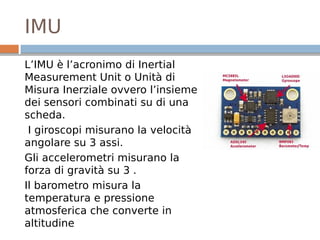
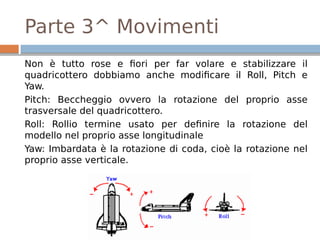
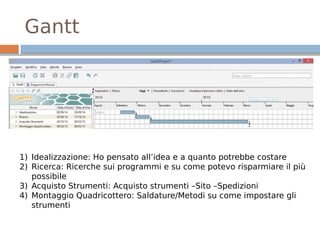
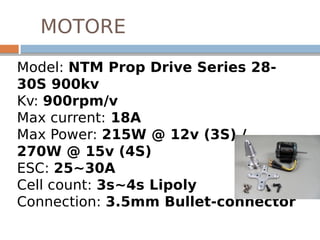
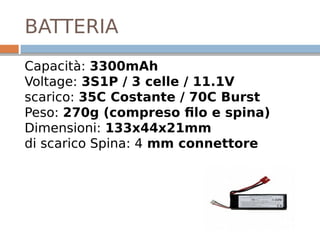
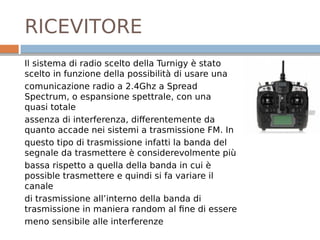
Il documento descrive il processo di programmazione e assemblaggio di un quadricottero utilizzando Arduino e il software MultiWii. Viene fornita una panoramica sui movimenti e la stabilizzazione tramite PID, oltre alle specifiche tecniche dei componenti utilizzati. Infine, si parla della configurazione del telecomando e delle modalità di comunicazione radio per controllare il drone.