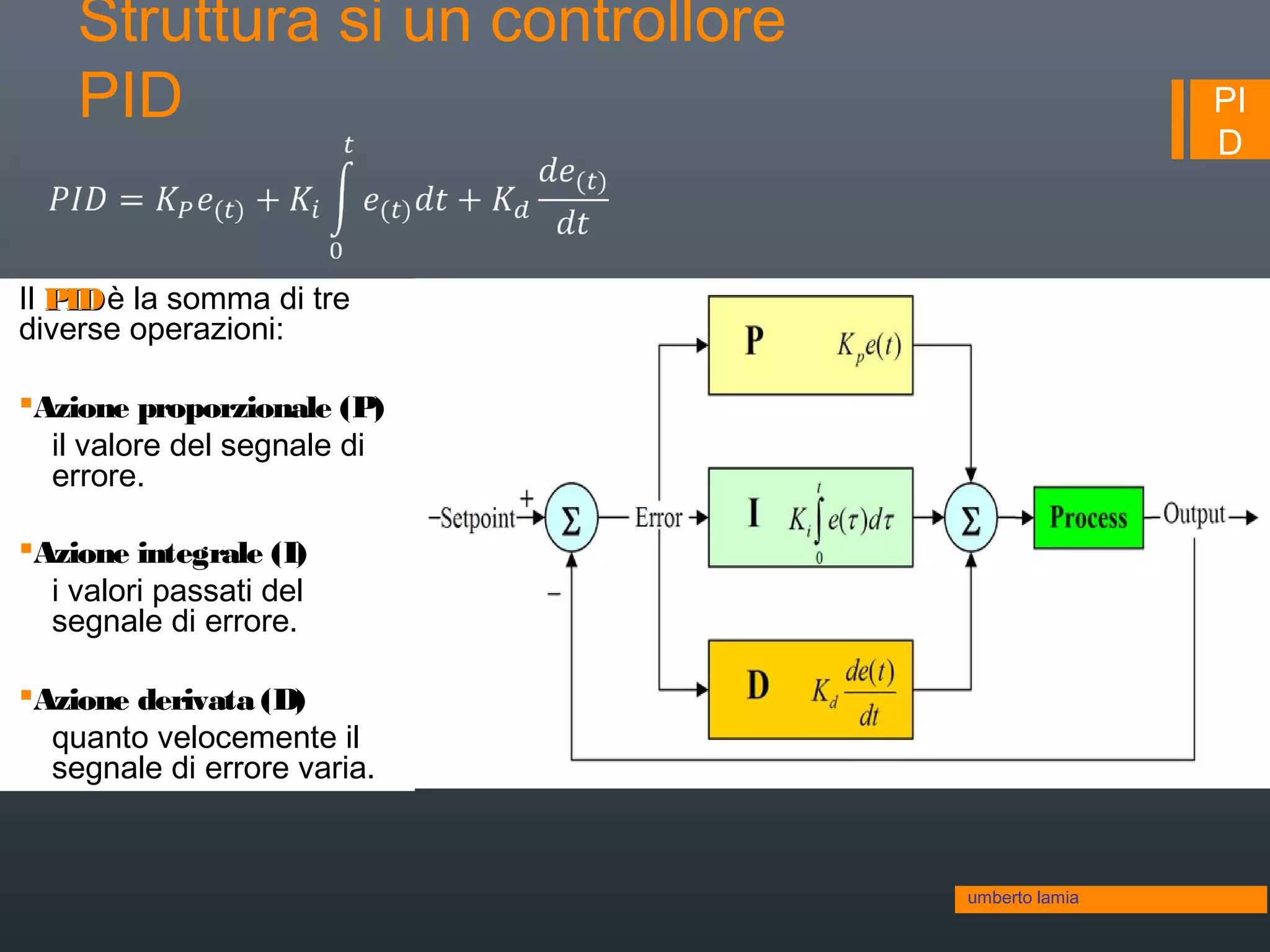
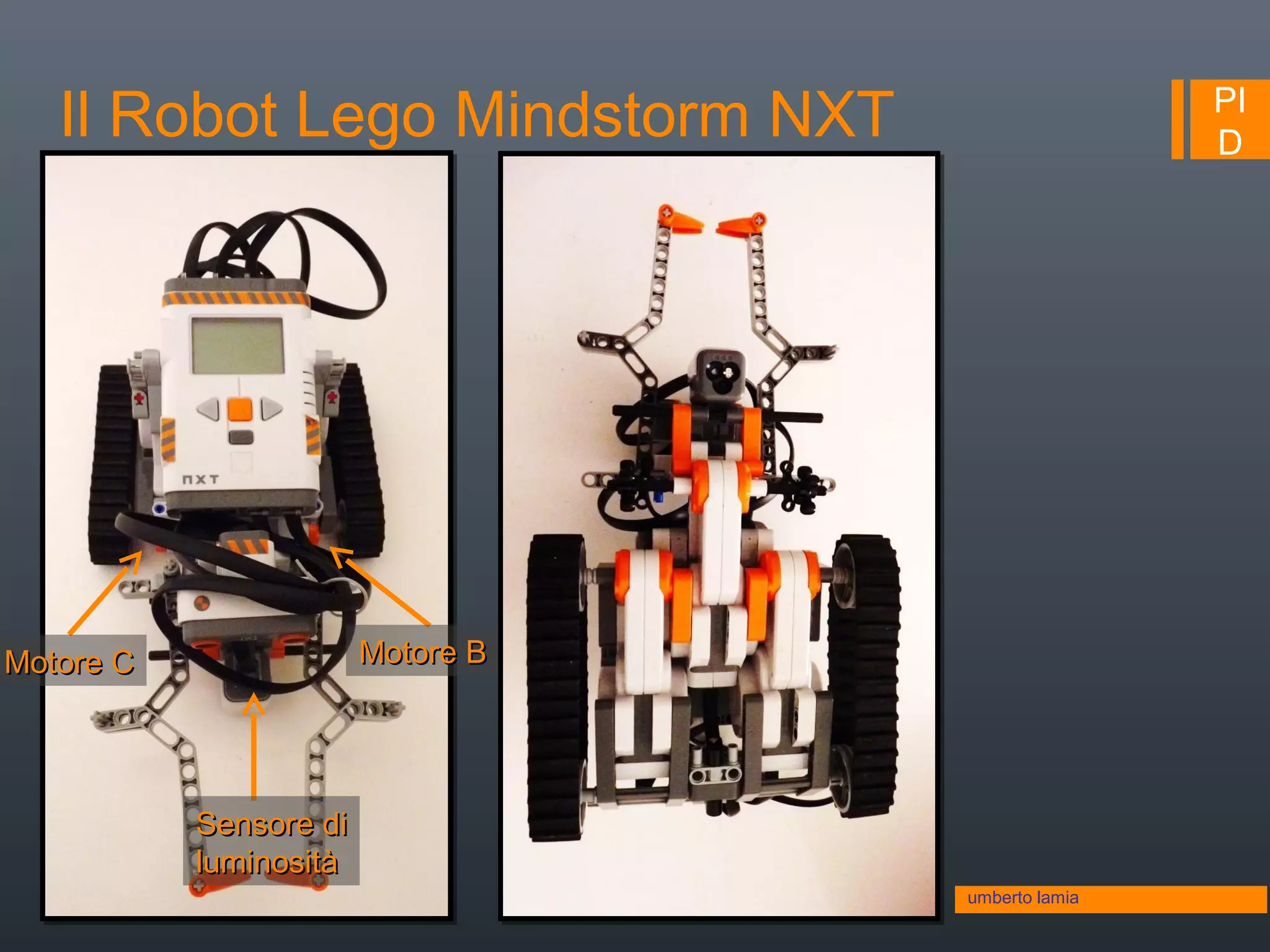
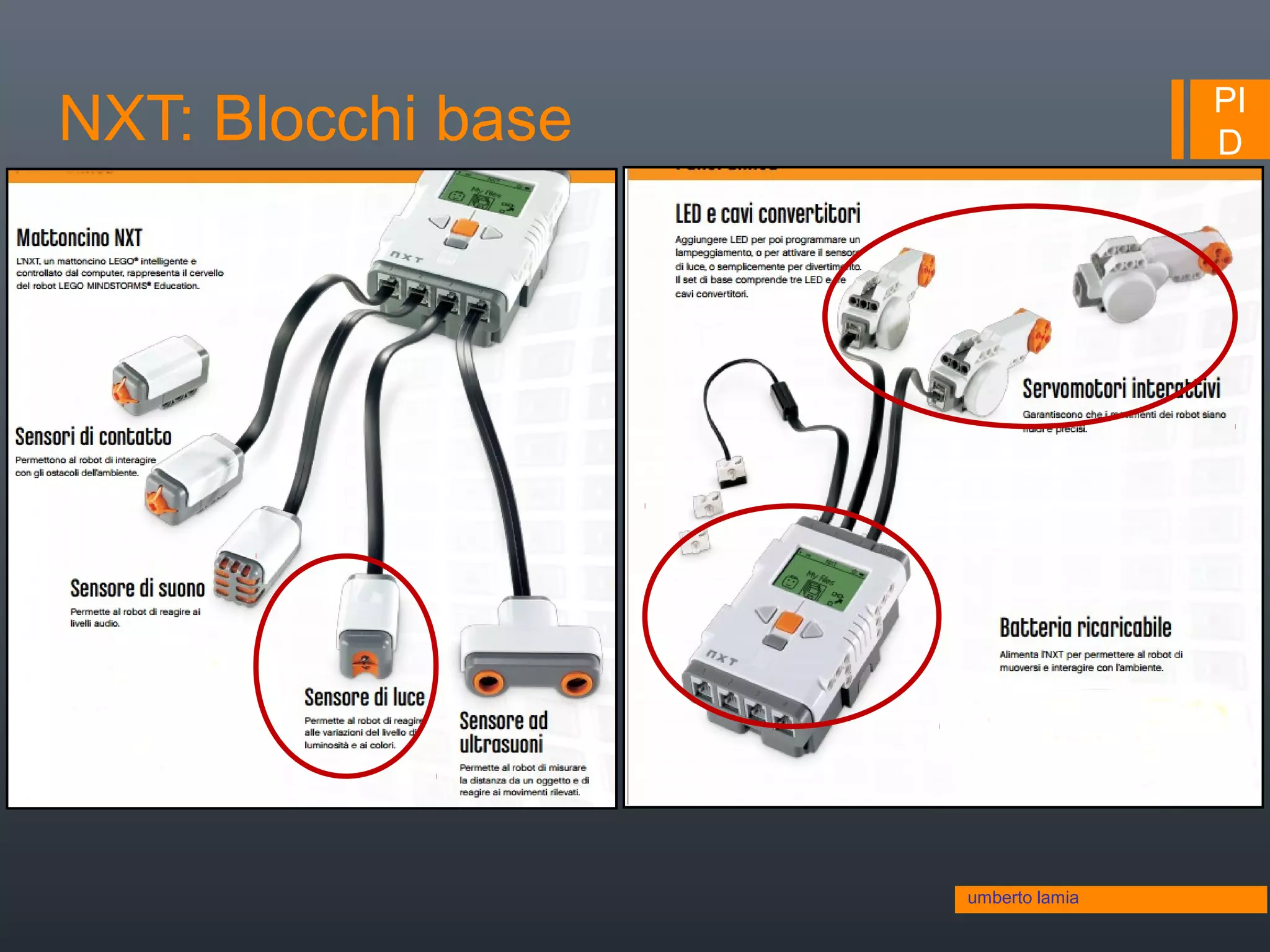
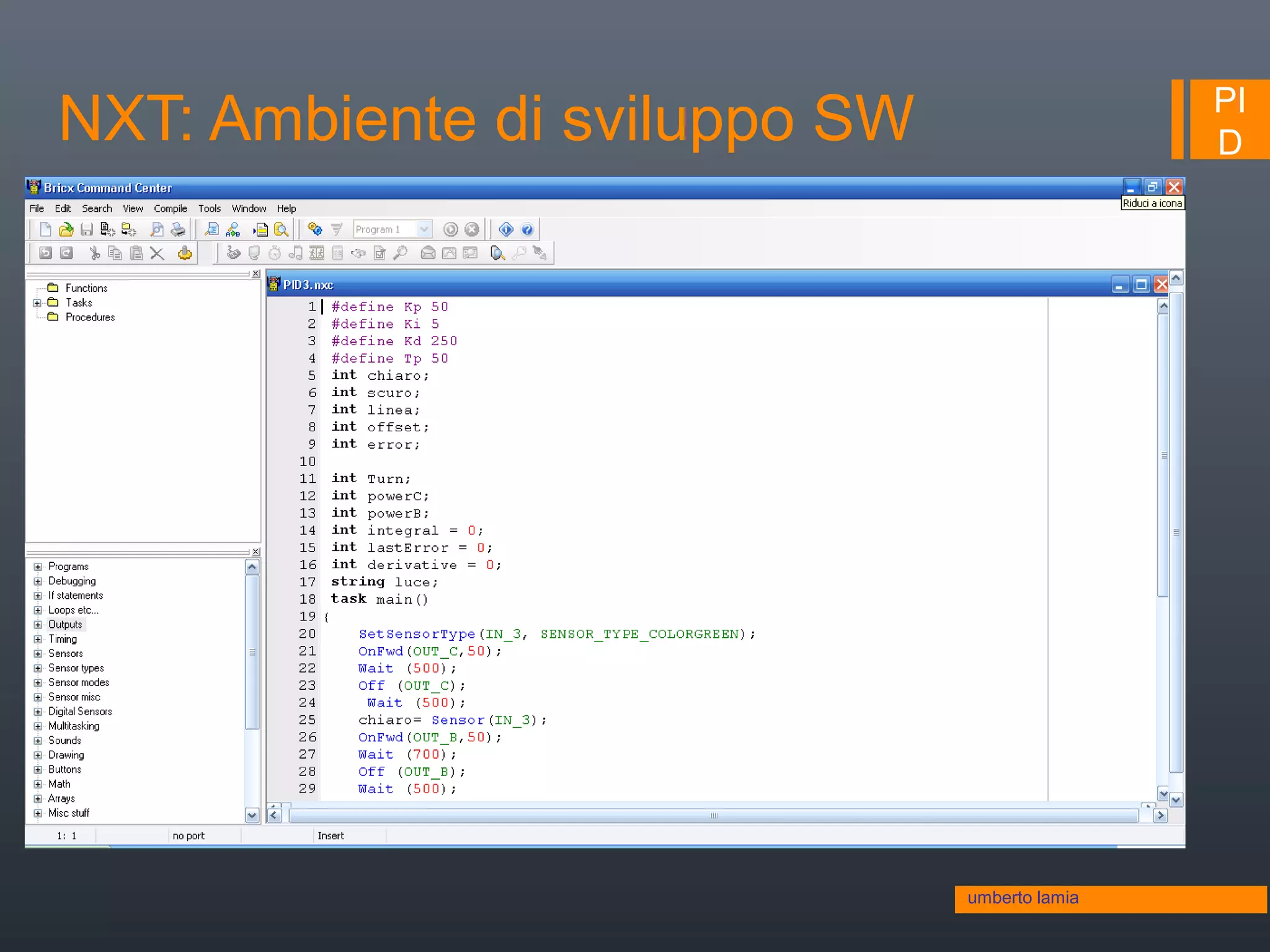
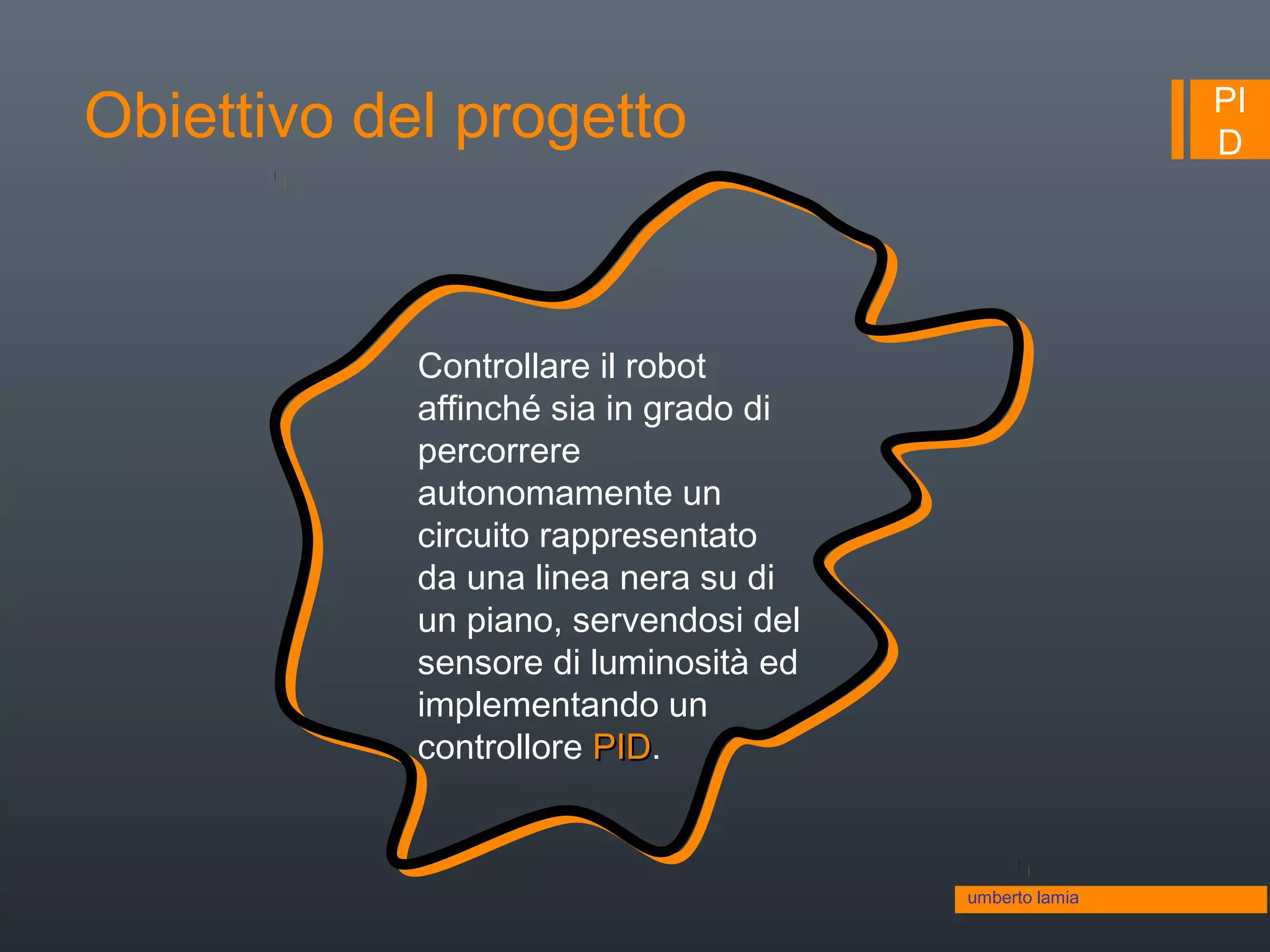
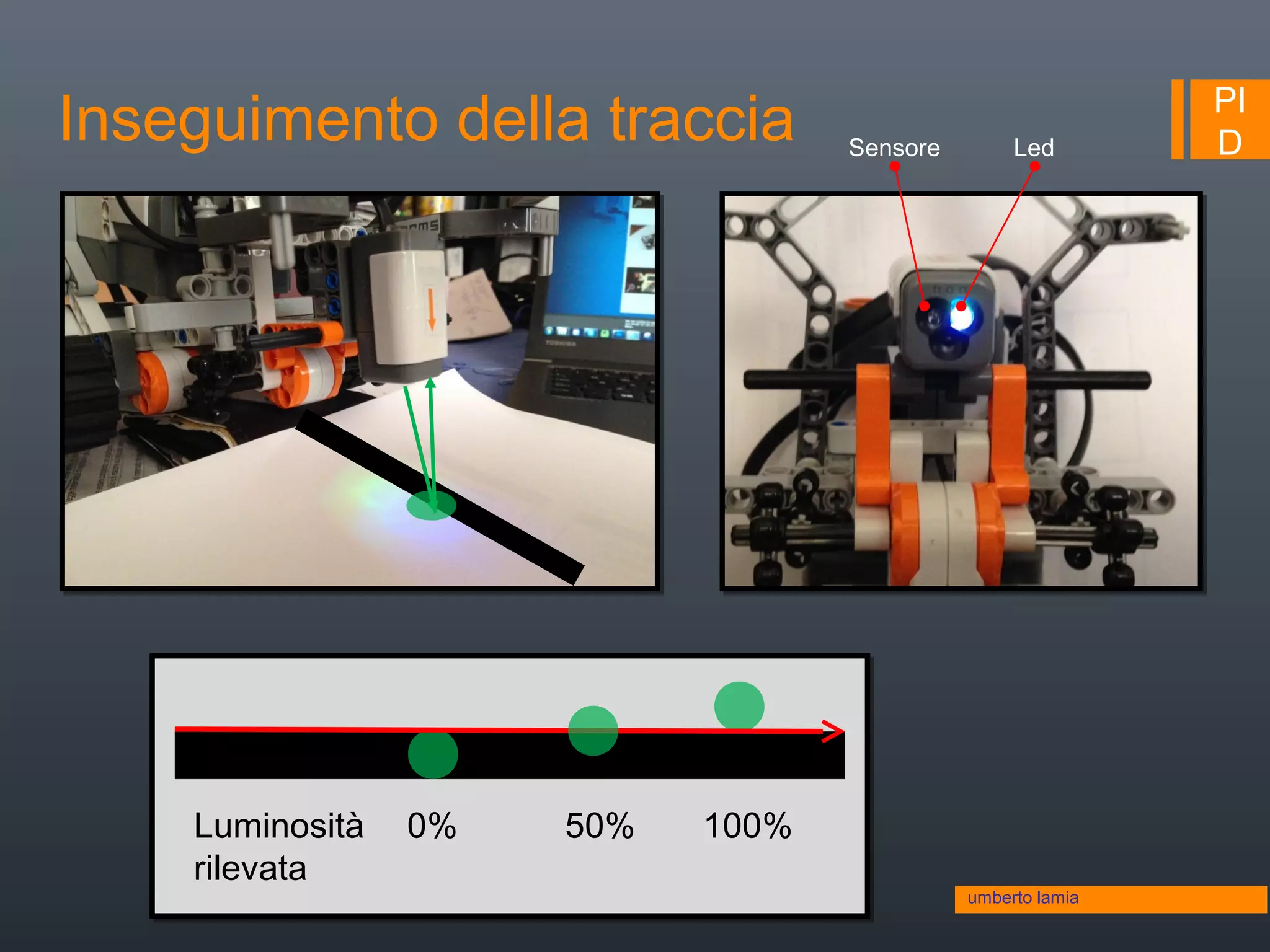
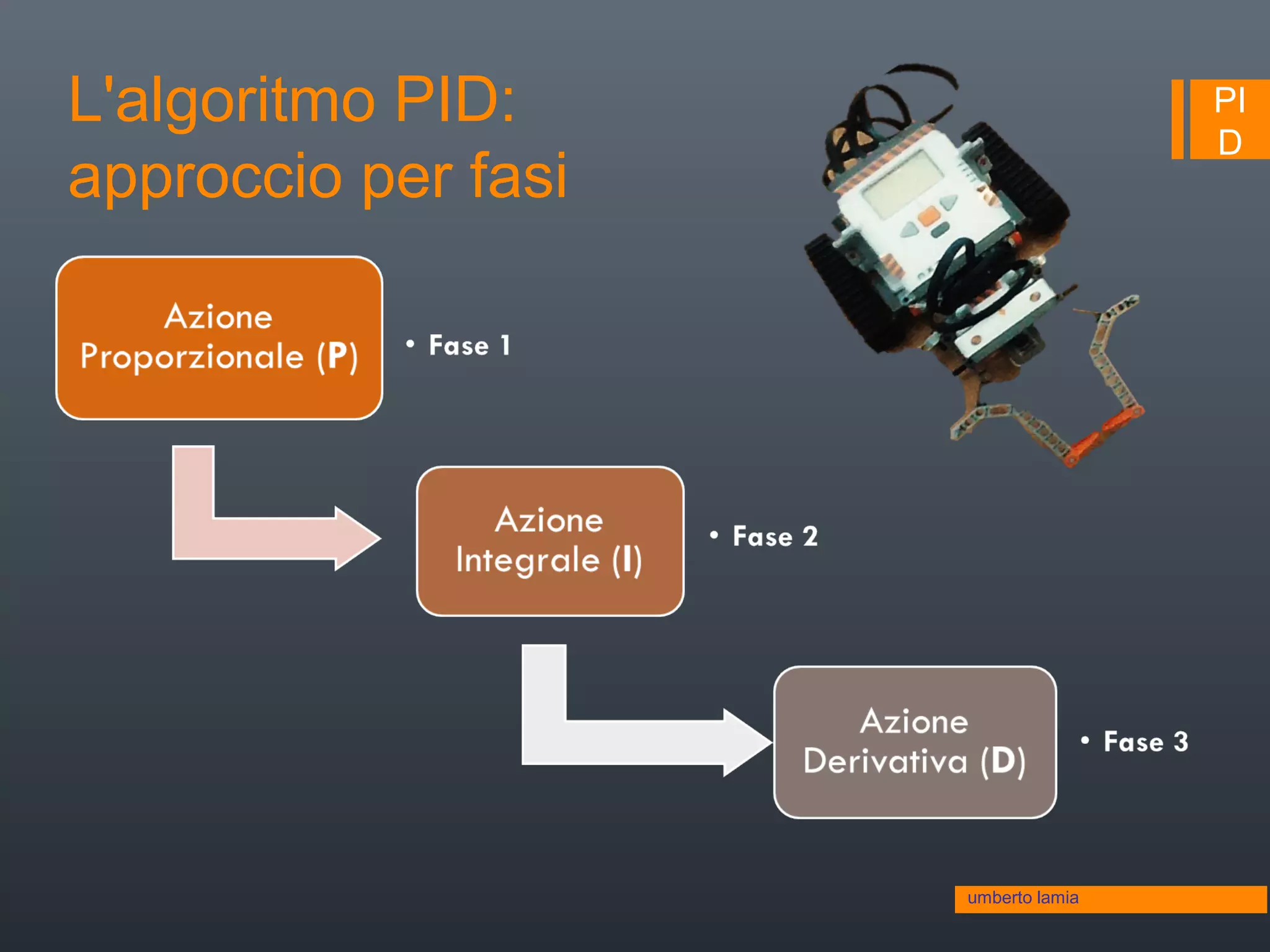
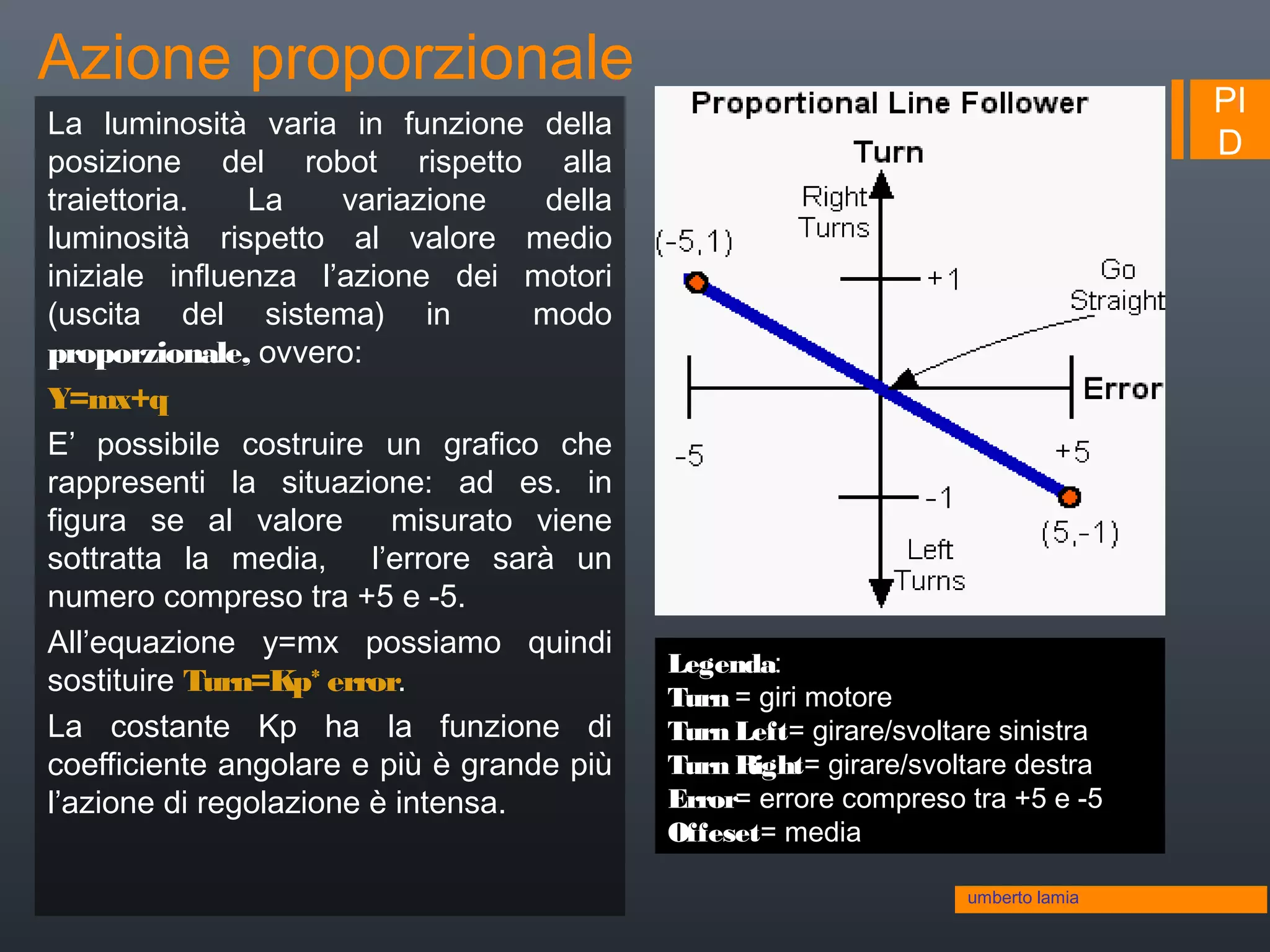
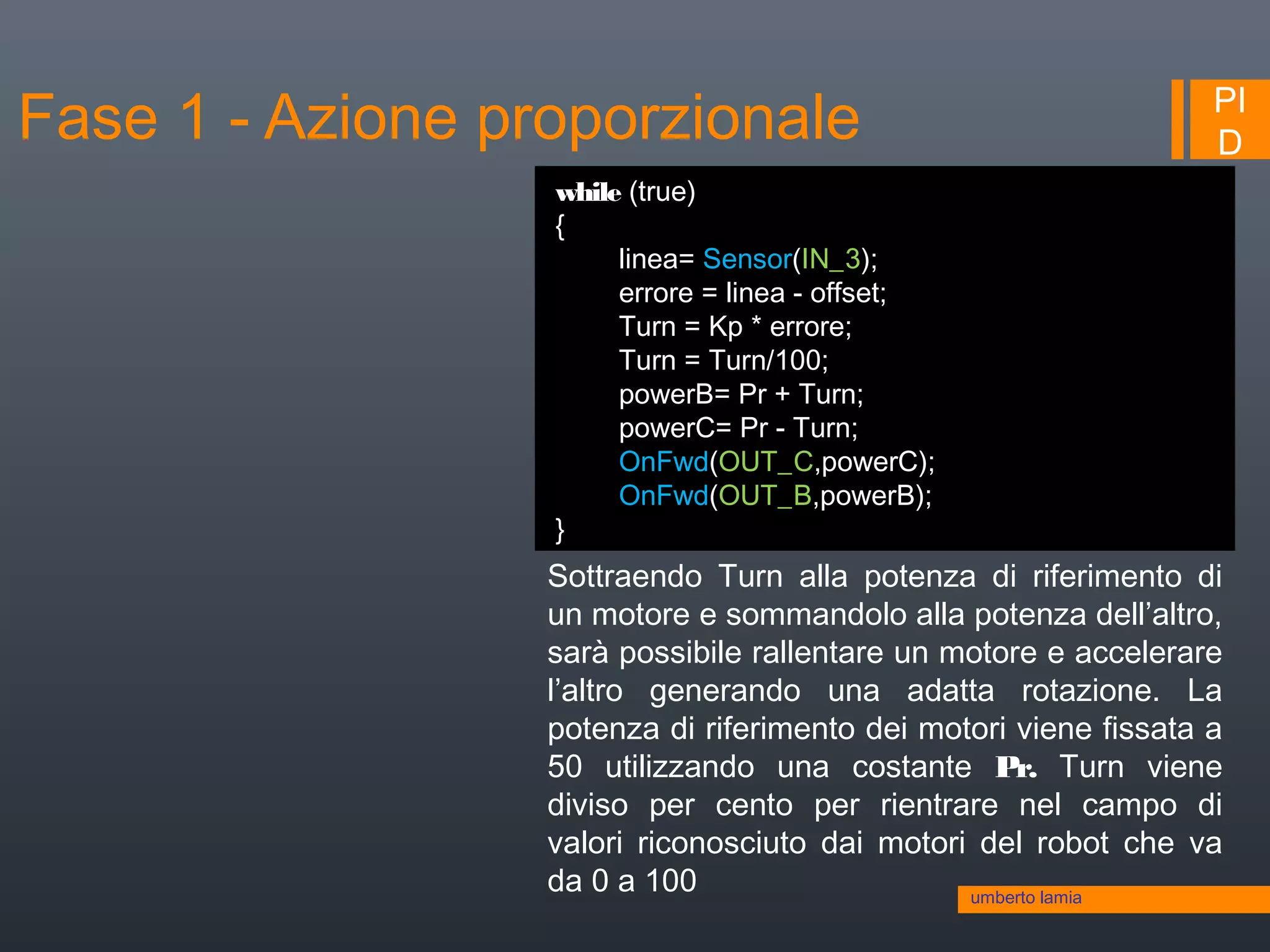
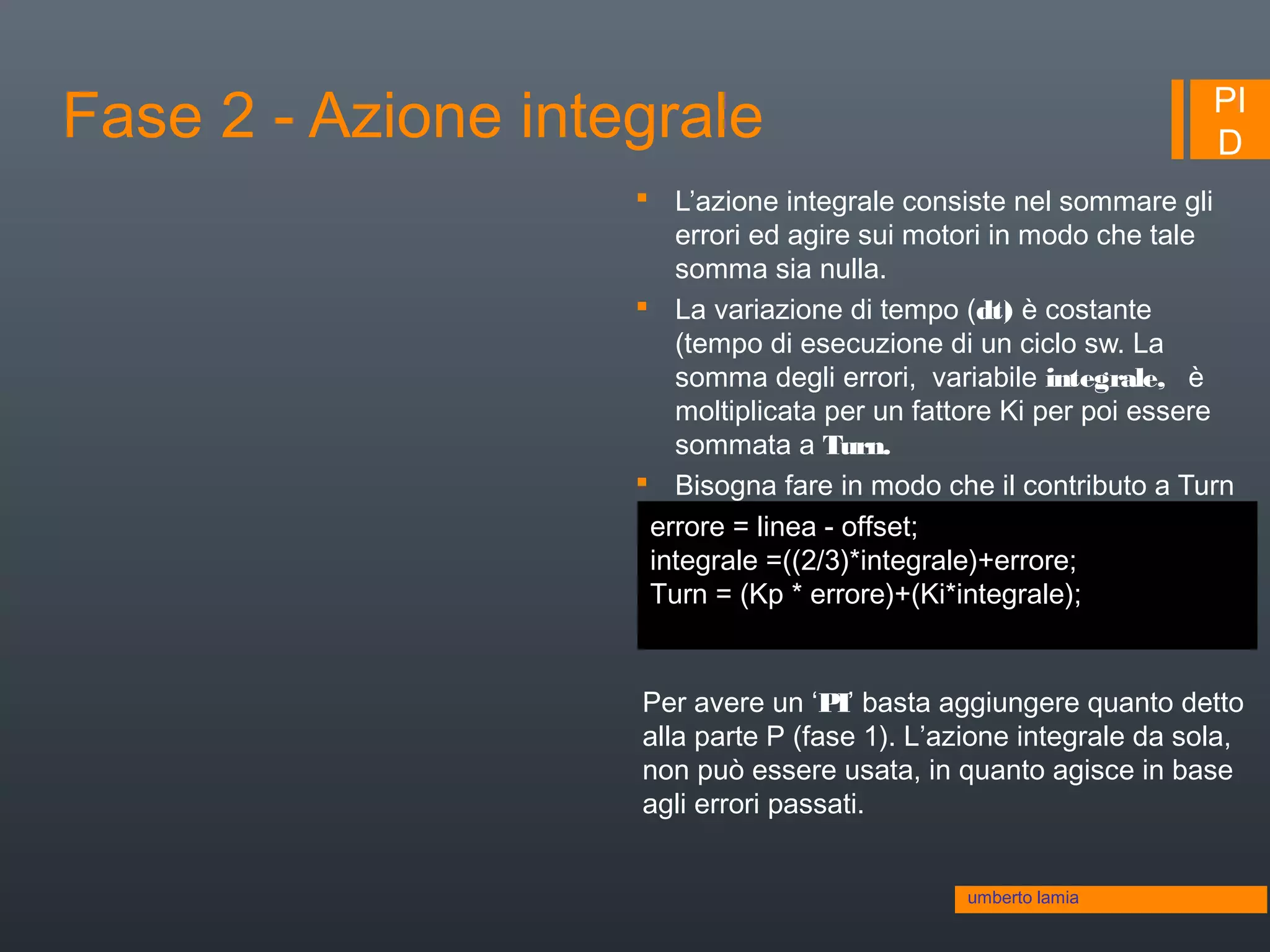
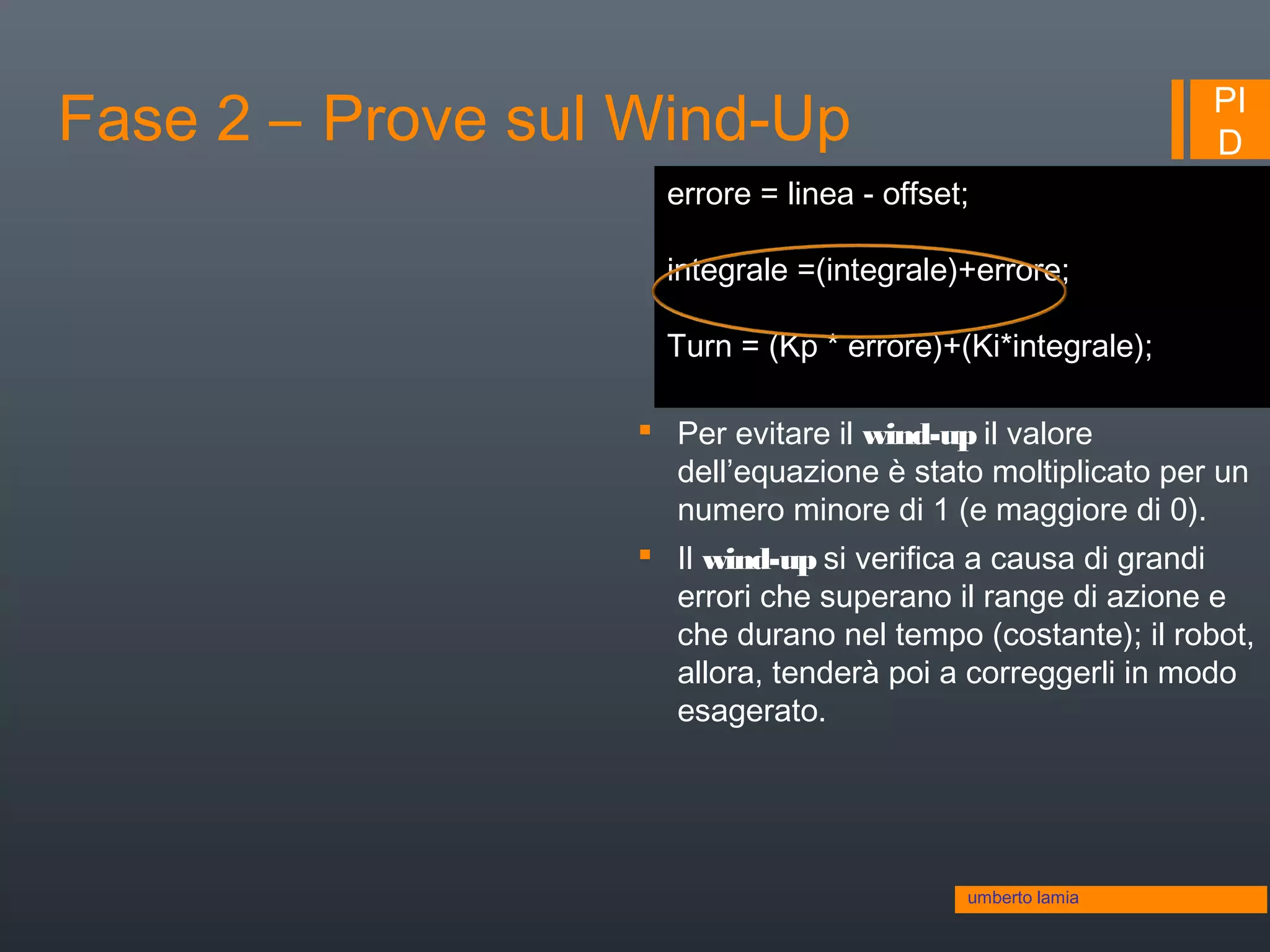
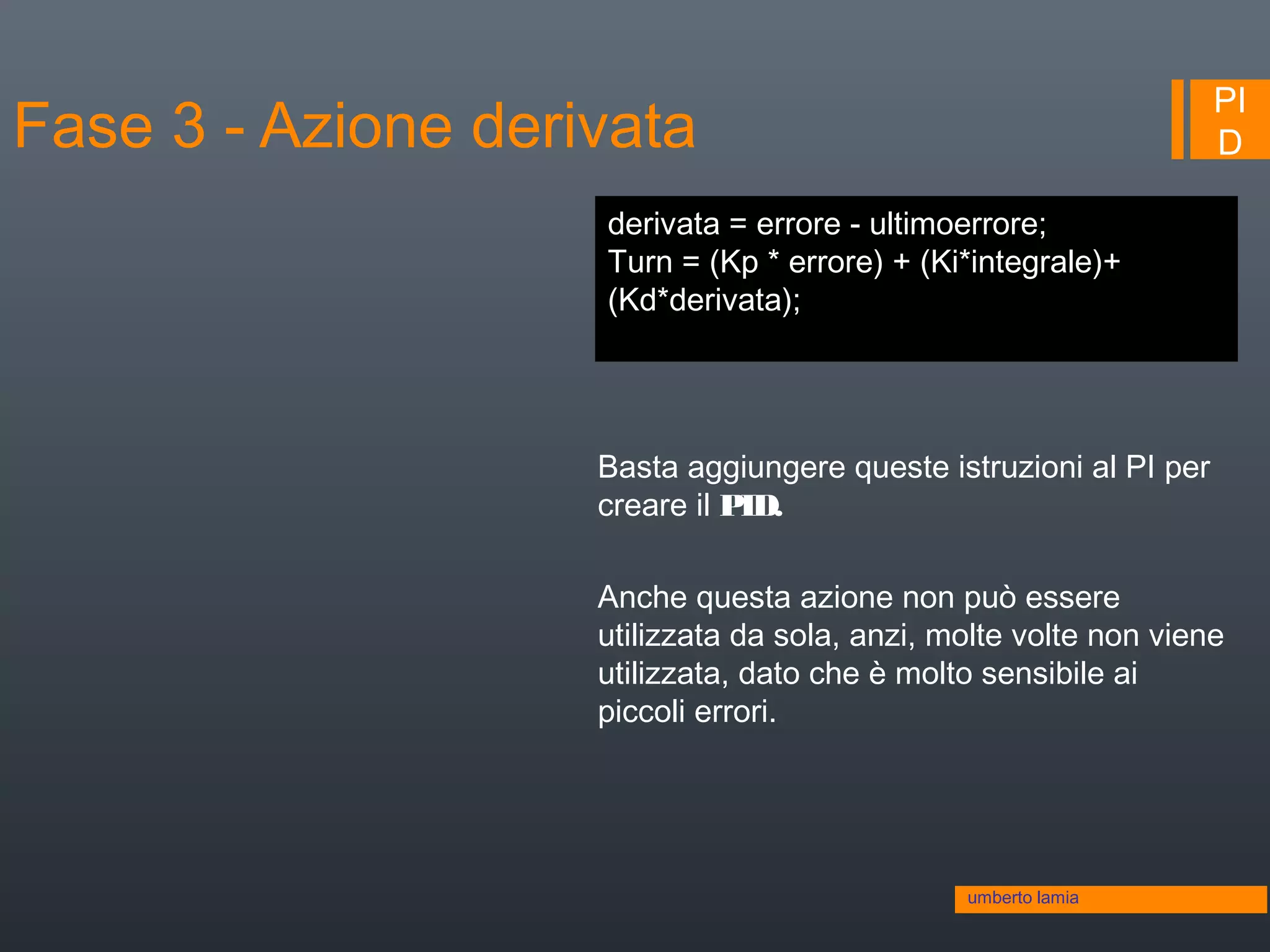
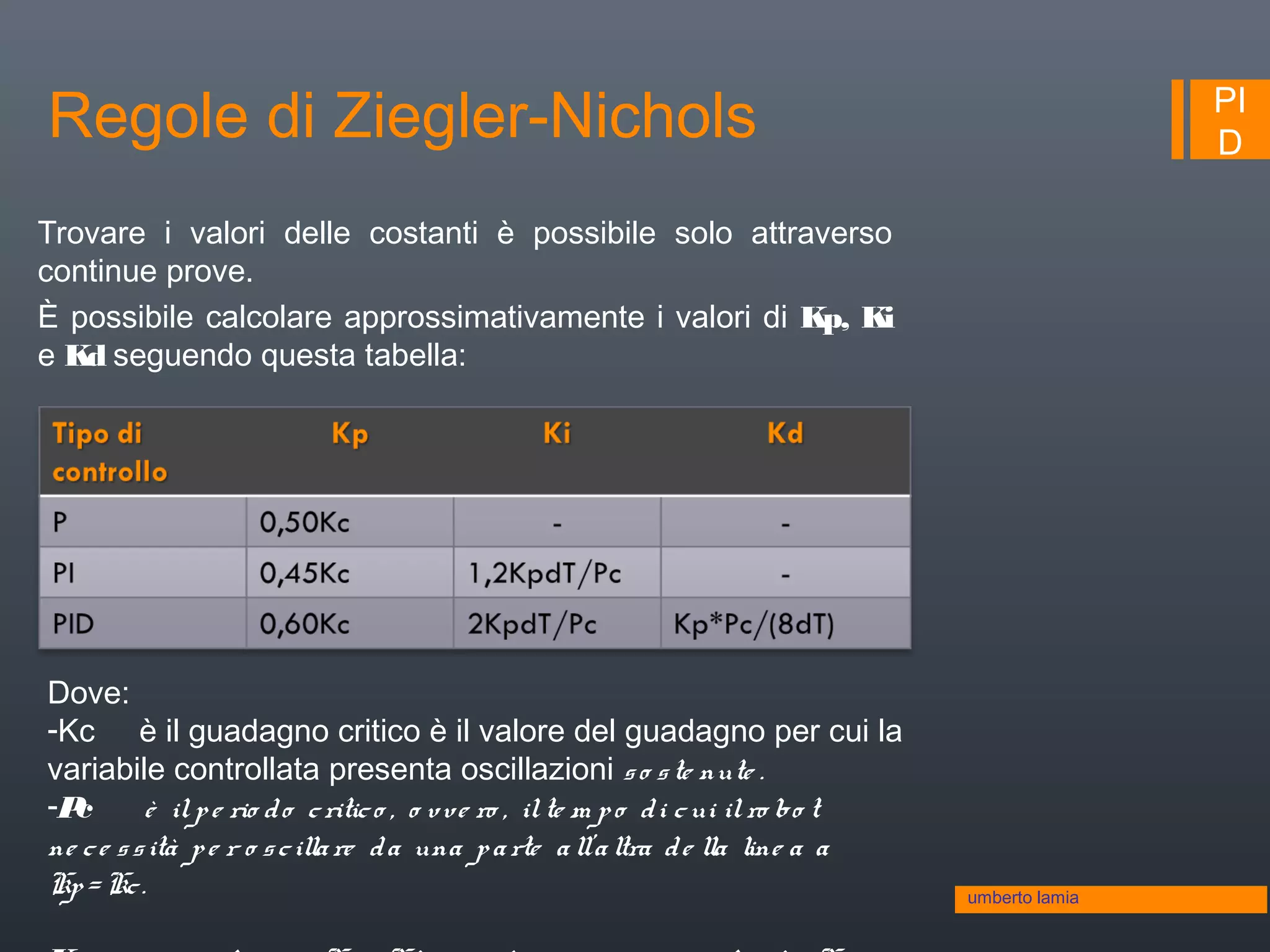
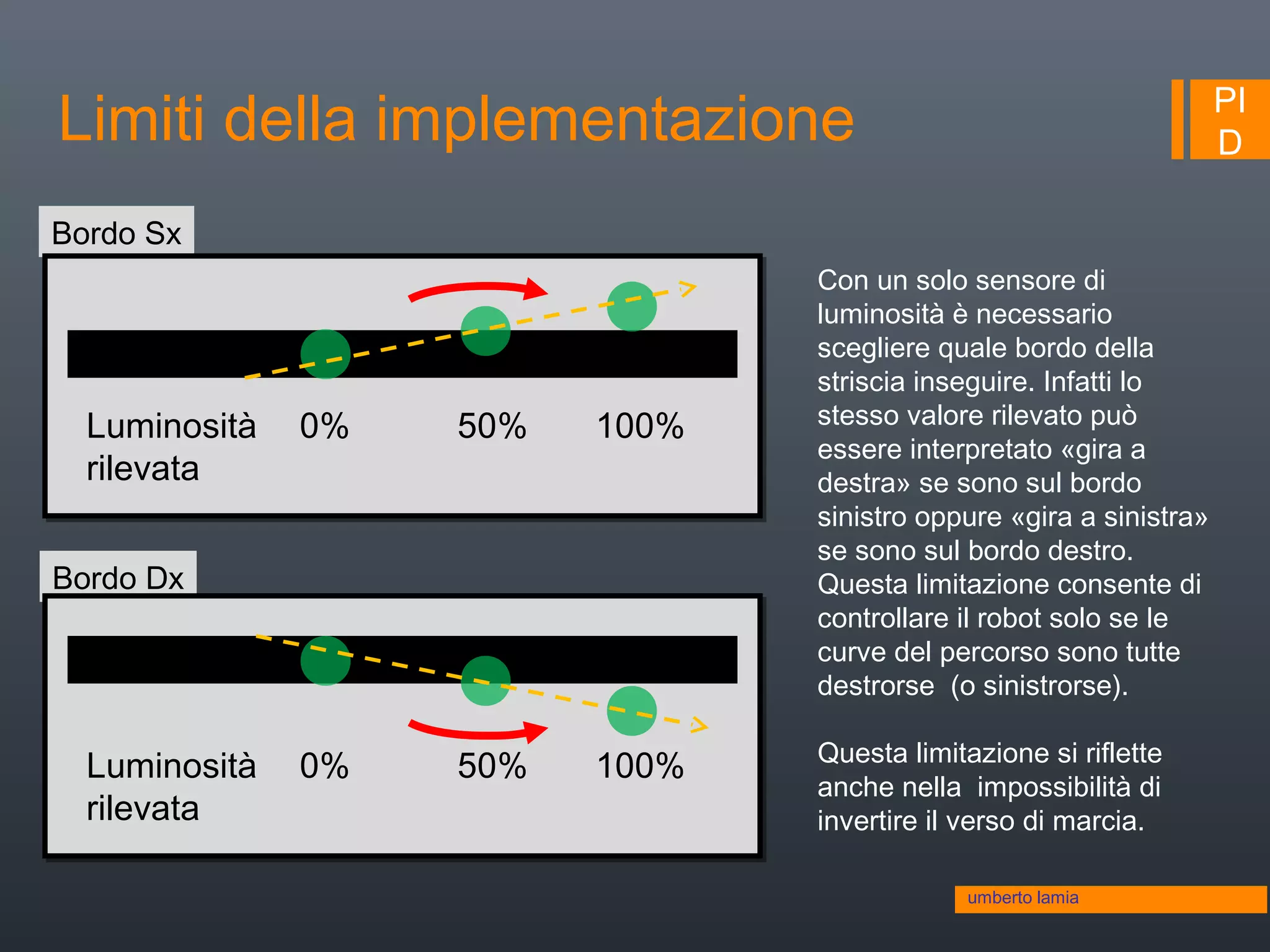
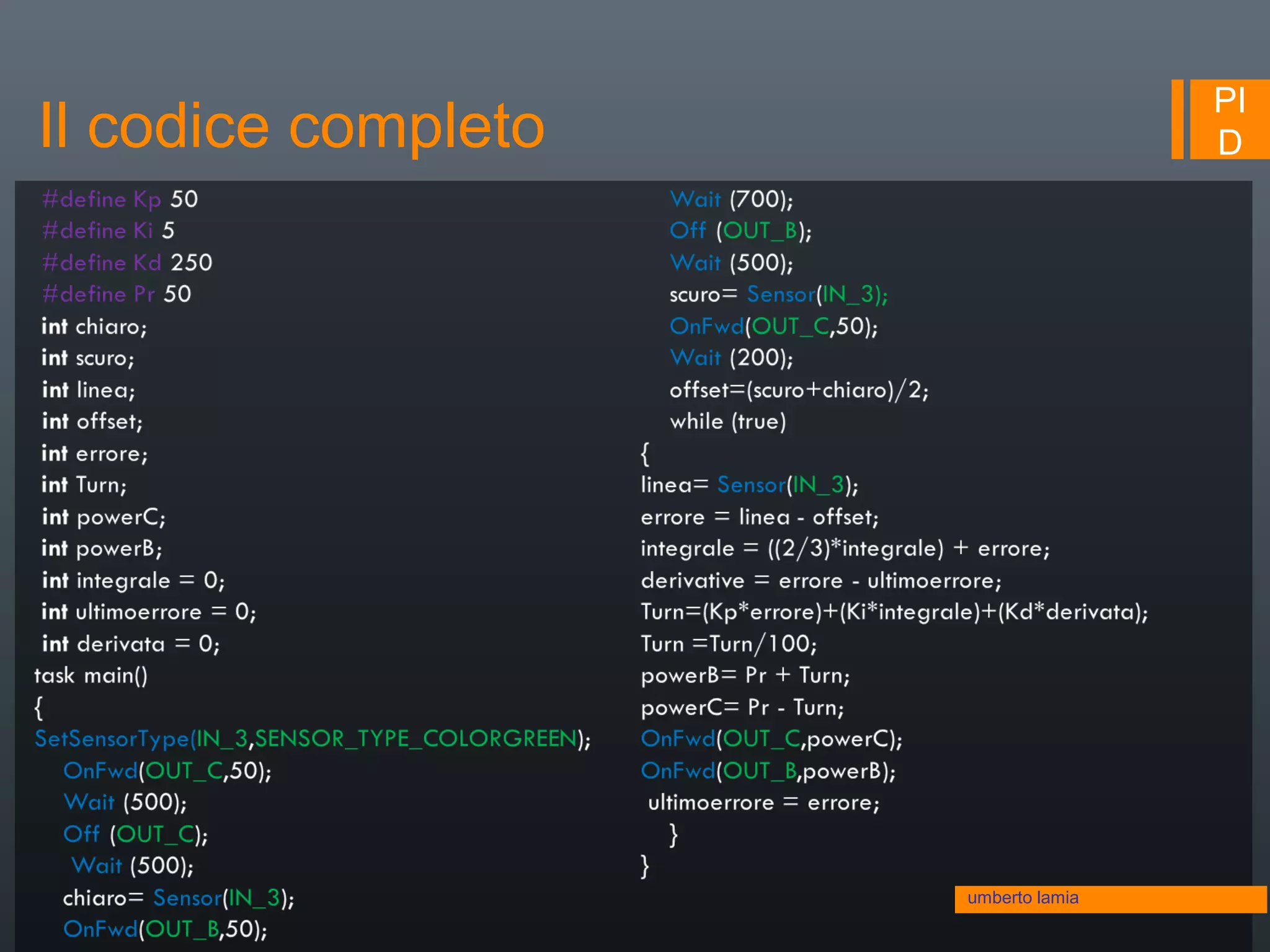
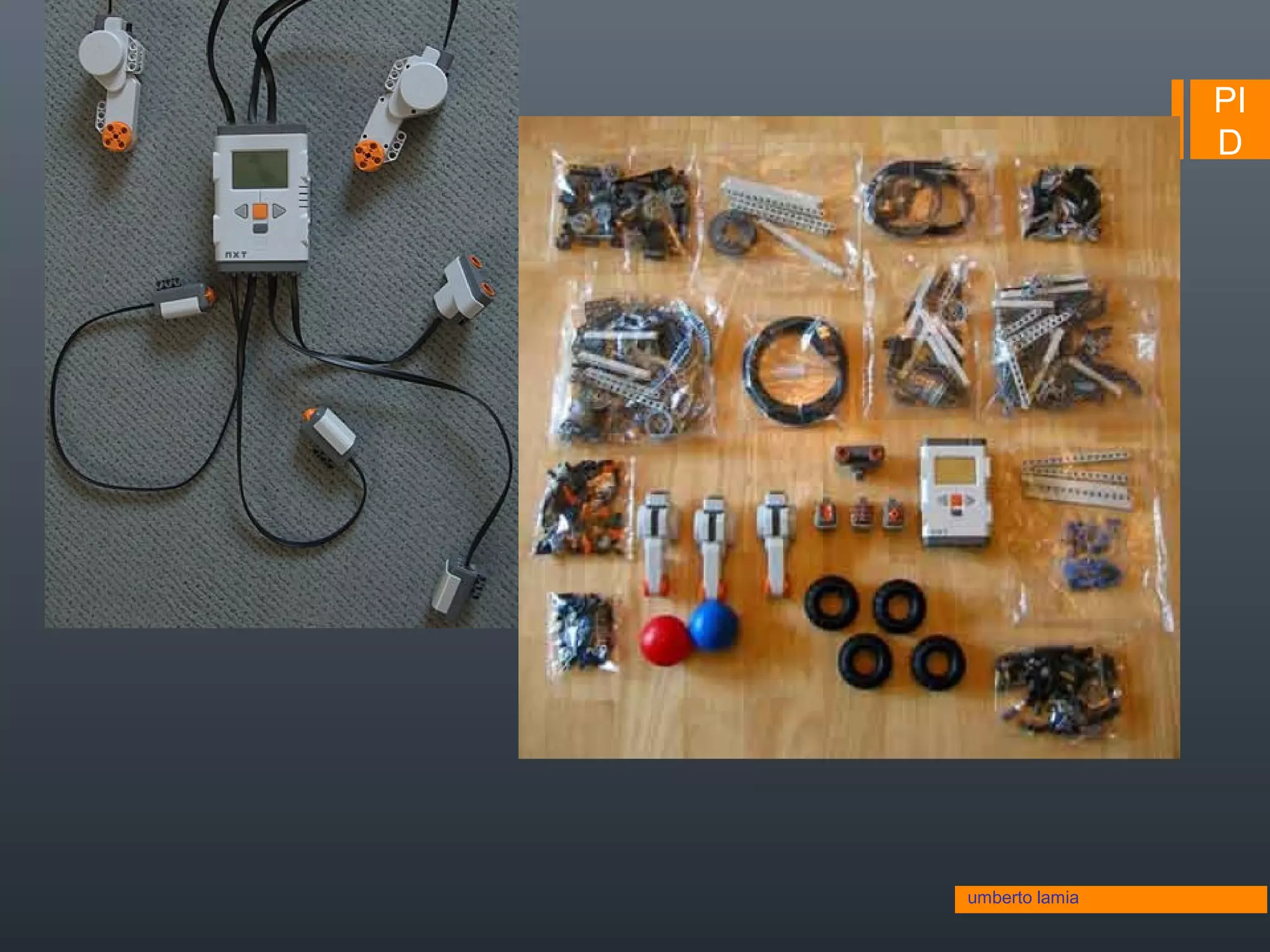
Il documento discute l'applicazione di un controllore PID per il controllo del movimento di un robot LEGO Mindstorms NXT, progettato per seguire una traiettoria su una linea nera. Viene descritta l'implementazione del controllore PID, includendo le fasi di azione proporzionale, integrale e derivata, e si confronta il comportamento del robot con un controllo on-off. Le criticità maggiori derivano dall'acquisizione e interpretazione dei dati di input, con suggerimenti per miglioramenti futuri come l'aggiunta di un secondo sensore di luminosità.