This document contains summaries of several projects related to data analysis, machine learning, control systems, mechanical design, and solving differential equations:
1) A price prediction model for Austin real estate that achieves over 80% accuracy and an interactive visualization of the results.
2) Implementing and visualizing stochastic gradient descent algorithms on 70,000 images of handwritten digits.
3) Comparing controllers for synchronizing Chua's oscillator system and synchronizing the nonlinear system with sliding mode and backstepping controllers.
4) System identification and forecasting of a series-elastic actuator using a recurrent neural network model.
A Virtual Machine Placement Algorithm for Energy Efficient Cloud Resource Res...SuvomDas
In this slide, we are going to discuss a new graph colouring model for advance resource reservation with minimum energy consumption in heterogeneous IaaS cloud data centres. We will start with an exact integer linear programming (ILP) formulation which generalises the graph colouring problem mathematically and follow with a Energy Efficient Graph Pre colouring (EEGP) heuristic to address the scalability and to reduce convergence times. The results of performance evaluation and comparisons of EEGP with the exact algorithm will demonstrate the efficiency of EEGP for the energy efficient advance resource reservation problem.
We will see the efficiency of the EEGP algorithm by comparing it with the exact integer linear programming solution
— Parallel Prefix adders have been one of the most
notable among several designs proposed in the past. The
advantage of utilizing the flexibility in implementing these
structures based upon through put requirements. Due to
continuing integrating intensity and the growing needs of
portable devices, low power and high performance designs are of
prime importance. The classical parallel prefix adder structures
presented in the literature over the years optimize for logic depth,
area, and fan-out and interconnect count of logic circuits. In this
proposed system, Kogge-Stone adder which is one of types of
parallel prefix adder is used. Kogge stone is the fastest adder
because of its minimum fan-out. When parallel prefix adder is
compared with classical adders it is advantageous in every aspect.
The study reveals that Parallel Prefix adder has the least power
delay product when compared with its peer existing adder
structures (Ripple carry adder, Carry save adders etc).
Simulation results are verified using Xilinx 10.1 and
MODELSIM 6.4a softwares.
IEEE EED2021 Introduction to Quantum ComputingSAMeh Zaghloul
Introduction to Quantum Computing
Introduction and Overview about Quantum Computing basic concepts, starting from the definition of Quantum Bit (qubit), Quantum Superposition, Entanglement, |Bra-ket> Notation, Unitary Matrix, Quantum Circuits, and “Basic” Logic Gates.
Introducing Qiskit (IBM’s Open Source Quantum SDK) as well IBM Quantum Experience (Quantum Composer and Quantum Jupyter/Lab), covering some Qiskit's sample application modules in Finance, Physics, Machine Learning, and Optimization, with main objective of increasing the awareness of Junior IEEE members about IBM’s Quantum Ecosystem and available free/open source tools/platforms that can help researchers and contribute in future/current M.Sc. and Ph.D. thesis.
A Virtual Machine Placement Algorithm for Energy Efficient Cloud Resource Res...SuvomDas
In this slide, we are going to discuss a new graph colouring model for advance resource reservation with minimum energy consumption in heterogeneous IaaS cloud data centres. We will start with an exact integer linear programming (ILP) formulation which generalises the graph colouring problem mathematically and follow with a Energy Efficient Graph Pre colouring (EEGP) heuristic to address the scalability and to reduce convergence times. The results of performance evaluation and comparisons of EEGP with the exact algorithm will demonstrate the efficiency of EEGP for the energy efficient advance resource reservation problem.
We will see the efficiency of the EEGP algorithm by comparing it with the exact integer linear programming solution
— Parallel Prefix adders have been one of the most
notable among several designs proposed in the past. The
advantage of utilizing the flexibility in implementing these
structures based upon through put requirements. Due to
continuing integrating intensity and the growing needs of
portable devices, low power and high performance designs are of
prime importance. The classical parallel prefix adder structures
presented in the literature over the years optimize for logic depth,
area, and fan-out and interconnect count of logic circuits. In this
proposed system, Kogge-Stone adder which is one of types of
parallel prefix adder is used. Kogge stone is the fastest adder
because of its minimum fan-out. When parallel prefix adder is
compared with classical adders it is advantageous in every aspect.
The study reveals that Parallel Prefix adder has the least power
delay product when compared with its peer existing adder
structures (Ripple carry adder, Carry save adders etc).
Simulation results are verified using Xilinx 10.1 and
MODELSIM 6.4a softwares.
IEEE EED2021 Introduction to Quantum ComputingSAMeh Zaghloul
Introduction to Quantum Computing
Introduction and Overview about Quantum Computing basic concepts, starting from the definition of Quantum Bit (qubit), Quantum Superposition, Entanglement, |Bra-ket> Notation, Unitary Matrix, Quantum Circuits, and “Basic” Logic Gates.
Introducing Qiskit (IBM’s Open Source Quantum SDK) as well IBM Quantum Experience (Quantum Composer and Quantum Jupyter/Lab), covering some Qiskit's sample application modules in Finance, Physics, Machine Learning, and Optimization, with main objective of increasing the awareness of Junior IEEE members about IBM’s Quantum Ecosystem and available free/open source tools/platforms that can help researchers and contribute in future/current M.Sc. and Ph.D. thesis.
This is the first poster I presented as part of my PhD. It focuses on executing N-body simulations using GRAPE specialized hardware on machines in different continents.
C-SAW: A Framework for Graph Sampling and Random Walk on GPUsPandey_G
Presentation for the paper C-SAW: A Framework for Graph Sampling and Random Walk on GPUs published in SC20.
Paper link: https://arxiv.org/pdf/2009.09103.pdf
System analysis using solidThinking Activate by Altair - Seminario Spin all'Università dell'Aquila su software Activate, elettrificazione e nuove frontiere della ricerca
What is a real-time recommendation engine? Our Senior Software Engineer, David Lippa, and our CTO, Jason Vertrees, break down the background, method, and results.
Giancarlo Sudano - Welcome to the Quantum Age - A lap around Microsoft Quantu...Codemotion
Fuga nel mondo della computazione quantistica e di come questo potrebbe cambiare per sempre la nostra società come oggi la conosciamo, vista dagli occhi di uno sviluppatore di codice. Inoltre con il Microsoft Quantum Developer Kit, Visual Studio Code e Q# scriveremo qualche riga di codice per far muovere "virtualmente" i primi Qbit.
The presentation with the topic AI methods for localization in a noisy environment, held by Ana Antonova and Kameliya Kosekova, was introduced at Robotics Days '19.
In the next slides, you can find information techniques for Robot localization in more details and several GitHub Repos on the topic.
This is the first poster I presented as part of my PhD. It focuses on executing N-body simulations using GRAPE specialized hardware on machines in different continents.
C-SAW: A Framework for Graph Sampling and Random Walk on GPUsPandey_G
Presentation for the paper C-SAW: A Framework for Graph Sampling and Random Walk on GPUs published in SC20.
Paper link: https://arxiv.org/pdf/2009.09103.pdf
System analysis using solidThinking Activate by Altair - Seminario Spin all'Università dell'Aquila su software Activate, elettrificazione e nuove frontiere della ricerca
What is a real-time recommendation engine? Our Senior Software Engineer, David Lippa, and our CTO, Jason Vertrees, break down the background, method, and results.
Giancarlo Sudano - Welcome to the Quantum Age - A lap around Microsoft Quantu...Codemotion
Fuga nel mondo della computazione quantistica e di come questo potrebbe cambiare per sempre la nostra società come oggi la conosciamo, vista dagli occhi di uno sviluppatore di codice. Inoltre con il Microsoft Quantum Developer Kit, Visual Studio Code e Q# scriveremo qualche riga di codice per far muovere "virtualmente" i primi Qbit.
The presentation with the topic AI methods for localization in a noisy environment, held by Ana Antonova and Kameliya Kosekova, was introduced at Robotics Days '19.
In the next slides, you can find information techniques for Robot localization in more details and several GitHub Repos on the topic.
Word and Actions, these words would have meaning only if it is activated. Meaning, it has an action. Words are not enough, words are good enough but not good enough without actions.
Each of these are hard to follow :0
Qubit models and methods for improving the performance of software and hardware for
analyzing digital devices through increasing the dimension of the data structures and memory
are proposed. The basic concepts, terminology and definitions necessary for the implementation
of quantum computing when analyzing virtual computers are introduced. The investigation results concerning design and modeling computer systems in a cyberspace based on the use of two-component structure <memory> are presented.
International Journal of Engineering Inventions (IJEI) provides a multidisciplinary passage for researchers, managers, professionals, practitioners and students around the globe to publish high quality, peer-reviewed articles on all theoretical and empirical aspects of Engineering and Science.
The peer-reviewed International Journal of Engineering Inventions (IJEI) is started with a mission to encourage contribution to research in Science and Technology. Encourage and motivate researchers in challenging areas of Sciences and Technology.
A seminar talk about relation between quantum and fuzzy logic and its applications, especially fuzzy quantum circuits to model emotional behaviours of humanoid robots
Josh Patterson, Principal at Patterson Consulting: Introduction to Parallel Iterative Machine Learning Algorithms on Hadoop’s NextGeneration YARN Framework
Exact Cell Decomposition of Arrangements used for Path Planning in RoboticsUmair Amjad
This is short overview of research paper.
We present a practical algorithm for the automatic generation of a map that describes the operation environment of an indoor mobile service robot. The input is a CAD description of a building consisting of line segments that represent the walls. The algorithm is based on the exact cell decomposition obtained when these segments are extended to infinite lines, resulting in a line arrangement. The cells are represented by nodes in a connectivity graph. The map consists of the connectivity graph and additional environmental information that is calculated for each cell. The method takes into account both the path planning and position verification requirements of the robot and has been implemented.
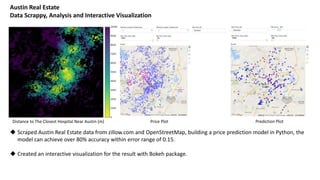
1. Distance to The Closest Hospital Near Austin (m) Price Plot Prediction Plot
Scraped Austin Real Estate data from zillow.com and OpenStreetMap, building a price prediction model in Python, the
model can achieve over 80% accuracy within error range of 0.15.
Created an interactive visualization for the result with Bokeh package.
Austin Real Estate
Data Scrappy, Analysis and Interactive Visualization
2. Digit Example Squared Loss Gradient Method Multinomial Logistic Gradient Method
Implemented and visualized the stochastic gradient descent with K-Means and Multinomial logistic classifier on 70,000
handwritten digits images.
Built parallel code and executed it on multiple engines to solve the large scale problems.
Handwritten Digits Classification
3. Chua's Circuit Schematic Synchronization Two perfect model Phase Trajectory of the Two Sychronized Oscillator
Compared performance of Linear Feedback, Sliding Mode, Back Stepping and different controllers on Chuas's Oscillator.
Synchronized the the nonlinear system with one input using Sliding Mode and Lypunov Function based Back Stepping
controller with MATLAB.
Cubic Nonlinearity Chua's Oscillator
Control and Synchronization
4. SEA(Series-Elastic Actuator)
Designed and built by Nicholas Paine in the HCRL
Recurrent Network testing result(Mixed Sinusoid Input)
Designed a recurrent network to model the actuator
system with Neuro-Bondgraph.
Trained and tested the model with MATLAB Neural
Network Toolbox to identify the actual constitutive
relations of the system, spring force and damping force.
System Identification and Forecasting
of Series-Elastic Actuator
Recurrent Network (Neuro-Bondgraph) Representation
5. CAD Layout Final Product
Completed the CAD design of a
moving Castle in the Games of
Thrones opening theme(The Eyrie).
Finished building it with laser cutter,
3D printer, lathe, drill and other
machine tools.
Games of Thrones Castle Design
6. DaNI(NI LabVIEW Robotics Starter Kit) Schematic of closed loop control with Kalman Filter Actual trajectory of DaNI
Implemented Real-Time closed loop path control on NI Single-Board RIO Robot with LabView
Full-state Closed Loop Control of DaNI
7. Schematic of Fully Differential Op-Amp Integrator)
Solution for Second Order ODE
HxC Analog Integrator Voltage
Designed and Simulated the algorithm to solve ODEs with
UT hybrid computer (mixed signal computer) prototype
board in MATLAB environment.
HxC Scaling Algorithm Applied to
First and Second Order Ordinary Differential Equations