![Research article
PI controller design for indirect vector controlled induction motor:
A decoupling approach
Jitendra Kr. Jain a,n
, Sandip Ghosh b
, Somnath Maity a
, Pawel Dworak c
a
Department of Electrical Engineering, National Institute of Technology, Rourkela, Orissa 769008, India
b
Department of Electrical Engineering, Indian Institute of Technology (BHU), Varanasi 221005, India
c
Department of Control Engineering and Robotics, West Pomeranian University of Technology, Szczecin, Poland
a r t i c l e i n f o
Article history:
Received 23 August 2016
Received in revised form
3 April 2017
Accepted 25 May 2017
Available online 16 June 2017
Keywords:
Indirect vector controlled induction motor
Coupling
Iterative linear matrix inequality
H1 controller
Proportional-integral design
a b s t r a c t
Decoupling of the stator currents is important for smoother torque response of indirect vector controlled
induction motors. Typically, feedforward decoupling is used to take care of current coupling that requires
exact knowledge of motor parameters, additional circuitry and signal processing. In this paper, a method
is proposed to design the regulating proportional-integral gains that minimize coupling without any
requirement of the additional decoupler. The variation of the coupling terms for change in load torque is
considered as the performance measure. An iterative linear matrix inequality based ∞H control design
approach is used to obtain the controller gains. A comparison between the feedforward and the proposed
decoupling schemes is presented through simulation and experimental results. The results show that the
proposed scheme is simple yet effective even without additional block or burden on signal processing.
& 2017 ISA. Published by Elsevier Ltd. All rights reserved.
1. Introduction
Vector control in induction motor (IM) is used to make it behave
like a separately excited direct current (DC) motor. The vector
control of IM is realized in either of two ways: direct and indirect.
Because of its simplicity and high performance, indirect one is often
preferred over the direct one. To generate the instantaneous torque
using indirect vector control (IVC) scheme [1], two current com-
ponents (the direct and quadrature ones) are to be controlled in-
dependently. The available current-loop control schemes are based
on synchronous reference frame control (SRFC), stationary re-
ference control (SRC), and hysteresis control [2]. Although SRC is
simpler than the SRFC one, the latter one is preferred since it op-
erates on DC quantities and zero steady-state error. These benefits
can be achieved if the regulator gains are chosen efficiently [2]. For
such regulation, the reference quadrature current is given by the
outer speed-loop, which is realized by linear, intelligent control
techniques and nonlinear methods [3–8]. However, these compo-
nents are inherently coupled through the motor dynamics which
affects the IM torque response.
The coupled flux and torque dynamics behavior along with rotor
resistance variation effect have been studied in [9]. The severity of
this coupling on motoring operation depends on the control
application. During the low-speed IM operation, the coupling effect
can be neglected. Erstwhile, for high-speed operation, fast torque
response is difficult to achieve without proper decoupling [10]. For
overcoming the coupling effect, many decoupling techniques have
been discussed. A complex vector synchronous frame proportional-
integral (PI) controller design has been proposed in [11] to enhance
the performance of synchronous PI controller. Specifically, para-
meter variation causes errors in the estimated flux that may lead to
the reduction of the torque performance. To overcome this, a
modified decoupling control has been proposed in [12]. Additional
PI controller has been used to perform the decoupling in [13]. An
internal-model-control (IMC) based decoupling has also been re-
ported in [14], where additional integrator dynamics has been used
to minimize the coupling. Further, a dynamic controller structure
for the current controllers have been used in [10] to achieve de-
coupling. The rotor time-constant estimation based decoupling has
been suggested in [15]. A new adaptive observer based speed esti-
mation technique has been proposed in [16] that may be used for
decoupling. Multivariable PI based decoupling scheme has been
discussed in [17]. Here, similar to the IMC based decoupling [14],
inclusion of integrators have been used for mitigating the coupling.
Despite these modifications, the feedforward decoupling method
[18] is still preferred due to its straight-forwardness and faster de-
coupling ability.
Apart from the above linear decoupling schemes, a sliding
mode control based decoupling has been developed in [19,20].
Due to the lack of antiwindup capability in [19], the proposed
controller may saturate at high speed limiting its application to
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/isatrans
ISA Transactions
http://dx.doi.org/10.1016/j.isatra.2017.05.016
0019-0578/& 2017 ISA. Published by Elsevier Ltd. All rights reserved.
n
Corresponding author.
E-mail addresses: jitendra1610@gmail.com (J.Kr. Jain),
sghosh.eee@itbhu.ac.in (S. Ghosh), somnathm@nitrkl.ac.in (S. Maity),
pawel.dworak@zut.edu.pl (P. Dworak).
ISA Transactions 70 (2017) 378–388](https://image.slidesharecdn.com/pi-controller-design-for-indirect-vector-controlled-inductio2017isa-transa-180807171749/85/PI-controller-design-for-indirect-vector-controlled-induction-motor-1-320.jpg)
![Research article
PI controller design for indirect vector controlled induction motor:
A decoupling approach
Jitendra Kr. Jain a,n
, Sandip Ghosh b
, Somnath Maity a
, Pawel Dworak c
a
Department of Electrical Engineering, National Institute of Technology, Rourkela, Orissa 769008, India
b
Department of Electrical Engineering, Indian Institute of Technology (BHU), Varanasi 221005, India
c
Department of Control Engineering and Robotics, West Pomeranian University of Technology, Szczecin, Poland
a r t i c l e i n f o
Article history:
Received 23 August 2016
Received in revised form
3 April 2017
Accepted 25 May 2017
Available online 16 June 2017
Keywords:
Indirect vector controlled induction motor
Coupling
Iterative linear matrix inequality
H1 controller
Proportional-integral design
a b s t r a c t
Decoupling of the stator currents is important for smoother torque response of indirect vector controlled
induction motors. Typically, feedforward decoupling is used to take care of current coupling that requires
exact knowledge of motor parameters, additional circuitry and signal processing. In this paper, a method
is proposed to design the regulating proportional-integral gains that minimize coupling without any
requirement of the additional decoupler. The variation of the coupling terms for change in load torque is
considered as the performance measure. An iterative linear matrix inequality based ∞H control design
approach is used to obtain the controller gains. A comparison between the feedforward and the proposed
decoupling schemes is presented through simulation and experimental results. The results show that the
proposed scheme is simple yet effective even without additional block or burden on signal processing.
& 2017 ISA. Published by Elsevier Ltd. All rights reserved.
1. Introduction
Vector control in induction motor (IM) is used to make it behave
like a separately excited direct current (DC) motor. The vector
control of IM is realized in either of two ways: direct and indirect.
Because of its simplicity and high performance, indirect one is often
preferred over the direct one. To generate the instantaneous torque
using indirect vector control (IVC) scheme [1], two current com-
ponents (the direct and quadrature ones) are to be controlled in-
dependently. The available current-loop control schemes are based
on synchronous reference frame control (SRFC), stationary re-
ference control (SRC), and hysteresis control [2]. Although SRC is
simpler than the SRFC one, the latter one is preferred since it op-
erates on DC quantities and zero steady-state error. These benefits
can be achieved if the regulator gains are chosen efficiently [2]. For
such regulation, the reference quadrature current is given by the
outer speed-loop, which is realized by linear, intelligent control
techniques and nonlinear methods [3–8]. However, these compo-
nents are inherently coupled through the motor dynamics which
affects the IM torque response.
The coupled flux and torque dynamics behavior along with rotor
resistance variation effect have been studied in [9]. The severity of
this coupling on motoring operation depends on the control
application. During the low-speed IM operation, the coupling effect
can be neglected. Erstwhile, for high-speed operation, fast torque
response is difficult to achieve without proper decoupling [10]. For
overcoming the coupling effect, many decoupling techniques have
been discussed. A complex vector synchronous frame proportional-
integral (PI) controller design has been proposed in [11] to enhance
the performance of synchronous PI controller. Specifically, para-
meter variation causes errors in the estimated flux that may lead to
the reduction of the torque performance. To overcome this, a
modified decoupling control has been proposed in [12]. Additional
PI controller has been used to perform the decoupling in [13]. An
internal-model-control (IMC) based decoupling has also been re-
ported in [14], where additional integrator dynamics has been used
to minimize the coupling. Further, a dynamic controller structure
for the current controllers have been used in [10] to achieve de-
coupling. The rotor time-constant estimation based decoupling has
been suggested in [15]. A new adaptive observer based speed esti-
mation technique has been proposed in [16] that may be used for
decoupling. Multivariable PI based decoupling scheme has been
discussed in [17]. Here, similar to the IMC based decoupling [14],
inclusion of integrators have been used for mitigating the coupling.
Despite these modifications, the feedforward decoupling method
[18] is still preferred due to its straight-forwardness and faster de-
coupling ability.
Apart from the above linear decoupling schemes, a sliding
mode control based decoupling has been developed in [19,20].
Due to the lack of antiwindup capability in [19], the proposed
controller may saturate at high speed limiting its application to
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/isatrans
ISA Transactions
http://dx.doi.org/10.1016/j.isatra.2017.05.016
0019-0578/& 2017 ISA. Published by Elsevier Ltd. All rights reserved.
n
Corresponding author.
E-mail addresses: jitendra1610@gmail.com (J.Kr. Jain),
sghosh.eee@itbhu.ac.in (S. Ghosh), somnathm@nitrkl.ac.in (S. Maity),
pawel.dworak@zut.edu.pl (P. Dworak).
ISA Transactions 70 (2017) 378–388](https://image.slidesharecdn.com/pi-controller-design-for-indirect-vector-controlled-inductio2017isa-transa-180807171749/75/PI-controller-design-for-indirect-vector-controlled-induction-motor-1-2048.jpg)
![low load conditions for which the coupling is itself weak. Also, it
requires low-pass filters to remove the chattering effect. The de-
coupling is also been attempted in sensorless control scheme [21].
A nonlinear observer is proposed to estimate the motor speed,
which is used to compensate the speed dependent cross-coupled
terms. A modified IVC scheme based decoupling for current source
IM drive has been given in [22]. Besides these decoupling meth-
ods, energy efficient model based control (MBC) has been dis-
cussed in [23] to improve the torque performance. In this work,
the MBC dynamical behavior for load transition has been analyzed
in detail and new control strategies have been proposed. In a re-
cent work [24], an SRC based cascaded combination of a PI con-
troller and a compensator has been designed for satisfying speci-
fied decoupling performance. In this scheme, no feedforward
terms are employed, and the design criterion is simple based on
gain margin (GM) and phase margin (PM) criterion. However, this
robust stability based design involves a comparatively complicated
structure than the conventional SRFC. In addition, since GM and
PM of a multi-input multi-output (MIMO) system is involved in
this design, the trade-offs of different performances, e.g., decou-
pling and robustness, are hard to obtain.
Modified PI controller based decoupling methods have been
developed in [11,13,14,17]. However, all these methods in-
corporate additional dynamics and/or induce complexity in the
conventional indirect vector controlled induction motor (IVCIM)
system. Moreover, the tuning of the PI controller, otherwise used
for current regulations, also has an impact on the coupling [19].
Despite the fact that such tuning has limited scope to minimize
coupling. However, due to its simplicity and classical performance,
it is considered as a better method for decoupling rather than
introducing additional dynamics.
Typically, for designing a PI controller, frequency response
(Bode plot) method is considered as simple. However, the ro-
bustness of the system is difficult to assess using such method
[25]. On the other hand, for the controller design of finite di-
mensional linear time invariant systems, static output feedback
(SOF) technique has been used in [26,27]. This technique has the
advantages of simple closed-loop controller structure and flex-
ibility of the design combined with an ∞H control. The present
work is on SOF based PI design of the speed as well as the current
controllers to achieve decouple transient performance. By this
method, the same classical IVCIM structure is retained. The fol-
lowing contributions are made in this work: (i) Sensitivity of stator
currents on inner-loop controller gains is determined. (ii) The
decoupling effect is formulated as a performance criterion for
speed and current-loop controller design. (iii) An MIMO SOF based
closed-loop structure is formulated for the linearized model of the
IVCIM. (iv) An iterative linear matrix inequality (ILMI) based
controller design technique is applied to design the PI gains.
(v) Simulation and experimental results are presented that cor-
roborates the effectiveness of the proposed controller design
technique as compared to the conventional feedforward decou-
pling one.
The remaining of the paper is organized as follows: Section 2
presents the IVCIM model. The classical feedforward decoupler
and sensitivity of stator currents are discussed in Section 3. Section
4 shows the formulation of the coupling minimization problem.
The PI controller design algorithm is presented in Section 5.
Comparison of the proposed method with feedforward one
through simulation and experimental results is given in Section 6.
Finally, conclusions are pointed out in Section 7.
2. State-space model of IVCIM
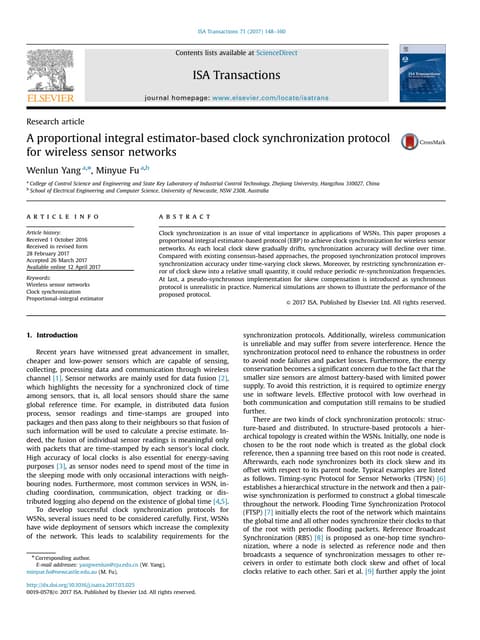
The IVCIM drive system [28,29] for speed regulation, is shown
in Fig. 1. In this system, the rotor speed is regulated by an outer
loop PI controller. The output of this controller is used to generate
the torque and the flux reference components of the current.
These reference currents are compared with the actual motor
currents and applied to respective PI current controllers in order to
regulate the input voltage to the induction motor. The IM model is
structured with the underneath assumptions:
1. Both the stator and rotor windings are arranged symmetrically.
2. The following are neglected: the dynamics associated with
nonlinear magnetic circuits; the harmonic content of the mag-
neto motive force (MMF) wave; variation in rotor resistance due
to the changes in temperature and frequency.
3. The load torque is considered as constant.
4. The reference flux is taken as the rated flux of the motor.
The dynamic induction motor model in synchronous reference
frame is given by [28]:
Fig. 1. Indirect vector control of induction motor.
J.Kr. Jain et al. / ISA Transactions 70 (2017) 378–388 379](https://image.slidesharecdn.com/pi-controller-design-for-indirect-vector-controlled-inductio2017isa-transa-180807171749/85/PI-controller-design-for-indirect-vector-controlled-induction-motor-2-320.jpg)
![⎫
⎬
⎪
⎪
⎪
⎪
⎪
⎪⎪
⎭
⎪
⎪
⎪
⎪
⎪
⎪
⎪
( )
ω σψ ω ψ
ω ω ψ σψ
ψ
σ σψ ω ω ψ
ψ
σ ω ω ψ σψ
ω
ω
= − + + + +
= − − − + +
= − + ( − )
= − ( − ) −
= ( − ) −
1
di
dt
ai i b b cv
di
dt
i ai b b cv
d
dt
L i
d
dt
L i
J
d
dt
K T T B
ds
ds e qs dr r qr ds
qs
e ds qs r dr qr qs
dr
m ds dr e r qr
qr
m qs e r dr qr
r
m e L m r
where
( )
ψ ψ= ( − ) = = = +
− −
T K i i K K a, , , ,e t qs dr ds qr t
PL
L m
P R L
L L L
L R
L L L L
3
4 2
m
r
s r
r s m
m r
r s m r
2
2
2
= =
− −
b c,
L
L L L
L
L L L
m
r s m
r
r s m
2 2
, ids and iqs are the direct and quadrature
components of stator current; ψdr and ψqr are the direct and
quadrature components of rotor fluxes; ωr is angular electrical
speed of the rotor; Te is the motor electromechanical torque; ωe is
the speed of the synchronously rotating reference frame; Ls, Lr and
Lm are the stator, rotor, and mutual inductance, respectively; Rs
and Rr are the stator and rotor resistances, respectively; σ = γ
1
is
the inverse of rotor time constant where γ =
L
R
r
r
; P is the number of
poles; J is the moment of inertia; TL is the external load torque; Bm
is the viscous friction coefficient.
The output of the current controller are the stator voltages,
which can be written from Fig. 1 as:
( ) ( )∫ ∫= + ( − ) = + ( − )
( )
v K K dt i i v K K dt i i,
2ds pd id dsref ds qs pq iq qsref qs
where Kpd and Kpq are the proportional constants for the direct and
quadrature current components, respectively; Kid and Kiq are the
integral constants for the direct and quadrature current
controllers, respectively.
Now, the IVC scheme for induction motor is governed by the
following equation [28]:
⎫
⎬
⎪
⎪
⎭
⎪
⎪( )∫ ( )
ψ γψ
ψ
ω
σ
ψ
ω ω ω ω ω
=
+ ̇
= =
= + ( − ) = +ω ω
3
i
L
i
T
K
L i
T K K dt
, , ,
,
dsref
drref drref
m
qsref
re
t drref
sl
m qsref
drref
re p i ref r e r sl
where idsref is the reference flux component of current; iqsref is the
reference torque component of current; ψdrref is the reference flux; Tre
is the torque output from the speed loop controller; ωref is the re-
ference speed command; ωKp and ωKi are the speed controller gains.
By defining =x ids1 , =x iqs2 , ψ=x dr3 , ψ=x qr4 , ω ω= ( − )x ref r5 ,
=x Tre6 , ∫= ( − )x i i dtdsref ds7 , ∫= ( − )x i i dtqsref qs8 , the state space
model can be written as:
⎡
⎣
⎤
⎦
⎫
⎬
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪⎪
⎭
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
( )
[ ]
[ ]
( )
ω σ ψ σ ω
ψ
ω σ ψ ω σ
ψ
σ σ σ ψ
σ σ σ ψ
ω
ω
γψ ψ
ψ
̇ = − + [ − + ( ) ] + + ( − ) +
− +
̇ = −[ − + ( ) ] − − ( − ) + +
( ) − +
̇ = − + ( )
̇ = − − ( )
̇ = − ( − ) − + ( − )
̇ = − [ ( − ) − − ( − )] +
̇ = ̇ + −
̇ = ( ) −
ω ω
−
−
−
−
−
−
− −
−
4
x ax x L K x x b x b x x
cK L x cK x
x x L K x x ax b x x b x
cK K x x cK x
x L x x L K x x
x L x x L K x x
Jx K K x x x x T B x
Jx K K K x x x x T B x JK x
x L L x
x K x x .
ref m t drref ref
pd m drref id
ref m t drref ref
pq t drref iq
m m t drref
m m t drref
m t L m ref
p m t L m ref i
m drref m drref
t drref
1 1 5
2 1
6 2 3 5 4
1
1 7
2 5
2 1
6 1 2 5 3 4
1
6 2 8
3 1 3
2 1
6 4
4 2 4
2 1
6 3
5 2 3 1 4 5
6 2 3 1 4 5 5
7
1 1
1
8
1
6 2
3. Inner-loop feedforward decoupler
In order to elaborate the coupling problem, consider rewriting
the stator current dynamics following (4) as:
⎡
⎣
⎤
⎦
⎡
⎣
⎤
⎦
⎫
⎬
⎪
⎪
⎪
⎭
⎪
⎪
⎪
ω σ ψ σ
ω
ω σ ψ
ω σ
̇ = − + − + ( ) +
+ ( − ) +
̇ = − − + ( ) −
− ( − ) + + ( )
−
−
x ax x L K x x b x
b x x cv
x x L K x x ax
b x x b x cv 5
ref m t drref
ref ds
ref m t drref
ref qs
1 1 5
2 1
6 2 3
5 4
2 5
2 1
6 1 2
5 3 4
In the above, both ids and iqs are dependent on each other, ad-
ditionally on ψdr, ψqr and ωr. These are coupled through the re-
maining system dynamics. However, for obtaining a torque re-
sponse similar to a DC motor, the flux, and torque components of
currents are required to be decoupled while regulating the re-
spective currents.
The torque performance can be improved by compensating the
coupled terms. However, the perfect compensation of all the
connected components requires an accurate update knowledge of
the motor parameters. This is almost impossible in practice since
induction motor parameters are known to have variations during
operation, e.g., the rotor resistance variation [30]. In [10], it has
been observed that (i) ω ie ds and ω ie qs are the dominating compo-
nents in the respective currents, and (ii) the coupling effect in-
creases as motor speed increases. So, either by removing or
minimizing these dominating components, the effect of coupling
phenomenon can be reduced. One way to achieve such reduction
in coupling is, by introducing a supplementary feedforward con-
troller to the current controller output as shown in Fig. 2(a) [31]. In
this, a direct feedforward compensation vds
comp
and vqs
comp
cor-
responding to the dominating components are used.
The compensation voltage signals are:
⎡
⎣⎢
⎤
⎦⎥( )ω
ω σ ψ
= − = −
− +
( )
−
v
i
c
x x L K x
c 6ds
comp e qs
ref m t drref2 5
2
1
6
⎡
⎣⎢
⎤
⎦⎥( )ω
ω σ ψ
= =
− +
( )
−
v
i
c
x x L K x
c
.
7qs
comp e ds
ref m t drref1 5
2
1
6
The effect of such decoupling method for the IM (Parameters are
given in Section 6) is shown in Fig. 2(b). This can be seen that for a
change in TL (6.5 N Á m applied at 10 s), the effect in ids is con-
siderably reduced by the decoupler.
Note that, the above result is obtained while considering same
speed and current-loop controller gains. However, for a different
set of these controller gains, the performance of the decoupling
scheme varies. Moreover, it may be possible to improve the de-
coupling by suitable choice of the regulatory PI gains. Since feed-
forward decoupling scheme introduces complexity in IVCIM and it
is more susceptible to parameter variations [10], an alternate
method is proposed in this work.
3.1. Decoupler sensitivity
3.1.1. Current controller tuning effect
For IVCIM, the coupling is primarily affected by inner-loop
controller tuning. Since cross-couplings exist between the two
current loops, controller tuning for the d-axis stator current may
affect the q-axis one and vice versa. The sensitivity of the currents
with respect to the cross-controller gains are studied here.
J.Kr. Jain et al. / ISA Transactions 70 (2017) 378–388380](https://image.slidesharecdn.com/pi-controller-design-for-indirect-vector-controlled-inductio2017isa-transa-180807171749/85/PI-controller-design-for-indirect-vector-controlled-induction-motor-3-320.jpg)
![The sensitivity expression is determined following procedure in
[32]. For the purpose, first, the linearized closed-loop IVCIM model
is obtained as follows. Let xe
(xi
e
, = …i 1, , 8) be the equilibrium
state of (4). It can be determined following the vector control
principle [28,33] as:
ψ ω
ψ
ψ
ψ
= =
+
=
= = = ( )
x
L
x
B K T
K K
x
x x x K x
, , ,
0, , 8
e drref
m
e m ref m L
m t drref
e
drref
e e e
t drref
e
1 2 3
4 5 6 2
x7
e
and x8
e
depends on inner-loop control parameters and can also
be determined from (4). The linearized model is obtained by re-
placing = + Δx x xe
in (4). Neglecting the current-loop integrators
and outer speed-loop dynamics, the linearized closed-loop IVCIM
model in SISO form (only ids as the output) can be written as:
Δ ̇ = Δ Δ = Δ ( )− − −x G x x C x, 91 4 1 4 1 1 4
where ⎡⎣ ⎤⎦Δ = Δ Δ Δ Δ−x x x x x ,
T
1 4 1 2 3 4
⎡
⎣
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
=
⋯
⋮ ⋮ ⋮
⋯
G
g g
g g
11 14
41 44
, = − −g a cKpd11
,
ω=g e12
, σ=g b13
, ω=g b ref14
, ω= −g e21
, = − −g a cKpq22
,
ω= −g b ref23
, σ=g b24
, σ=g Lm31
, =g 032
, σ= −g33
, ω=g sl34
,
=g 041
, σ=g Lm42
, ω= −g sl43
, σ= −g44
, ⎡⎣ ⎤⎦=C 1 0 0 0 .
With a perturbation ΔKpq in Kpq, the above can be written as:
Δ ̇ = Δ + Δ Δ = Δ ( )− − − −x G x Gx x C x, 10
e
1 4 1 4 1 4 1 1 4
where ΔG represents perturbed system matrix as
⎡
⎣
⎢
⎢
⎤
⎦
⎥
⎥
Δ = Δ Δ
×
× ×
G
M
K K
0
0 0
,pq pq
2 2
2 2 2 2
is the variation in K ,pq
⎡⎣ ⎤⎦=−x x x x xe e e e e T
1 4 1 2 3 4 ,
⎡
⎣⎢
⎤
⎦⎥=
−
M
c
0 0
0
.
Now, the sensitivity function for Δids can be derived from (10)
as:
Δ
Δ
= −
( )
i
K
ch i
Q 11
ds
pq
qs
e
12
where s represents complex frequency, =h g g g12 12 34 43
+ + − − −g g g g g g g g g g g g g g g13 32 44 14 33 42 12 33 44 13 34 42 14 32 43
, = −Q sI G.
Similarly, considering the dynamics involving only iqs as the
output, the sensitivity function for Δiqs can be determined as:
Δ
Δ
= −
( )
i
K
ch i
Q 12
qs
pd
ds
e
21
where ΔKpd is the variation in Kpd, = +h g g g g g g21 21 34 43 23 31 44
+ − − −g g g g g g g g g g g g .24 33 41 21 33 44 23 34 41 24 31 43
The above sensitivities are studied here for an IM with the
parameters given in Section 6 later. For evaluating (11), the equi-
librium point is determined at TL ¼ 5 N Á m (chosen arbitrarily) and
ω ω≃e r ¼ 80 rad/s. These sensitivity functions are analyzed with
the magnitude plot as shown in Fig. 3(a). It is observed that the
current perturbations can be minimized by tuning the controller
with high Kpd and Kpq. However, due to non-ideality, noises and
delay in physical implementation, higher gains may actuate os-
cillations of large magnitude or instability, hence a systematic
design is required. The sensitivity of ids with feedforward decou-
pler is shown in Fig. 3(b). For this, the equilibrium point is de-
termined at TL ¼ 5 N Á m and with ωe ¼ 0 (perfect compensation is
considered). It is observed that high controller gains reduce the
current perturbations, however, sensitivity is slightly lower with
this decoupling as compared to the without decoupler case. The
sensitivity of ids (without decoupling) with variation in frequency
is shown in Fig. 4(a). It is observed that sensitivity is high at low
frequency (ω ¼ 0.1 rad/s). As frequency reaches 20 rad/s, a small
peak is observed due to the cancellation of motor dynamics [14].
Furthermore, it is reduced with increasing frequency and Kpd, Kpq.
Note that, h12 and Q depend on Rr and Lm. Since an accurate
information of these parameters is impossible to get in practice,
Fig. 2. (a) Feedforward decoupling of inner-loop. (b) Behavior of ids for feedforward decoupling scheme.
Fig. 3. Sensitivity of ids on controller gains: (a) Without decoupler. (b) With decoupler.
J.Kr. Jain et al. / ISA Transactions 70 (2017) 378–388 381](https://image.slidesharecdn.com/pi-controller-design-for-indirect-vector-controlled-inductio2017isa-transa-180807171749/85/PI-controller-design-for-indirect-vector-controlled-induction-motor-4-320.jpg)
![perturbations may affect the IVCIM performance. The effect of
improper parameter estimation on current controller gain sensi-
tivity is also shown in Fig. 4(b). It is observed that, in feedforward
decoupling, overestimation in compensation signals increase the
magnitude. However, it is less affected when decoupler is not
used. The variation effect of ωr on sensitivity is depicted in Fig. 5. It
is observed that higher ωr increases sensitivity.
3.1.2. Parameter variation effect
In feedforwad decoupling scheme, the compensation terms
vds
comp
and vqs
comp
are function of ωsl and c, which depends on Rr
and Lm, respectively. Both of these IM parameters may vary with
temperature, ageing and other environmental reasons [30]. For
determining Rr variation effect on feedforward decoupling, ΔG in
(10) is written as:
⎡
⎣
⎢
⎢
⎤
⎦
⎥
⎥
ωΔ =
−
−
Δ
( )
×
×
G
E
E
0
0 13
sl
2 2
2 2
where
⎡
⎣⎢
⎤
⎦⎥=
−
E
0 1
1 0
, ωΔ = ψ
Δ
sl
R L i
L
r m qs
e
r drref
, ΔRr represents perturbation in Rr.
The corresponding sensitivity is obtained as
ω
ψ ψΔ
Δ
=
− + + −
( )
i h i h i h h
Q 14
ds
sl
qs
e
ds
e
qr
e
dr
e
11 12 13 14
where
= + + − − −h g g g g g g g g g g g g g g g g g g12 12 34 43 13 32 44 14 33 42 12 33 44 13 34 42 14 32 43
,
= + + − − −h g g g g g g g g g g g g g g g g g g13 12 23 44 13 24 42 14 22 43 12 24 43 13 22 44 14 23 42
,
= + + − − −h g g g g g g g g g g g g g g g g g g14 12 24 33 13 22 34 14 23 32 12 23 34 13 24 32 14 22 33
. The
stator current sensitivity magnitude for Rr variation ( )20% is shown in
Fig. 6(a). It is observed that sensitivity is comparatively larger with
decoupler (ωe ¼ 0). The corresponding sensitivity magnitude varia-
tion with change in Kpd and Kpq is shown in Fig. 6(b). It is observed
that, initially, the magnitude with decoupler is higher for low fre-
quency (up to 20 rad/s). However, it is reduced with higher Kpd and
Kpq, e.g., = =K K 100pd pq and frequency. A further increment in Kpd
and Kpq reduces the sensitivity magnitude with a marginal value. This
shows that the system is quite sensitive to parameter variations.
4. Coupling minimization problem
Considering the disturbance input to the system through the
variations in load torque TL that can be modeled as disturbance
⎡⎣ ⎤⎦Δ = Δw TL , the linearized dynamics of (4) can be represented as:
⎫
⎬
⎪
⎭
⎪
Δ ̇ = Δ + Δ + Δ
Δ = Δ
Δ = Δ ( )
x A x B w B u
z C x
y C x 15
1 2
1
2
where ⎡⎣ ⎤⎦Δ = Δ Δ Δ Δ Δ Δ Δ Δx x x x x x x x x
T
1 2 3 4 5 6 7 8 represents the
linearized states, Δy and Δz are the measured and desired outputs,
respectively, Δw is the disturbance and Δu represents the control
input. The corresponding plant matrix A is given by:
Fig. 4. Sensitivity of ids with variation in frequency at ωe ¼ 80 rad/s: (a) Varying Kpd, Kpq. (b) =K Kpd pq ¼ 100 and 35% overestimation of Rr and Lm.
⎡
⎣
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
( )
( )
ω σ ω
ω ω σ
σ σ
σ σ=
− − + − − −
− − − − − + −
−
− − −
− − −
−
−
σ
ψ
σ
ψ
σ
ψ
σ
ψ
σ
ψ
σ
ψ
σ
ψ
σ
ψ
ψ
A
a x b b x x bx
x a b x b x bx
L
L
0 0
0 0
0
0 0 0 0 0 0
1 0 0 0 0 0
0 1 0 0 0
.
ref
e L x
K
ref
e e e L x
K
e
ref
L x
K
ref
e e e L x
K
m
L x
K
L x
K
m
L x
K
L x
K
K K x
J
K K x
J
K K x
J
K K x
J
B
J
K
11
5 5 2 4
5 5 1 3
1
m
e
t drref
m
e
t drref
m
e
t drref
m
e
t drref
m
e
t drref
m
e
t drref
m
e
t drref
m
e
t drref
m t
e
m t
e
m t
e
m t
e
m
t drref
6
2
2
2
6
2
1
2
6
2
4
2
6
2
3
2
4 3 2 1
J.Kr. Jain et al. / ISA Transactions 70 (2017) 378–388382](https://image.slidesharecdn.com/pi-controller-design-for-indirect-vector-controlled-inductio2017isa-transa-180807171749/85/PI-controller-design-for-indirect-vector-controlled-induction-motor-5-320.jpg)
![⎡⎣ ⎤⎦= ( )×A A 0 1611 8 2
where
The input matrices are as:
⎡
⎣
⎢
⎤
⎦
⎥=
( )
B
K
J
0 0 0 0 0 0 0
17
m
T
1
and
⎡
⎣
⎢
⎢
⎤
⎦
⎥
⎥=
( )
B
c
c
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 1 0 0
.
18
T
2
The PI controller is defined as:
Δ = Δ ( )u F y 19
where F contains PI gains of all the loops as:
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
=
ω ω
F
K K
K K
K K
0 0 0 0
0 0 0 0
0 0 0 0
pd id
pq iq
p i
For minimizing the effect of iqs variation, the dominating nonlinear
terms ω ie ds and ω ie qs are linearized and chosen as the performance
variables. Correspondingly, output performance matrix C1 is ob-
tained as
⎡
⎣
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥ ( )
ω
σ
ψ
ω
σ
ψ
σ
ψ
σ
ψ
=
− +
− +
20
C
x
L x
K
x
L x
K
x
L x
K
x
L x
K
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
ref
e m
e
t drref
ref
e m
e
t drref
e
m
e
t drref
e
m
e
t drref
1
5
6
2
5
6
2
2
2
2
1
1
2
and output feedback matrix is:
⎡
⎣
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
( )
ψ
=
−
−
− − −
21
C
K
K K x
J
K K x
J
K K x
J
K K x
J
B
J
1 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0
0 1 0 0 0
1
0 0
0 0 0 0 0 0 0 1
0 0 0
0 0 0 0 1 0 0 0
.
t drref
m t
e
m t
e
m t
e
m t
e
m
2
4 3 2 1
In the coupling minimization problem, one need to design F (static
feedback controller matrix). Here, F is in a block-diagonal structure
which is treated in decentralized controller design framework. In this
work, the decoupling objective is defined as: to tune F for minimizing
the effect of load perturbation Δw on performance variables Δz.
5. PI controller design
For the present problem, SOF based PI controller design algo-
rithm [27] is used. Referred to the system dynamics (15), the effect
of the disturbance Δw on Δz can be quantified by the ∞ norm of
the closed-loop system H(F) as:
ρ∥ ( )∥ =
Δ ( )
Δ ( )
≤
( )
∞
Δ ( )≠
H F
z t
w t
max
22w t 0
2
2
where . 2 represents the L2-norm.
In respect to the above, minimizing ρ yields a controller with
good disturbance rejection behavior. For this, the below result is
well known [26].
Theorem 1. System (15) along with feedback gain (19) satisfies ∞H
performance of ρ in (22) if there exists a = >L L 0T
satisfying
Fig. 5. Sensitivity of ids with variation in frequency at = =K K 100pd pq for different
choices of ωr.
Fig. 6. Sensitivity of ids on change in Rr with variation in frequency for feedforward decoupler: (a) = =K K 10pd pq . (b) Varying Kpd, Kpq.
J.Kr. Jain et al. / ISA Transactions 70 (2017) 378–388 383](https://image.slidesharecdn.com/pi-controller-design-for-indirect-vector-controlled-inductio2017isa-transa-180807171749/85/PI-controller-design-for-indirect-vector-controlled-induction-motor-6-320.jpg)
![⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
ρ
ρ
+
−
−
<
( )
A L LA LB C
B L I D
C D I
0
23
c
T
c c c
T
c
T
c
T
c c
where = +A A B FCc 2 2, = +B B B FDc 1 2 21, =C Cc 1 and =D 0c .
The above criterion satisfies ∞H performance (22) for a chosen ρ
and is a nonlinear matrix inequality for synthesis of F due to multi-
plication of unknown L and F matrices. In order to design the PI
controllers embedded in F, procedures utilizing the benefits of solving
LMIs is adopted. It may be noted that LMIs are convex optimization
problems and computational tools are available for solving them [34].
Note that, (23) can be written as:
¯ ¯ + ¯ ¯ + (¯ ¯ ¯ ) + ¯ ¯ ¯ < ( )A L LA LBFC LBFC 0 24
T T
where
⎡
⎣
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎡
⎣
⎢
⎢
⎤
⎦
⎥
⎥
⎡
⎣
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎡
⎣
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
ρ
ρ
¯ = −
−
¯ = ¯ = ¯ =A
A B
I
C I
L
L
I
I
B
B
C
C
D
0
0 /2 0
0 /2
,
0 0
0 0
0 0
, 0
0
,
0
.
T
1
1
2 2
21
The inequality (24) is satisfied if one can achieve
¯ ¯ + ¯ ¯ − ¯ ¯ ¯ ¯ + ( ¯ ¯ + ¯ ) ( ¯ ¯ + ¯ ) < ( )A L LA LBB L B L FC B L FC 0 25
T T T T T
In (25), the ¯ ¯ ¯ ¯LBB L
T
term is nonlinear since it involves multiplication
of the unknown variable ¯L with itself. To solve (25) from here, one
adhere to an iterative process introducing an updating variable ¯X
in the place of ¯L. For the purpose, note that, for any ¯X the following
is satisfied.
¯ ¯ ¯ ¯ ≥ ¯ ¯ ¯ ¯ + ¯ ¯ ¯ ¯ − ¯ ¯ ¯ ¯ ( )L BB L X BB L L BB X X BB X 26
T T T T T T T T
Replacing (26) into (25), one gets
( )¯ ¯ + ¯ ¯ − ¯ ¯ ¯ ¯ − ¯ ¯ ¯ ¯ + ¯ ¯ ¯ ¯ + ( ¯ ¯ + ¯ ) ( ¯ ¯ + ¯ ) < 27A L LA XBB L LBB X XBB X B L FC B L FC 0
T T T T T T T
The above is an LMI on the variables ¯L and F that satisfies (25) and
thereby (23) for any ¯X. Moreover, ¯ = ¯X L yield the least con-
servative solution of (27) with respect to the bounding (26). Fur-
ther, it may be considered that there exists a <r 0 for which (26) is
equivalent to
¯ ¯ + ¯ ¯ − ¯ ¯ ¯ ¯ − ¯ ¯ ¯ ¯ + ¯ ¯ ¯ ¯ + ( ¯ ¯ + ¯ ) ( ¯ ¯ + ¯ )
− ¯ < ( )
A L LA XBB L LBB X XBB X B L FC B L FC
rL 0 28
T T T T T T T
The LMI (28) is solved iteratively starting with an initial ¯X and
then updating ¯X with the new ¯L in each iteration with the re-
laxation introduced by the use of r. Once r reaches negative value,
the feasibility of (27) is attained. Using Schur complement, (28)
can be written in LMI form as:
⎡
⎣
⎢
⎢
⎤
⎦
⎥
⎥ ( )
¯ ¯ + ¯ ¯ − ¯ ¯ ¯ ¯ − ¯ ¯ ¯ ¯ + ¯ ¯ ¯ ¯ − ¯ ( ¯ ¯ + ¯)
* −
<
29
A L L A X BB L L BB X X BB X rL B L FC
I
0
T
i i i
T
i i
T
i i
T
i i i
T
i
T
Finally, to start with an initial ¯X following (26), one considers
solving for ¯L satisfying
¯ ¯ + ¯ ¯ − ¯ ¯ ¯ ¯ < ( )A L LA LBB L 0. 30T T T
Using Schur complement, (30) can be written in LMI form as:
⎡
⎣
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
ρ
ρ
^
+
^
−
^
* −
* * −
<
( )
LA AL B B B LC
I
I
0 0
31
T T T
2 2 1 1
Table 1
Experimental IM parameters.
Notation Value Notation Value
P 4 Ωb (rated speed) 1410 rpm
Rs 5.12 Ω Rr 2.26 Ω
Ls 0.332 H Lr 0.338 H
Lm 0.320 H J 0.085 kgm2
Fig. 7. Bode plot for inner-loop PI controllers: (a) d current component. (b) q
current component.
Table 2
Initial parameters for Algorithm 1
Notation Value Notation Value
ψdrref 0.65 Wb ωref 80 rad/s
Bm 0 N Á m/
rad/s
TL 0 N Á m
Table 3
Controller gains.
Description Notation and value
Existing design
Current controller [19] Kpd ¼ 8.97, Kid ¼ 1536, Kpq ¼ 8.97, Kiq ¼ 2142
Current controller [2] Kpd ¼ 0.53, Kid ¼ 247, Kpq ¼ 0.53, Kiq ¼ 247
Proposed design
Current controller Kpd ¼ 108, Kid ¼ 4636, Kpq ¼ 2.2, Kiq ¼ 123
Speed controller ωKp ¼ 0.4, ωKi ¼ 1.2
J.Kr. Jain et al. / ISA Transactions 70 (2017) 378–388384](https://image.slidesharecdn.com/pi-controller-design-for-indirect-vector-controlled-inductio2017isa-transa-180807171749/85/PI-controller-design-for-indirect-vector-controlled-induction-motor-7-320.jpg)
![Based on the above development, the below ILMI algorithm is
used to design the controller F.
Algorithm 1. Obtain the values A, B1, B2, C1, C2 of the IVCIM model
as per (15).
1: Set i¼0. Specify a ρ > 0 and solve for >L 0 satisfying (31).
2: Update = +i i 1 and =X L1 .
3: Solve for = >L L 0T
and F while minimizing r using gevp
program in MATLAB satisfying (28).
4: If <r 0 or the iteration i reached a limit then go to next step,
else go to step 3.
5: If <r 0 then assign =F Ffinal , ρ ρ=final
, reduce ρ and go to
step 2. Else stop, Ffinal is the required controller gain matrix.
Remark 1. Since the final controller design depends on the con-
vergence of the above Algorithm 1, the proposed method may be
hindered by possible convergence failure in online implementa-
tion, particularly with variation in ψdrref and ωref. This can be
overcome by offline tuning of the controller parameters and then
using look-up tables for online implementation.
6. Validation and discussions
6.1. Simulation results
An IVCIM (Fig. 1) having the machine parameters in Table 1 is
used for validating the proposed design. First, the conventional
feedforward design is tested. The inner-loop PI design techniques
have been discussed in [19,2,35]. However, corresponding to
higher bandwidth requirement, current controller gains are
Fig. 8. Comparison between proposed and feedforward decoupling for a step =T 6.5L N Á m applied at 10 s: (a) Stator current ids. (b) Stator current iqs.
Fig. 9. ωr for change in ωref in step ( → )100 150 .
Fig. 10. Parameter variation effect on behavior of ids.
Fig. 11. Measurement noise affect on ids: (a) Feedforward decoupling. (b) Proposed decoupling.
J.Kr. Jain et al. / ISA Transactions 70 (2017) 378–388 385](https://image.slidesharecdn.com/pi-controller-design-for-indirect-vector-controlled-inductio2017isa-transa-180807171749/85/PI-controller-design-for-indirect-vector-controlled-induction-motor-8-320.jpg)
![selected according to the placement of the closed-loop poles and
zeros of the IVCIM [19], not the sliding mode controller. This de-
sign considers ids and iqs are decoupled. Here, the poles are chosen
as 300. Next, zeros are selected to cancel the plant IM poles. The
obtained gains are given in Table 3. Fig. 7 shows the Bode plot of
the transfer function ( ) ( )C s H s , where C(s) is the current-loop PI
controller and H(s) is the corresponding open-loop transfer func-
tion considering single-input single-output model. The bandwidth
of the current loops for the designs of [19] and [2] are 380 rad/s,
400 rad/s and 45 rad/s, 45 rad/s for the d and q current compo-
nents, respectively. Whereas, the proposed approach provides a
bandwidth of 5000 rad/s for the d current component, which is
Fig. 12. Experimental setup.
Fig. 13. Experimental result for variation in TL: (a) Without decoupling [19]. (b) Without decoupling [2]. (c) Feedforward decoupling. (d) Proposed decoupling.
J.Kr. Jain et al. / ISA Transactions 70 (2017) 378–388386](https://image.slidesharecdn.com/pi-controller-design-for-indirect-vector-controlled-inductio2017isa-transa-180807171749/85/PI-controller-design-for-indirect-vector-controlled-induction-motor-9-320.jpg)
![higher than both the existing designs and represents faster inner-
loop response and 38 rad/s for the q current component.
For the proposed design, first, the parameter ρ in Algorithm 1 is
chosen as 12. The reference inputs and the obtained gains are
shown in Table 2 and 3, respectively. It may be noted that the
proposed one yields higher Kpd, Kid but lower Kpq, Kiq. However,
without systematic design procedure, it is difficult to arrive at such
gains. Note that, the same speed-loop gains are used to compare
the decoupling performance of the current controller design
methods [19,2].
First, the above two designs are assessed through simulation.
The load variation effect on coupling is shown in Fig. 8. It is assessed
that as TL is increased from 0 to 6.5 N Á m (chosen arbitrarily), ids of
the feedforward decoupling scheme produces a larger shoot.
Whereas, in the proposed decoupling, a smaller overshoot occurs in
ids. The outer speed-loop robustness is tested with a step change in
ωref from →100 150 rad/sec. The corresponding ωr response in
Fig. 9 shows robustness to the sudden variation in ωref.
Since ωsl and parameter c are susceptible to variations, the
feedforward scheme may lead to mismatch in compensation [10].
By considering total 50% variation (35% in Rr, 15% in Lm and Ls), the
effect of feedforward decoupling on ids is shown in Fig. 10. It is
observed that as TL is changed at 10 s, such parameter variation
deteriorates ids current of the feedforward decoupling method.
This behavior corroborates the result in Section 3. Whereas, the
proposed decoupling method yields a smoother ids current.
Moreover, measurement noise also affects the dynamic motoring
response. The effect of such noise on ids behavior for a change in TL
is shown in Fig. 11. It is observed that, measurement noise affects
ids current more in the feedforward scheme than with the pro-
posed decoupling design. Here, the measurement noise is con-
sidered in the feedback speed signal. The noise parameters are
taken as: mean value of 0, variance 0.5 and initial seed as 50,000.
Remark 2. The objective of the proposed decoupling technique is on
the design of controller gains while minimizing the coupled terms
ω ie ds and ω ie qs effect on the system dynamics. As seen, this technique
yields higher Kpd, Kid, while lesser values for Kpq, Kiq are obtained.
These gains corroborate the result in Section 3. The current controller
sensitivity expression in Eqs. (11) and (12) shows that higher pro-
portional gains may reduce the perturbation in respective currents.
Since the impact of coupled dynamics is more on ids current, the
corresponding controller gains is obtained as higher than that with the
iqs. Therefore, when TL is changed, due to high bandwidth control for
ids, less perturbation occurs in the corresponding current.
6.2. Experimental results
The developments are next validated on an experimental bench
having KIRLOSKAR make 2.2 kW, 1410 rpm IM with a coupled dc
generator load. The experimental prototype is shown in Fig. 12. The
controller is implemented through dSPACE 1103 development board.
The sampling frequency for the control process is taken as 10 kHz. An
SPWM3 block is used to generate the sinusoidal pulse width mod-
ulation (PWM) pulses. The obtained PWM pulses are amplified from
5 to 15 volts using optocoupler 6N137 and CD4504 ICs corresponding
to driver circuit (SKYPER 32 R) requirement of SEMIKRON make three
phase rectifier- inverter stack. The rectifier circuit consists of an
SKD160/18 diode bridge and two dc link capacitor of 4700μF. The
switching frequency of the IGBT (SKM75GB12T4) based inverter is
taken as 5 kHz. Three LA 25-NP sensors are used to feedback the stator
currents to dSPACE ADCs. An infrared sensor is placed nearby an 18
slotted disk to sense the motor speed. The motor parameters are the
same as the one used for simulation purpose (Table 1).
Since inner-loop gains primarily affect the coupling between ids and
iqs, therefore, first, the effect of load variation is tested with the pro-
posed decoupling speed-loop gains and inner-loop gains in [19,2].
When the motor speed reaches to applied reference speed (130 rad/s),
a step load torque of about 6.5 NÁ m is exerted. The corresponding
experimental result for ωr, ids and iqs are shown in Fig. 13(a)–(b). It is
observed that as TL is changed, a large overshoot of about 10 A occurs
in ids. Next, the feedforward compensation is implemented with the
inner-loop PI gains in [19]. For this, the IM dynamics behavior with a
change in TL is shown in Fig. 13(c). Further, same load variation is
Fig. 14. Experimental result for change in ωref in step ( → → )100 150 100 .
Fig. 15. Experimental result of current tracking performance: (a) For change in TL. (b) For change in ωref.
J.Kr. Jain et al. / ISA Transactions 70 (2017) 378–388 387](https://image.slidesharecdn.com/pi-controller-design-for-indirect-vector-controlled-inductio2017isa-transa-180807171749/85/PI-controller-design-for-indirect-vector-controlled-induction-motor-10-320.jpg)
![applied to the proposed decoupling gains as shown in Fig. 13(d). It is
seen that ids with the feedforward and proposed design shows a small
overshoot of about 6A (zoomed portion), which is much lesser than
the ids in Fig. 13(a)–(b). Such behavior confirms the simulation results
in Fig. 8. Here, ids response is almost similar in both the feedforward
and proposed decoupling. Hence, without additional arrangements (as
required in feedforward decoupling), similar decoupling performance
is achieved using the proposed method with the same regulating PI
controllers. The experimental result for outer speed-loop control is
shown in Fig. 14. It is seen that ωr tracks smoothly even at large step
change in ωref. The current tracking performance of iqs for step change
in TL (6.5 NÁ m) and ωref ( → → )100 150 100 is also shown in Fig. 15,
which shows smooth current tracking is achieved using proposed
design.
7. Conclusions
In this work, controller parameters (that are conventionally used
for regulation) are designed for minimizing coupling effect of the
multi-loop IVCIM system. The traditional approaches rely on addi-
tional circuitry or modified controller which induce complexity in
conventional IVC approach. The proposed method can improve the
torque response yet inheriting other features of the IVC scheme.
Moreover, the sensitivity of current controller gains are also de-
termined which shows larger gains may reduce coupling. However, it
may introduce oscillations or even instability. To avoid this, a design
procedure has been given where the coupling terms are treated as
disturbance in order to achieve decoupled performance. The benefits
of the proposed method are: (i) the same current controllers can be
used for decoupling (no additional controller or signal processing re-
quired), (ii) all the loops are designed simultaneously that embeds
interactions of the individual loops in a single step design and (iii) the
design method offers incorporating the additional design criterion,
such as, robustness with respect to structured uncertainties since the
design is based on Lyapunov analysis and solving LMI criterion.
Comparison of the proposed design with the feedforward one shows
that feedforward decoupling scheme, even though it requires addi-
tional circuitry or signal processing, can only produce similar decou-
pling performance. The simulation and experimental results verify
that the proposed decoupling scheme provides an alternative for de-
coupled performance than the conventional one, yet maintaining
regulating performance. Use of advanced modern control technique
although may hinder the proposed technique for immediate use in
industries, but the authors hope that the same may be adopted over
time. The scope of future study can address the coupling minimization
while considering parameter variations that affects the IVCIM perfor-
mance considerably.
Acknowledgment
This work is supported by Department of Science and Tech-
nology, India, under the grant number DST/INT/POL/P-10/2014.
References
[1] Arun Dominic D, Chelliah TRaj. Analysis of field-oriented controlled induction
motor drives under sensor faults and an overview of sensorless schemes. ISA
Trans 2014;53(5):1680–94.
[2] Holmes DG, McGrath BP, Parker SG. Current regulation strategies for vector-
controlled induction motor drives. IEEE Trans Ind Electron 2012;59(10):3680–9.
[3] Amézquita-Brooks L, Licéaga-Castro J, Licéaga-Castro E. Speed and position
controllers using indirect field-oriented control:a classical control approach.
IEEE Trans Ind Electron 2014;61(4):1928–43.
[4] Bounar N, Boulkroune A, Boudjema F. Fuzzy adaptive controller for a DFI-
motor. in: Complex System Modelling and Control Through Intelligent Soft
Computations. Springer; 2015. p. 87–110.
[5] Bounar N, Boulkroune A, Boudjema F. Adaptive fuzzy control of doubly-fed
induction machine. J Control Eng Appl Inf 2014;16(2):98–110.
[6] Bounar N, Boulkroune A, Boudjema F, M'Saad M, Farza M. Adaptive fuzzy
vector control for a doubly-fed induction motor. Neurocomputing
2015;151:756–69.
[7] Lima F, Kaiser W, da Silva IN, Oliveira Jr. AA. Speed neuro-fuzzy estimator
applied to sensorless induction motor control. IEEE Lat Am Trans 2012;10
(5):2065–73.
[8] Garcia C, Rodriguez J, Silva C, Rojas C, Zanchetta P, Abu-Rub H. Full predictive
cascaded speed and current control of an induction machine. IEEE Trans En-
ergy Convers 2016;31(3):1059–67.
[9] Amézquita-Brooks LA, Licéaga-Castro E, Licéaga-Castro J, Ugalde-Loo CE. Flux-
torque cross-coupling analysis of FOC schemes: novel perturbation rejection
characteristics. ISA Trans 2015;58:446–61.
[10] Jung J, Nam K. A dynamic decoupling control scheme for high-speed operation
of induction motors. IEEE Trans Ind Electron 1999;46(1):100–10.
[11] Briz F, Degner MW, Lorenz RD. Analysis and design of current regulators using
complex vectors. IEEE Trans Ind Appl 2000;36(3):817–25.
[12] Sangwongwanich S, Suwankawin S. A speed-sensorless IM drive with mod-
ified decoupling control. in: Proceedings of the power conversion conference –
Nagaoka 1997. vol. 1; 1997. p. 85–90.
[13] Jung J, Lim S, Nam K. Pi type decoupling control scheme for high speed op-
eration of induction motors. in: IEEE power electronics specialists' conference
(PESC). vol. 2; 1997. pp. 1082–1085.
[14] Harnefors L, -Peter Nee H. Model-based current control of ac machines using
the internal model control method. IEEE Trans Ind Appl 1998;34(1):133–41.
[15] -Jeng Lin F, -Jong Wai R, -Hong Lin C, -Chung Liu D. Decoupled stator-flux-
oriented induction motor drive with fuzzy neural network uncertainty ob-
server. IEEE Trans Ind Electron 2000;47(2):356–67.
[16] Suwankawin S, Sangwongwanich S. A speed-sensorless IM drive with de-
coupling control and stability analysis of speed estimation. IEEE Trans Ind
Electron 2002;49(2):444–55.
[17] Bahrani B, Kenzelmann S, Rufer A. Multivariable-PI-based current control of
voltage source converters with superior axis decoupling capability. IEEE Trans
Ind Electron 2011;58(7):3016–26.
[18] Boussak M, Jarray K. A high-performance sensorless indirect stator flux or-
ientation control of induction motor drive. IEEE Trans Ind Electron 2006;53
(1):41–9.
[19] Comanescu M, Xu L, Batzel TD. Decoupled current control of sensorless in-
duction-motor drives by integral sliding mode. IEEE Trans Ind Electron
2008;55(11):3836–45.
[20] Kommuri SK, Rath JJ, Veluvolu KC, Defoort M, Soh YC. Decoupled current
control and sensor fault detection with second-order sliding mode for in-
duction motor. Control Theory Appl IET 2015;9(4):608–17.
[21] Kumar N, Chelliah T, Srivastava S. Adaptive control schemes for improving
dynamic performance of efficiency-optimized induction motor drives. ISA
Trans 2015;57:301–10.
[22] Abdelsalam AK, Masoud MI, Hamad MS, Williams BW. Modified indirect
vector control technique for current-source induction motor drive. IEEE Trans
Ind Appl 2012;48(6):2433–42.
[23] Lee J, Hong J, Nam K, Ortega R, Praly L, Astolfi A. Sensorless control of surface-
mount permanent-magnet synchronous motors based on a nonlinear ob-
server. IEEE Trans Power Electron 2010;25(2):290–7.
[24] Amézquita-Brooks LA, Licéaga-Castro J, Licéaga-Castro E, Ugalde-Loo CE. In-
duction motor control: multivariable analysis and effective decentralized
control of stator currents for high-performance applications. IEEE Trans Ind
Electron 2015;62(11):6818–32.
[25] Ho WK, Gan OP, Tay EB, Ang EL. Performance and gain and phase margins of
well-known PID tuning formulas. IEEE Trans Control Syst Technol 1996;4
(4):473–7.
[26] -Yan Cao Y, Lam J, -Xiam Sun Y. Static output feedback stabilization: an ILMI
approach. Automatica 1998;34(12):1641–5.
[27] Bevrani H, Hiyama T. Multiobjective pi/pid control design using an iterative
linear matrix inequalities algorithm. Int J Control Autom Syst 2007;5(2):117–27.
[28] Bose BK. Power Electronics and AC Drives.Englewood Cliffs, NJ: Prentice-Hall;
1987.
[29] Krause PC, Wasynczuk O, Sudhoff SD. Analysis of Electric Machinery and Drive
Systems.India: Wiley; 2004.
[30] Krishnan R, Doran FC. Study of parameter sensitivity in high performance in-
verter-fed induction motor drive systems. IEEE Trans Ind Appl 1987;4:623–35.
[31] Lorenz RD, Lawson DB. Performance of feedforward current regulators for field-
oriented induction machine controllers. IEEE Trans Ind Appl 1987;4:597–602.
[32] Maiti S, Chakraborty C. Model reference adaptive controller-based rotor re-
sistance and speed estimation techniques for vector controlled induction motor
drive utilizing reactive power. IEEE Trans Ind Electron 2008;55(2):594–601.
[33] Rafa S, Larabi A, Barazane L, Manceur M, Essounbouli N, Hamzaoui A. Im-
plementation of a new fuzzy vector control of induction motor. ISA Trans
2014;53(3):744–54.
[34] Gahinet P, Nemirovskii A, Laub AJ, Chilali M. The LMI control toolbox.Natick
Mass: The Math-Works Inc; 1995.
[35] Yepes AG, Vidal A, Malvar J, López O, Doval-Gandoy J. Tuning method aimed at
optimized settling time and overshoot for synchronous proportional-integral
current control in electric machines. IEEE Trans Power Electron 2014;29
(6):3041–54.
J.Kr. Jain et al. / ISA Transactions 70 (2017) 378–388388](https://image.slidesharecdn.com/pi-controller-design-for-indirect-vector-controlled-inductio2017isa-transa-180807171749/85/PI-controller-design-for-indirect-vector-controlled-induction-motor-11-320.jpg)

This research article presents a new method for designing proportional-integral (PI) controllers for indirect vector controlled induction motors to minimize stator current coupling without requiring additional decouplers. Utilizing an iterative linear matrix inequality approach, the proposed control method is shown to be effective in achieving smoother torque response compared to conventional feedforward decoupling schemes. The paper includes simulation and experimental results to validate the performance of the proposed controller design.