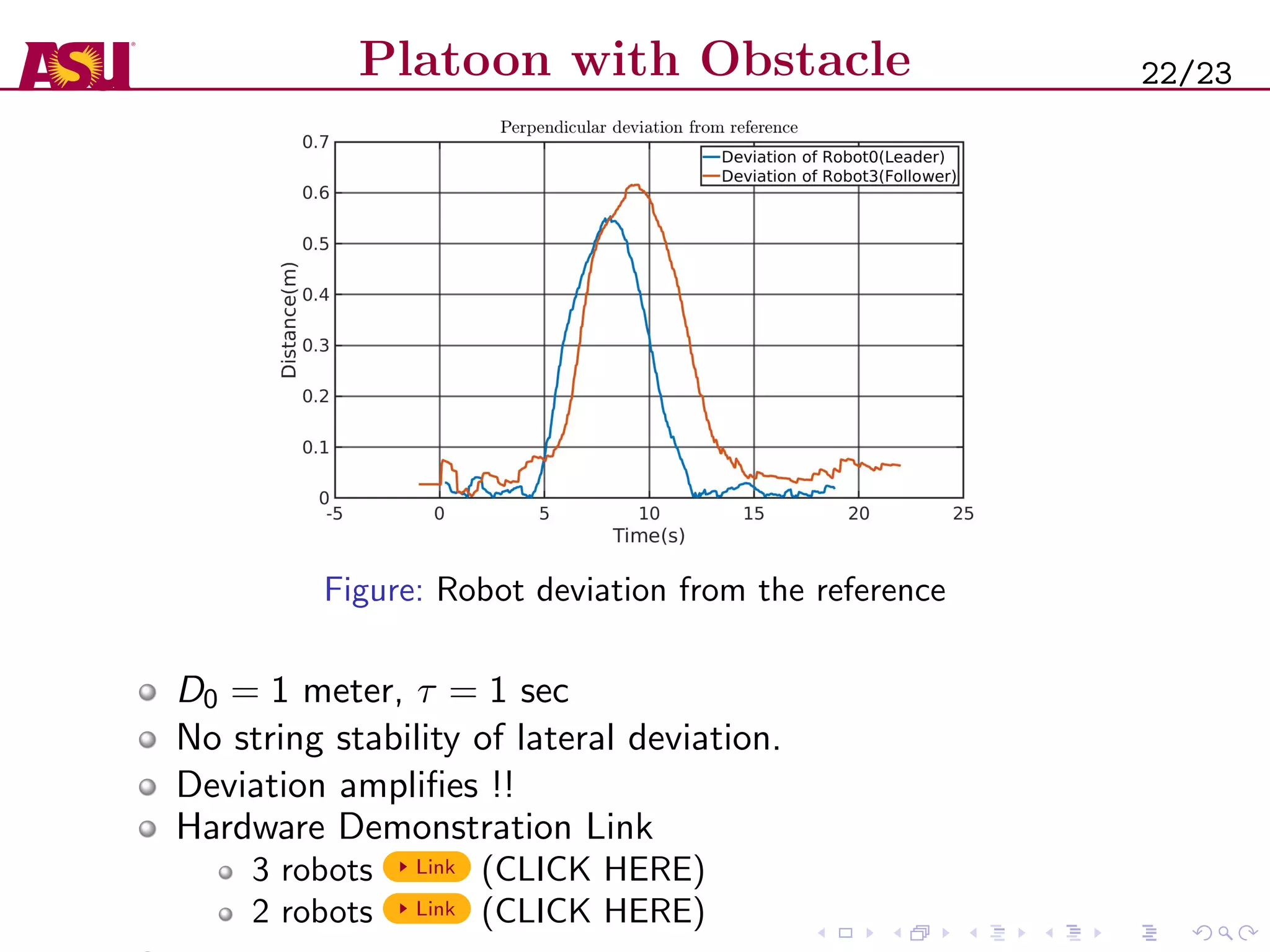
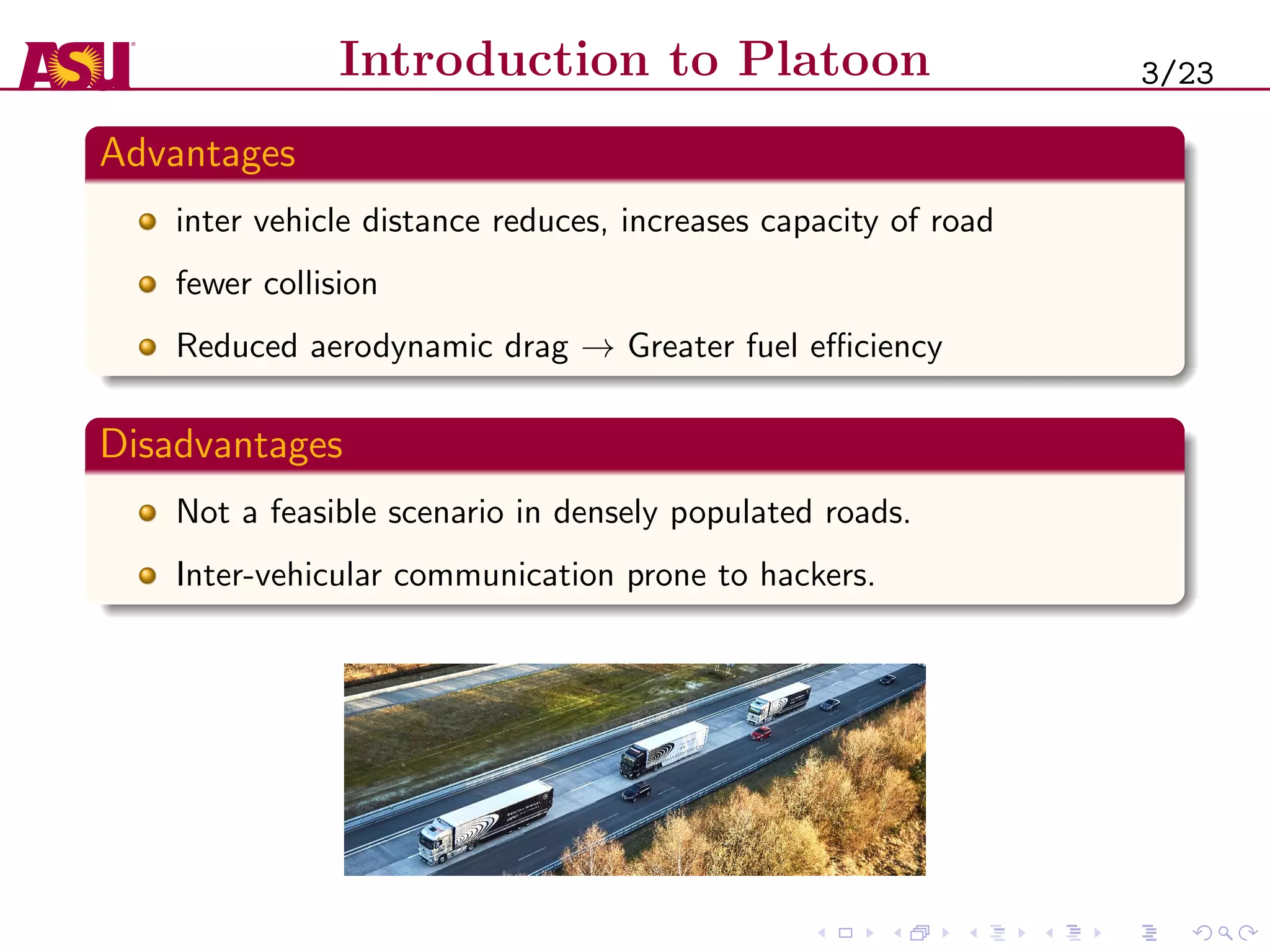
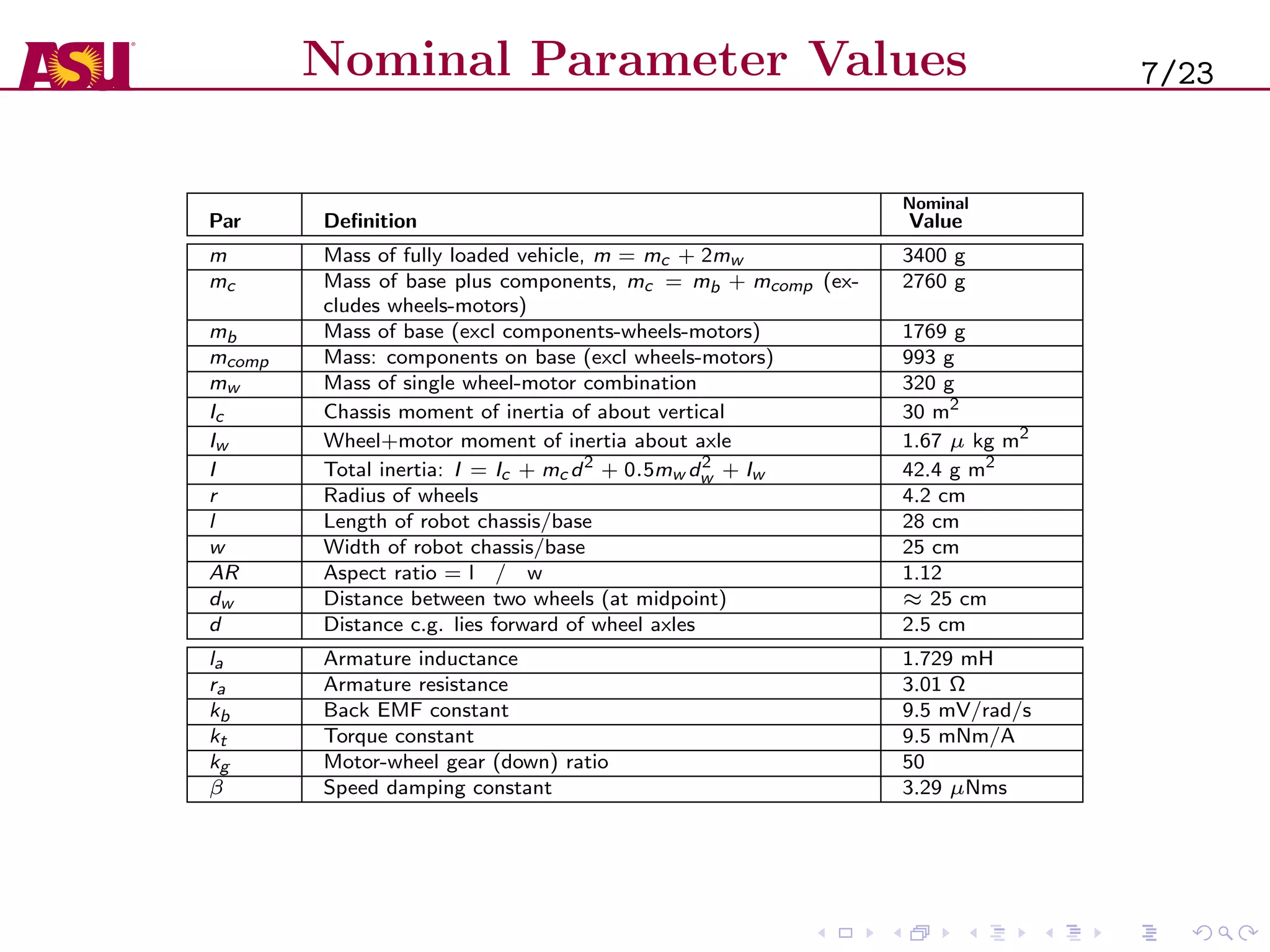
The document presents a final project on controlling nonholonomic robots in a platoon formation using quintic Bezier splines, focusing on algorithm development and hardware implementation. Key contributions include the creation of a minimum jerk trajectory planner and the application of the Kanayama nonlinear controller for real-time trajectory tracking. The work highlights advantages such as improved fuel efficiency and reduced collisions, alongside challenges related to string stability and potential security issues in inter-vehicular communication.
![Inner Loop Control Design
Assuming the plant P[e→ωr,l ] to be decoupled,
Kinner = kI2×2
where k = g(s+z)
s
b
s+b , g = 5, z = 10, b = 200.
Figure: Inner-Loop System
Figure: Sensitivities So = Si , To = Ti for Coupled P[e→[v,ω]]
9/23](https://image.slidesharecdn.com/driver-200525105712/75/Platoon-Control-of-Nonholonomic-Robots-using-Quintic-Bezier-Splines-9-2048.jpg)
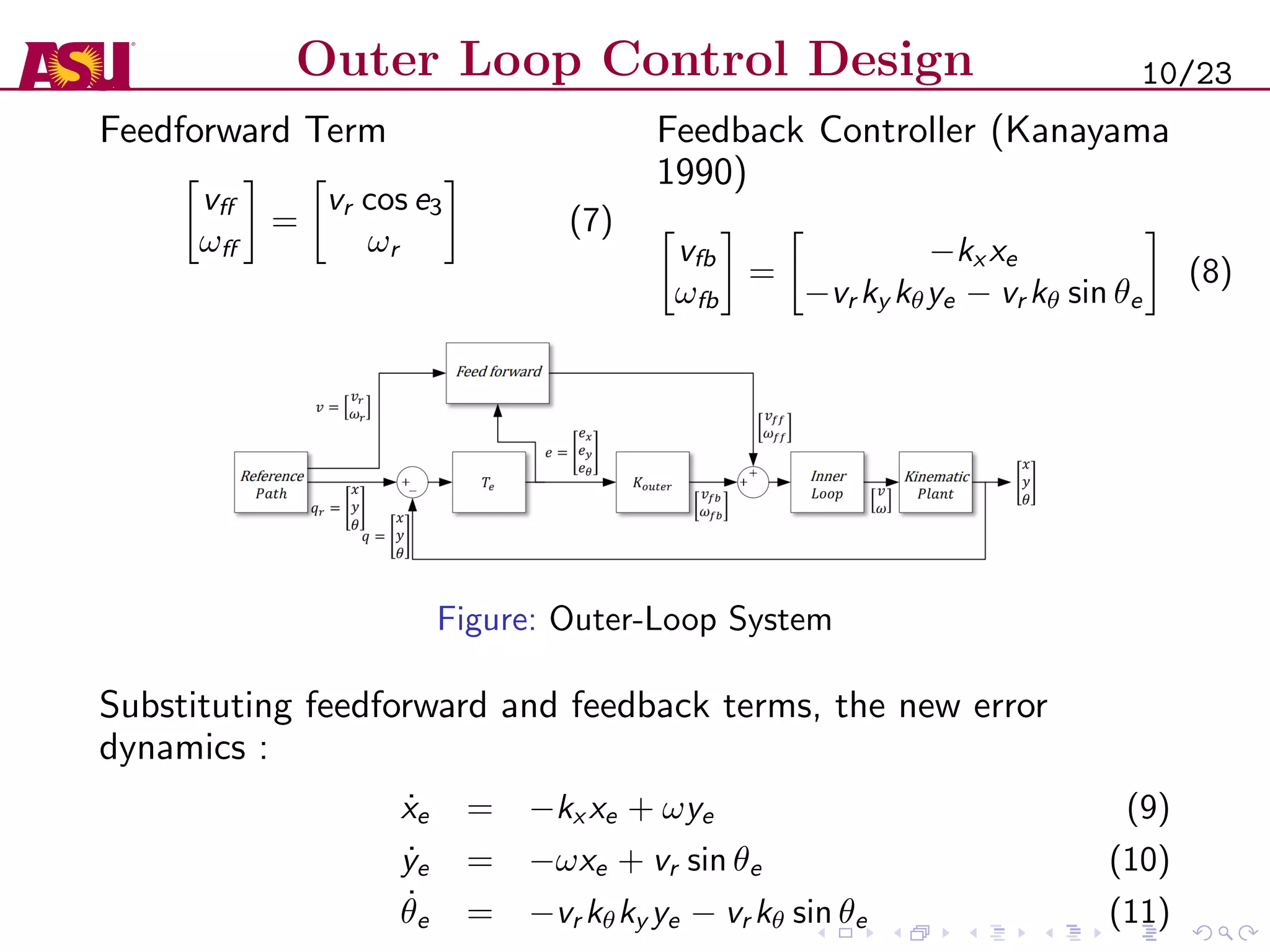
![Outer Loop Control Design
Linearized error dynamics near qe = [ xe ye θe ]T = 0:
˙qe = Aqe A =
−kx ωr 0
−ωr 0 vr
0 −vr kθky −vr kθ
(12)
Φ(s) = det(sI − A) = s3 + a2s2 + a1s + ao where
a2 = kx + vr kθ,
a1 = v2
r ky kθ + vr kx kθ + ω2
r ,
ao = vr ω2
r kθ + v2
r kx ky kθ.
A is hurwitz if a2a1 > ao.
vr > 0, kx , ky , kθ > 0 (Assumption)
kx = 0.75, ky = 4, kth = 4.5 (Hardware Implementation)
If ˙vr and ˙ωr are sufficiently small (Low, 2012), the equilibrium
qe = 0 is locally exponentially stable. Lyapunov analysis and
Barlabat’s Lemma have been used.
11/23](https://image.slidesharecdn.com/driver-200525105712/75/Platoon-Control-of-Nonholonomic-Robots-using-Quintic-Bezier-Splines-11-2048.jpg)
![Minimum Jerk Trajectory Generation
x∗
(t) = argmin
x(t)
T
0
L(
...
x , ¨x, ˙x, x, t)dt = argmin
x(t)
T
0
...
x (t)dt (13)
We solve the Euler Lagrange Equation:
∂L
∂x
−
d
dt
(
∂L
∂ ˙x
) +
d2
dt2
(
∂L
∂¨x
) −
d3
dt3
(
∂L
∂x(3)
) = 0 (14)
x(t) =
∞
n=0
αntn
(15)
x∗(t) = α0 + α1t + α2t2 + α3t3 + α4t4 + α5t5
6 coefficients, 6 tunable parameters, 6 boundary conditions
Initial Condition [xi , ˙xi , ¨xi ], Final Condition [xf , ˙xf , ¨xf ]
α0 = xi , α1 = ˙xi , α2 = 1
2 ¨xi
T3
T4
T5
3T2
4T3
5T4
6T 12T2
20T3
×
α3
α4
α5
=
xf − (xi + ˙xi T + 1
2
¨xT2
)
˙xf − ( ˙xi + ¨xi T)
¨xf − ¨xi
(16)
12/23](https://image.slidesharecdn.com/driver-200525105712/75/Platoon-Control-of-Nonholonomic-Robots-using-Quintic-Bezier-Splines-12-2048.jpg)
![Generation of Trajectories
Generation of 1D trajectories for s(arc length) and d(deviation).
argmin
s(t)
Cs (t)
s.t. t ∈ [t1, t2],
where
Cs (t) = k1
t2
t1
...
s (t)dt + k2t2 +
k3(sref (t2) − s(t2))2
t1 = t0
t2 = t0 + T
Jerk optimal trajectory from
[si , ˙si , ¨si , t1] → [starget , ˙starget , ¨starget , t2]
argmin
d(t)
Cd (t)
s.t. t ∈ [t1, t2],
where
Cd (t) = k4
t0+T
t0
...
d (t)dt +
k5t2 + k6(dref (t2) − d(t2))2
t1 = t0
t2 = t0 + T
Jerk optimal trajectory from
[di , ˙di , ¨di , t1] → [dtarget , 0, 0, t2]
Neglecting trajectories which intersect with obstacles, we select the
trajectory with the minimum Cs(t) + Cd (t).
14/23](https://image.slidesharecdn.com/driver-200525105712/75/Platoon-Control-of-Nonholonomic-Robots-using-Quintic-Bezier-Splines-14-2048.jpg)
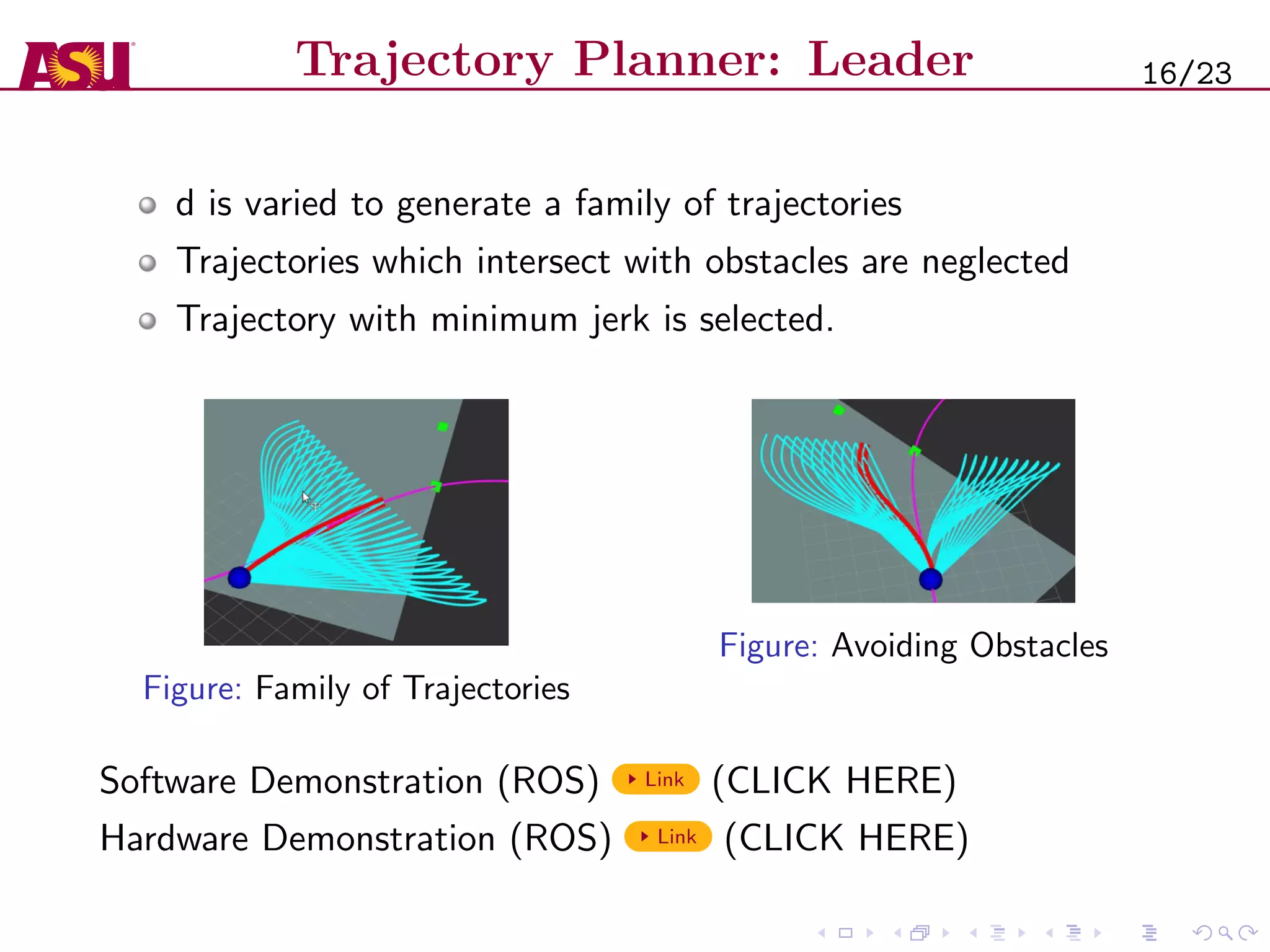
![Trajectory Planner: Leader
Trajectory Planner for Leader
Velocity keeping trajectory planner.
[s0, ˙s0, ¨s0, t1] → [ ˙starget , ¨starget , t2]
[d0, ˙d0, ¨d0, t1] → [d, 0, 0, t2] where dtarget − < d < dtarget +
Minimize the cost functional
argmin
s(t)
k1
t2
t1
...
s (t)dt + k2t2 + k3( ˙starget (t2) − ˙s(t2))2
s.t. t ∈ [t1, t2],
argmin
d(t)
k4
t2
t1
...
d (t)dt + k4t2 + k6(dtarget (t2) − d(t2))2
s.t. t ∈ [t1, t2],
s∗(t) = 4
n=0 αntn (Quartic Polynomial)
d∗(t) = 5
n=0 αntn (Quintic Polynomial)
Target point is tracked by leader using Kanayama nonlinear
controller(Kanayama 1990).
15/23](https://image.slidesharecdn.com/driver-200525105712/75/Platoon-Control-of-Nonholonomic-Robots-using-Quintic-Bezier-Splines-15-2048.jpg)
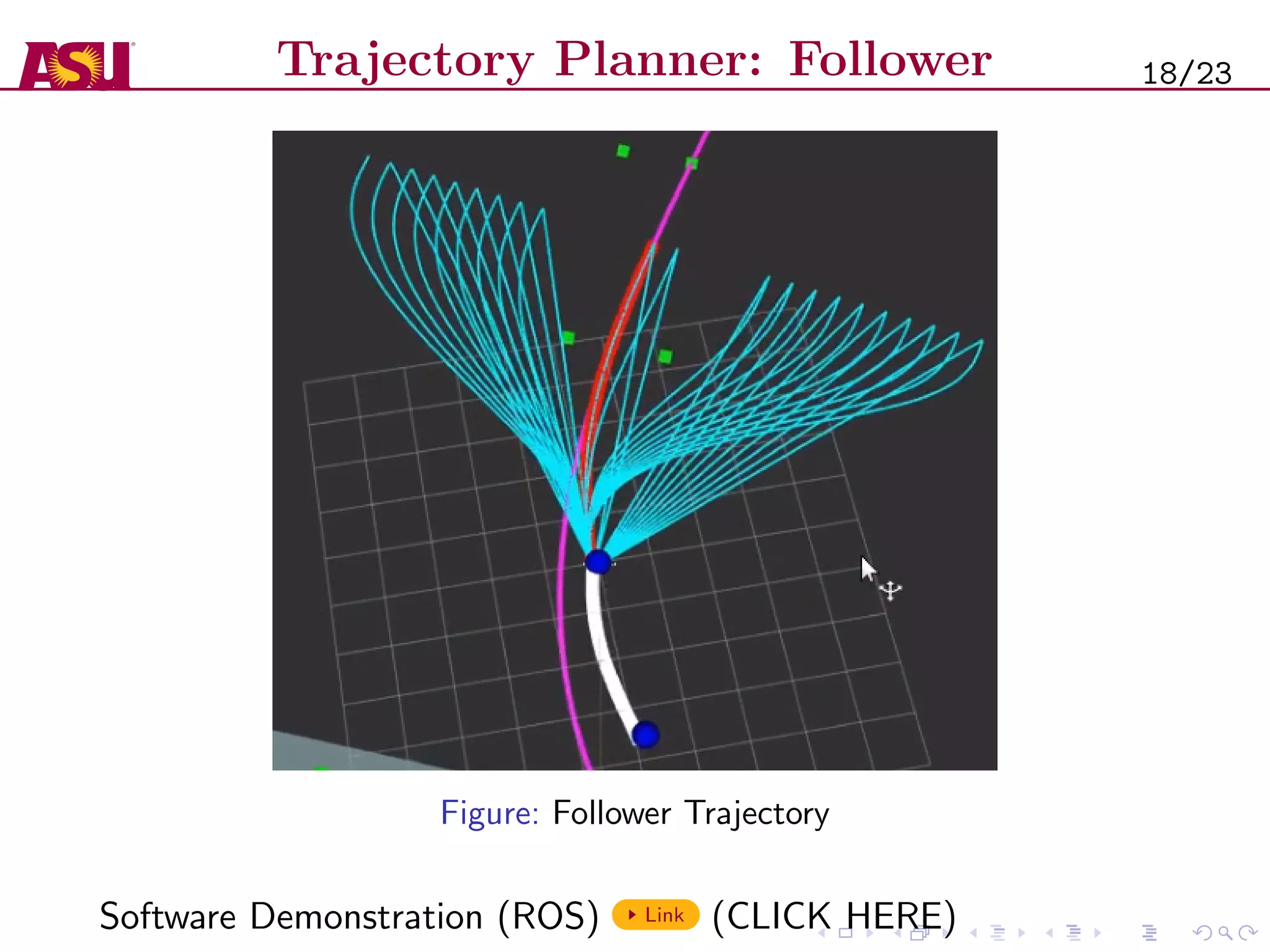
![Trajectory Planner: Follower
Trajectory Planner for follower
Use of Constant time-gap law for safety.
[starget, ˙starget, ¨starget, t1] → [slv , ˙slv , ¨slv , t2]
starget = slv − (D0 + τ ˙slv )
˙starget = ˙slv − τ ¨slv
¨starget = ¨slv
[slv , ˙slv , ¨slv , t2] represents position of Leader.
[starget, ˙starget, ¨starget, t1] represents desired position of Follower.
D0 is the standstill distance between robots
τ is the time-constant of the Constant time-gap law.
[dtarget, ˙dtarget, ¨dtarget, t1] → [dlv , 0, 0, t2]
dv is the perpendicular deviation from reference trajectory.
The target point is tracked by follower using Kanayama
Controller(Kanayama 1990).
17/23](https://image.slidesharecdn.com/driver-200525105712/75/Platoon-Control-of-Nonholonomic-Robots-using-Quintic-Bezier-Splines-17-2048.jpg)