Download to read offline
















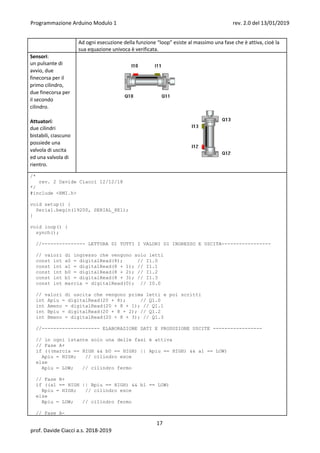







Il documento fornisce dettagli sulla programmazione di Arduino utilizzando il modulo 1 e la libreria hmi.h, permettendo la simulazione di vari progetti. Vengono incluse istruzioni per vari programmi, come lampeggiamenti di LED e controllo di attuatori tramite pulsanti, con esempi e codice commentato. Sono presentate anche funzioni di logica come AND e OR per il controllo simultaneo di dispositivi.



![Electronics LAB [with Arduino] | DAY 2](https://cdn.slidesharecdn.com/ss_thumbnails/flussi2013day2-130902112831-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)



















![Arduino ICT2016 [IT]](https://cdn.slidesharecdn.com/ss_thumbnails/arduinoparte2corsoict2016-170705144422-thumbnail.jpg?width=640&height=640&fit=bounds)












![Electronics LAB [with Arduino] | DAY 2](https://cdn.slidesharecdn.com/ss_thumbnails/flussi2013-day-2-130902113242-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)

![Electronics LAB [with Arduino] | DAY 3](https://cdn.slidesharecdn.com/ss_thumbnails/flussi2013day3-130902112652-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
![Electronics LAB [with Arduino] | DAY 3](https://cdn.slidesharecdn.com/ss_thumbnails/flussi2013-day-3-130902113242-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)