Downloaded 16 times

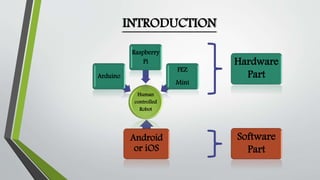
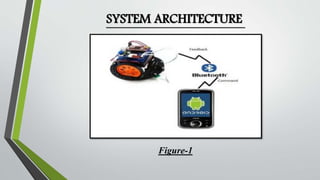
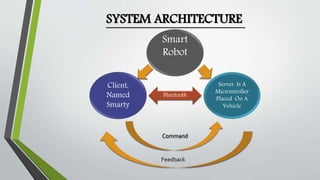
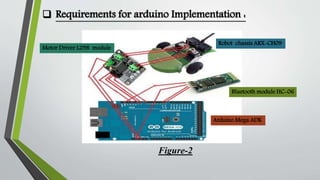
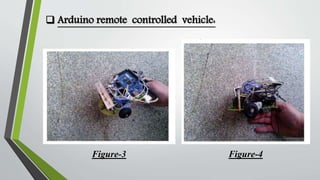
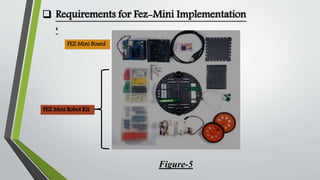

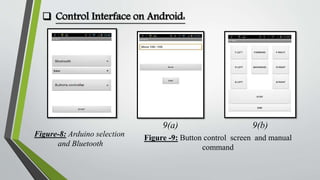
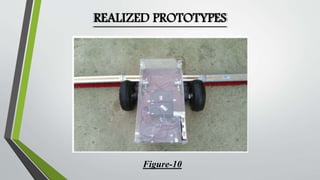

This document describes the development of a smart robot to clean tennis courts. The system uses an Arduino or FEZ Mini microcontroller on the robot controlled by an Android application over Bluetooth. The robot is designed to collect tennis balls and clean court lines. The system architecture connects the Android client to the microcontroller server on the robot. Hardware implementations use the Arduino and FEZ Mini with motors, sensors and other components. The Android app allows selecting the microcontroller and controlling robot movement and functions. Prototypes of the tennis court cleaning robot were successfully realized.