.
確率的識別モデル 生成モデル(Generative Model)
✓ 周辺分布p(x)から人口データを生成できる ✓ 外れ値検出などができる点で有利 識別モデル(Discriminative Model) ✓ まずp(Ck|x)の形を決めてそのパラメータを求める ✓ パラメータが少ない 3
4.
ロジスティック回帰 ✓ 回帰という名前が付いているが分類のためのモデル
(紛らわしい...) ✓ ロジスティックシグモイド関数を活性化関数に選ん でいる ✓ 誤差関数を求め,最小化するパラメータを求める ✓ 解析的に解けないためNewton-Raphson法を用いる 4
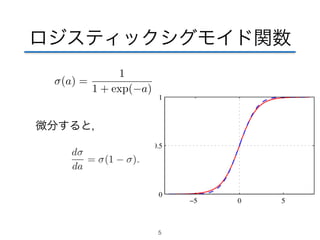
5.
ロジスティックシグモイド関数 微分すると, 5
(a) = 1 1 + exp(a)
6.
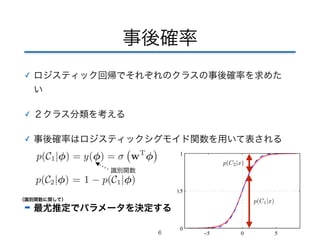
事後確率 ✓ ロジスティック回帰でそれぞれのクラスの事後確率を求めた
い ✓ 2クラス分類を考える ✓ 事後確率はロジスティックシグモイド関数を用いて表される ➡ 最尤推定でパラメータを決定する 6 p(C1|x) p(C2|x) 識別関数 (識別関数に関して)
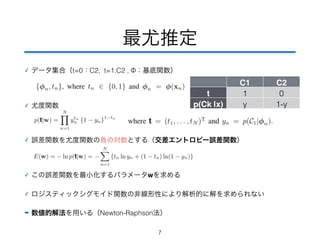
7.
最尤推定 ✓ データ集合(t=0:C2,
t=1:C2 , Φ:基底関数) ✓ 尤度関数 ✓ 誤差関数を尤度関数の負の対数とする(交差エントロピー誤差関数) ✓ この誤差関数を最小化するパラメータwを求める ✓ ロジスティックシグモイド関数の非線形性により解析的に解を求められない ➡ 数値的解法を用いる(Newton-Raphson法) 7 C1 C2 t 1 0 p(Ck |x) y 1-y
8.
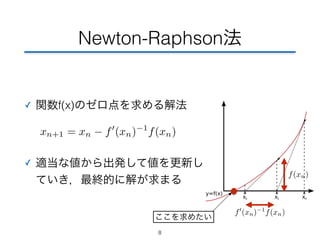
Newton-Raphson法 ✓ 関数f(x)のゼロ点を求める解法
xn+1 = xn f0(xn)−1f(xn) ✓ 適当な値から出発して値を更新し ていき,最終的に解が求まる 8 f0(xn)−1f(xn) f(xn) ここを求めたい
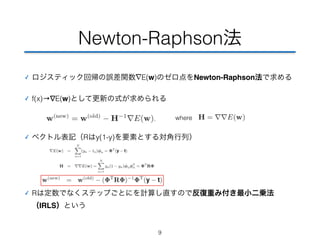
9.
Newton-Raphson法 ✓ ロジスティック回帰の誤差関数∇E(w)のゼロ点をNewton-Raphson法で求める
✓ f(x)→∇E(w)として更新の式が求められる ✓ ベクトル表記(Rはy(1-y)を要素とする対角行列) ✓ Rは定数でなくステップごとにを計算し直すので反復重み付き最小二乗法 (IRLS)という 9 where
10.
最小解の唯一性 ✓ ヘッセ行列Hが正定値行列
✓ よってEは凸関数 ✓ よってEは唯一の最小解を持つ ✓ (時間があったら証明...) 10
11.
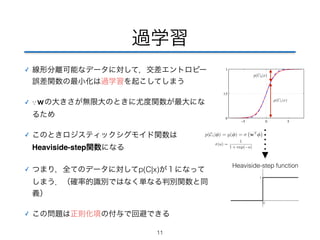
過学習 ✓ 線形分離可能なデータに対して,交差エントロピー
誤差関数の最小化は過学習を起こしてしまう ✓ ∵wの大きさが無限大のときに尤度関数が最大にな るため ✓ このときロジスティックシグモイド関数は Heaviside-step関数になる ✓ つまり,全てのデータに対してp(C|x)が1になって しまう.(確率的識別ではなく単なる判別関数と同 義) ✓ この問題は正則化項の付与で回避できる 11 p(C1|x) p(C2|x) Heaviside-step function (a) = 1 1 + exp(a)
12.
パラメータ数 ✓ 識別モデルでは生成モデルに比べてパラメータ数が少なくて済む
✓ M次元特徴空間で調整可能なパラメータ数を考える ✓ 生成モデルではクラス条件付き密度p(x|Ck)をガウス分布で表し た ➡ 共分散行列のパラメータの決定を含むのでパラメータの数は O(M^2) ✓ 一方,ロジスティック回帰で必要なパラメータ数はO(M)(実際 にはM個ちょうど) 12
13.
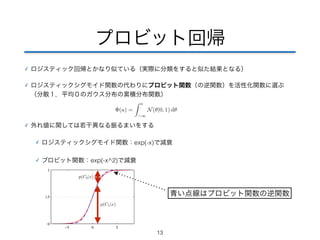
プロビット回帰 ✓ ロジスティック回帰とかなり似ている(実際に分類をすると似た結果となる)
✓ ロジスティックシグモイド関数の代わりにプロビット関数(の逆関数)を活性化関数に選ぶ (分散1,平均0のガウス分布の累積分布関数) ✓ 外れ値に関しては若干異なる振るまいをする ✓ ロジスティックシグモイド関数:exp(-x)で減衰 ✓ ブロビット関数:exp(-x^2)で減衰 13 p(C1|x) p(C2|x) 青い点線はプロビット関数の逆関数
14.
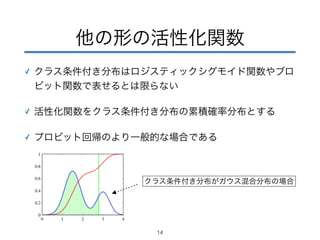
他の形の活性化関数 ✓ クラス条件付き分布はロジスティックシグモイド関数やブロ
ビット関数で表せるとは限らない ✓ 活性化関数をクラス条件付き分布の累積確率分布とする ✓ プロビット回帰のより一般的な場合である クラス条件付き分布がガウス混合分布の場合 14
Download












![[PRML] パターン認識と機械学習(第3章:線形回帰モデル)](https://cdn.slidesharecdn.com/ss_thumbnails/prmlchapter3-171003081954-thumbnail.jpg?width=640&height=640&fit=bounds)





![[PRML勉強会資料] パターン認識と機械学習 第3章 線形回帰モデル (章頭-3.1.5)(p.135-145)](https://cdn.slidesharecdn.com/ss_thumbnails/prmlp-150228215621-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)






![[PRML] パターン認識と機械学習(第1章:序論)](https://cdn.slidesharecdn.com/ss_thumbnails/prmlchapter1-170903070406-thumbnail.jpg?width=640&height=640&fit=bounds)









![[ICLR2017読み会 @ DeNA] ICLR2017紹介](https://cdn.slidesharecdn.com/ss_thumbnails/iclr2017denaiclr2017-170616173153-thumbnail.jpg?width=640&height=640&fit=bounds)











![[DSO]勉強会_データサイエンス講義_Chapter5](https://cdn.slidesharecdn.com/ss_thumbnails/dsodatasciencelecturechapter5-190828055857-thumbnail.jpg?width=640&height=640&fit=bounds)











