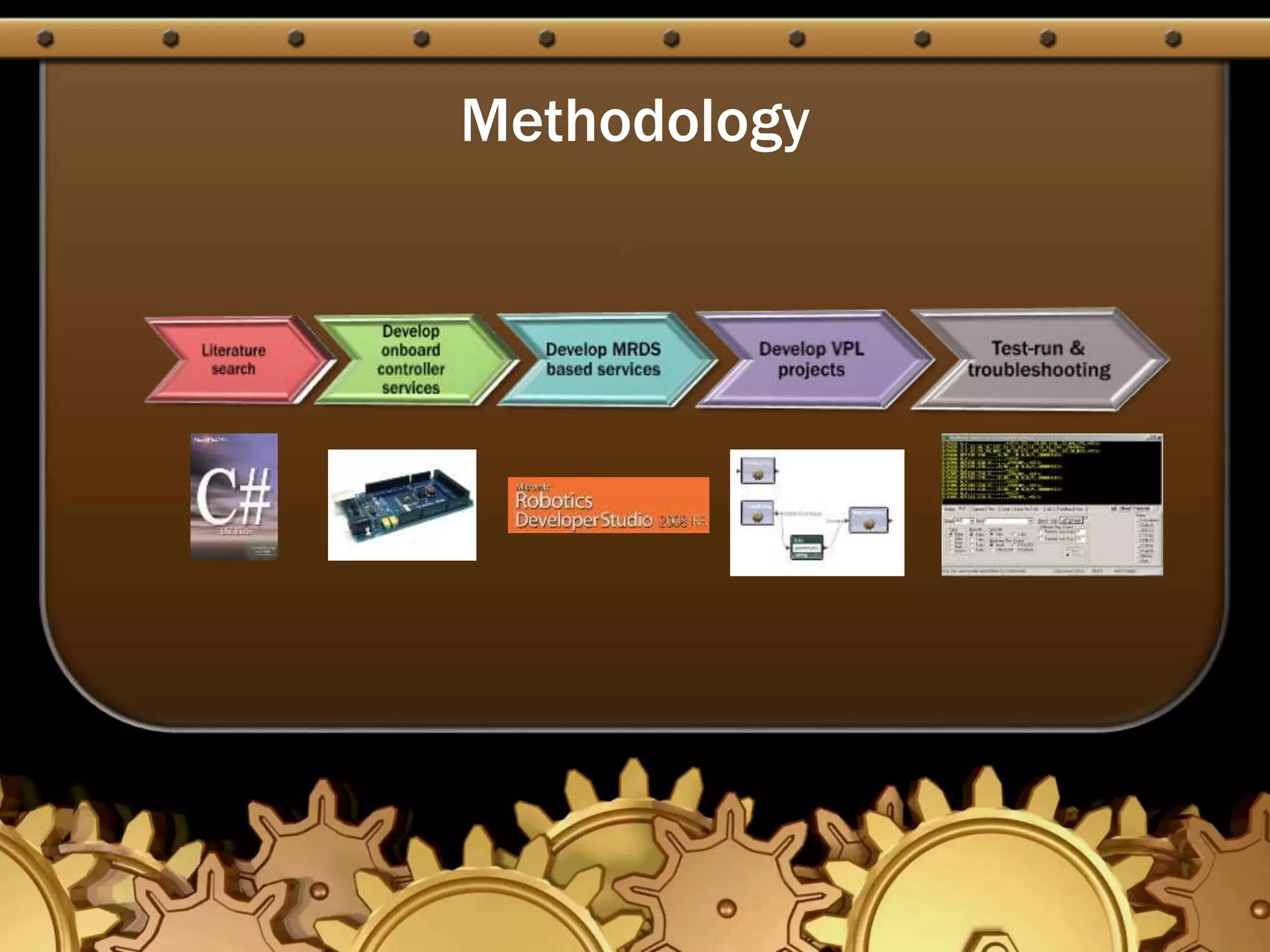
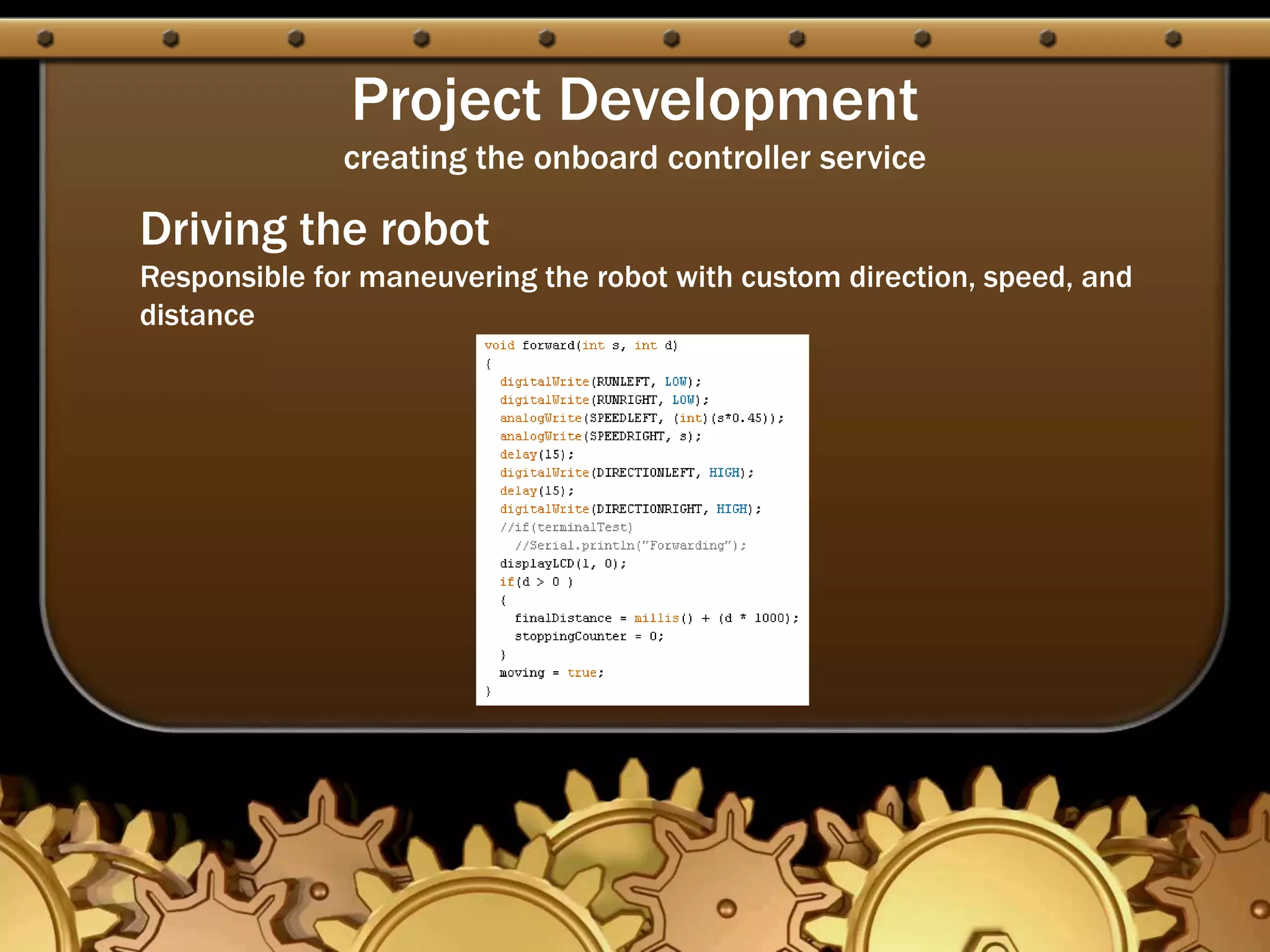
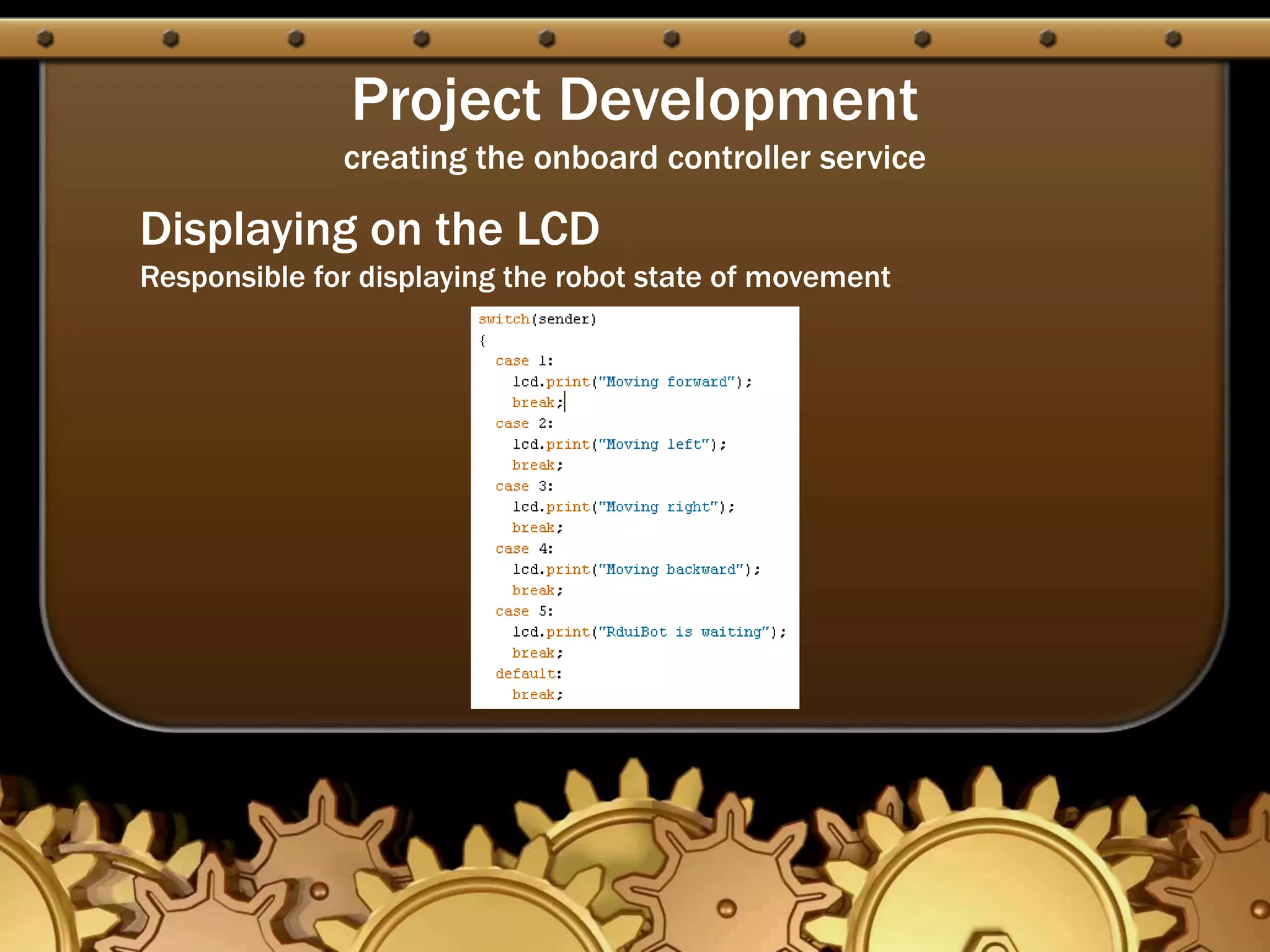
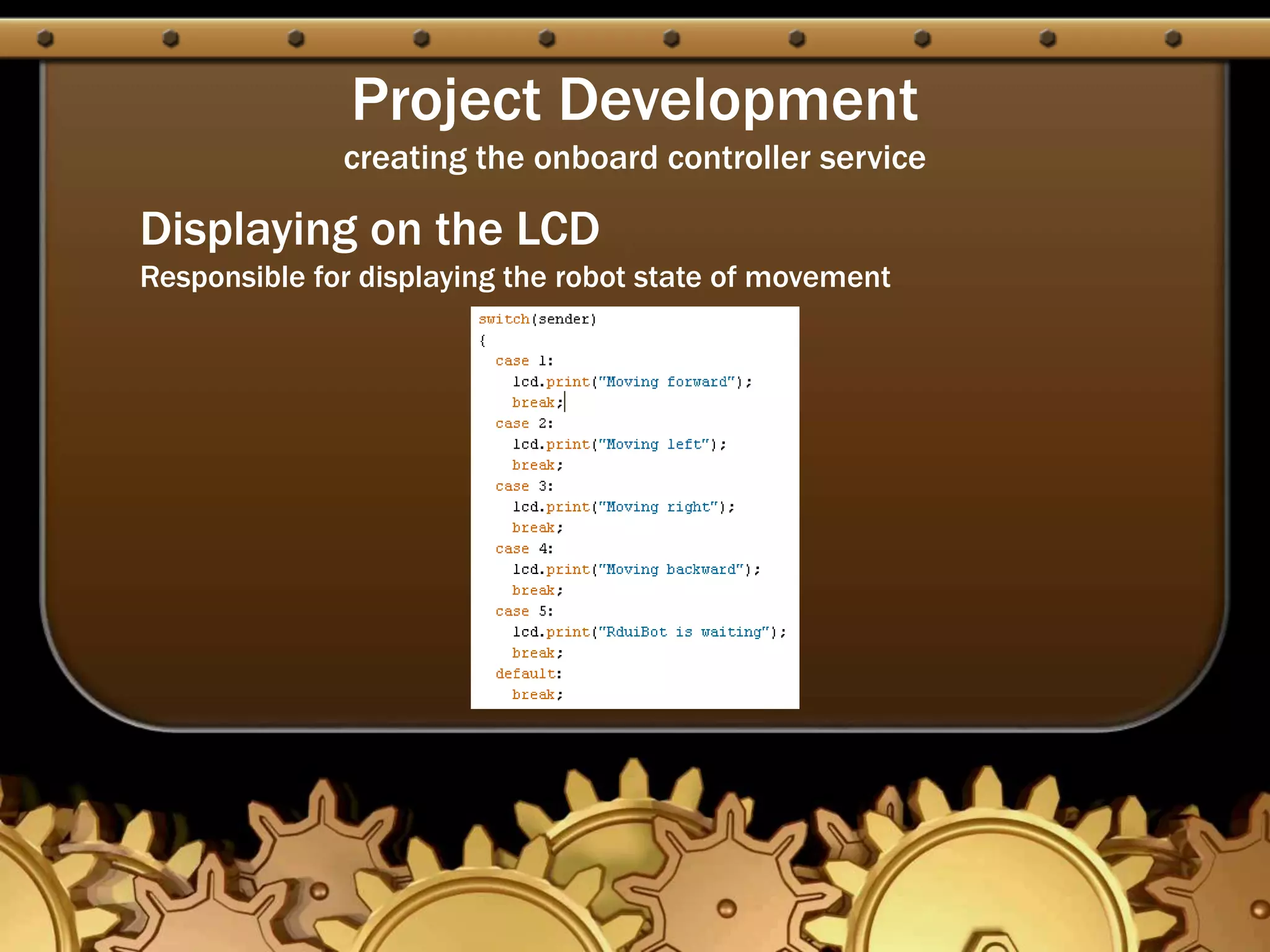
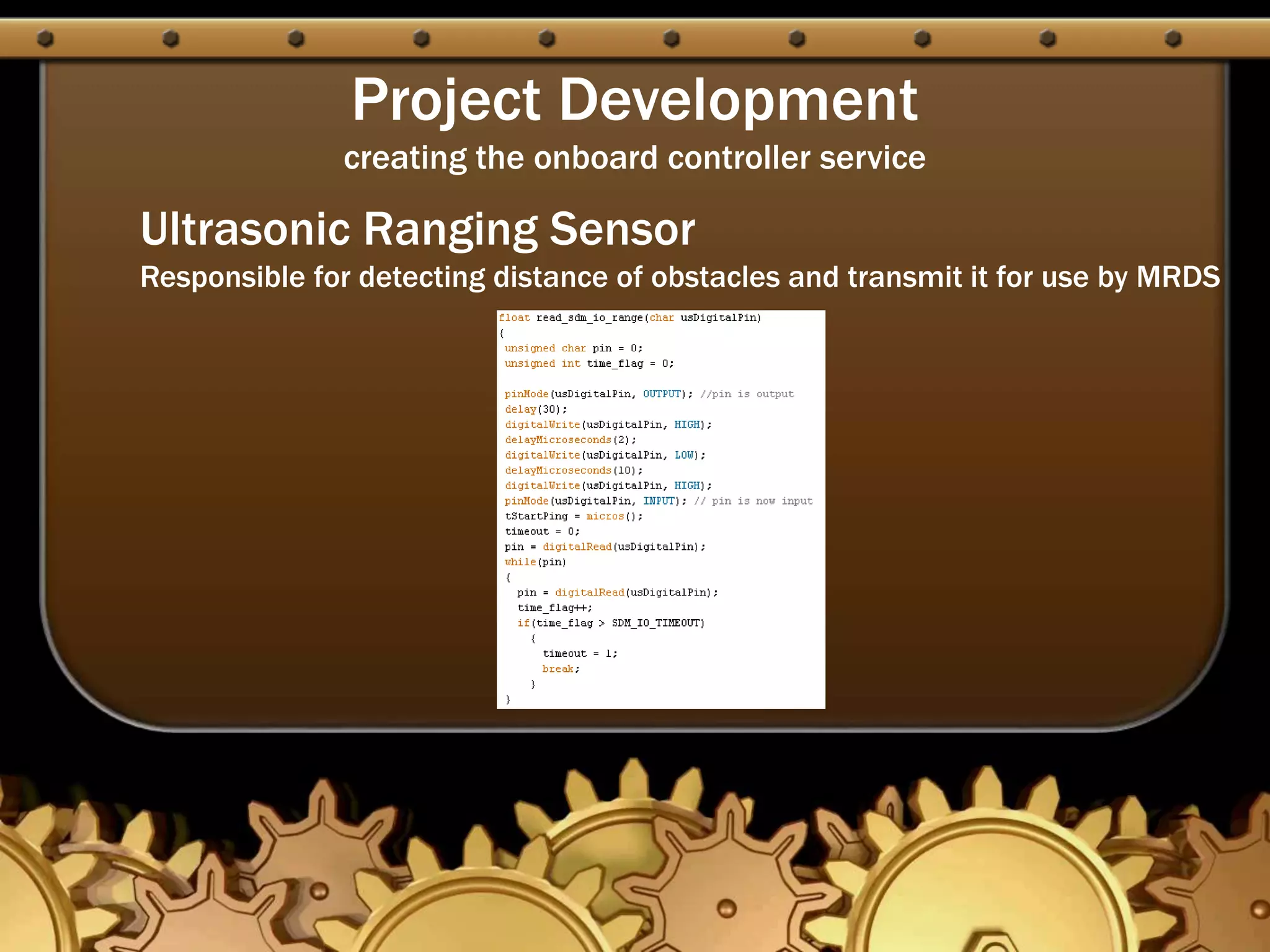
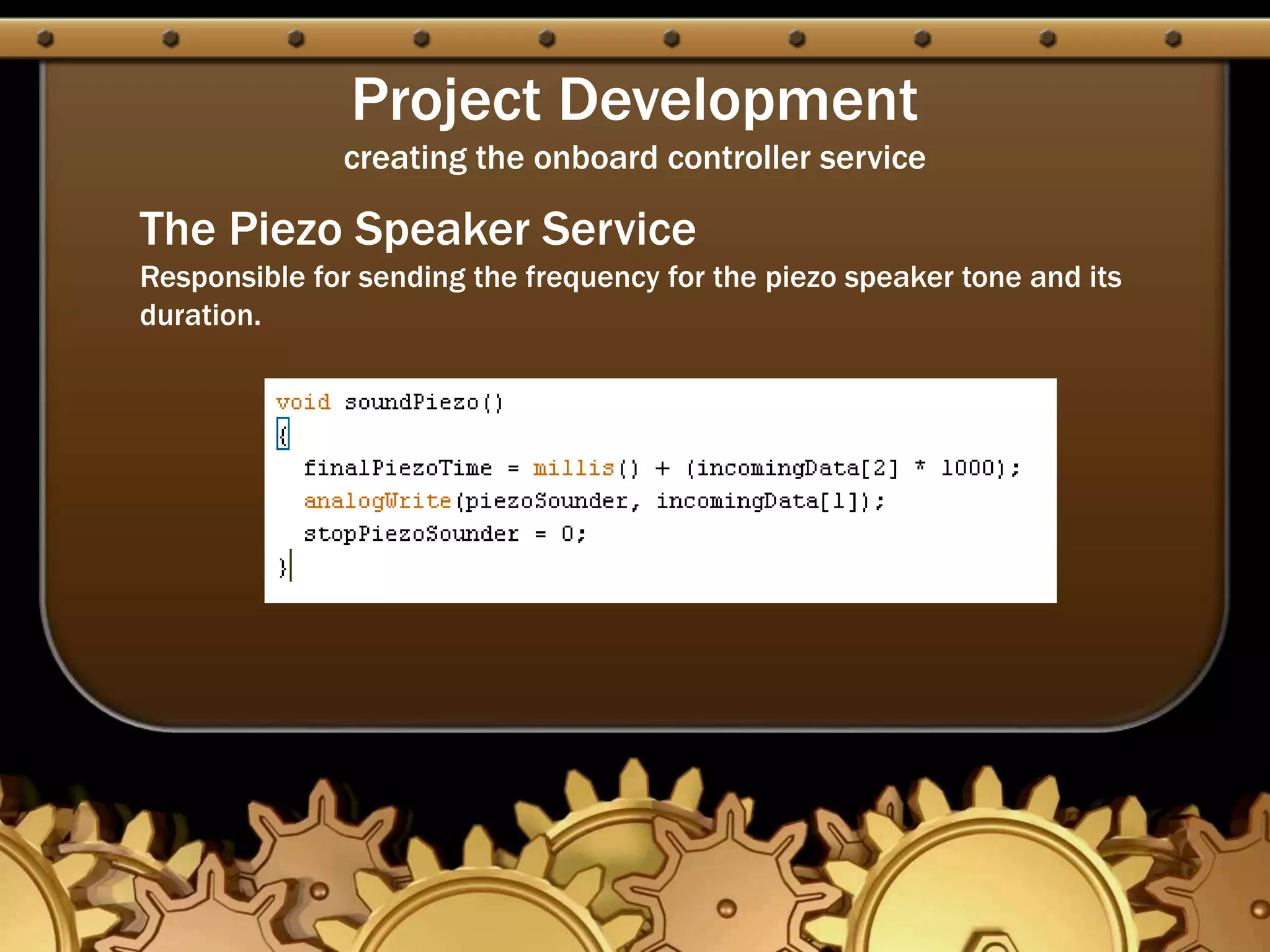
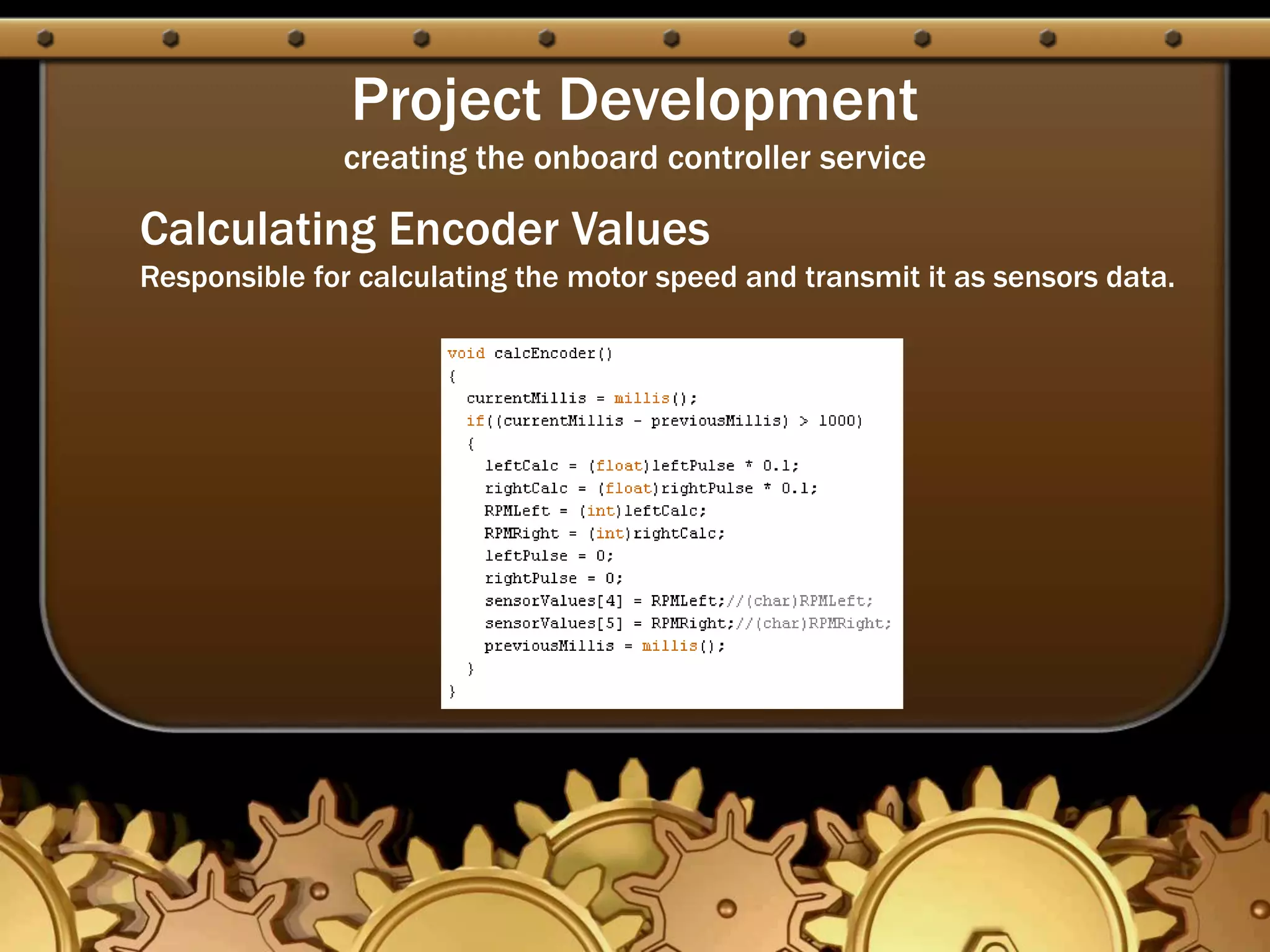
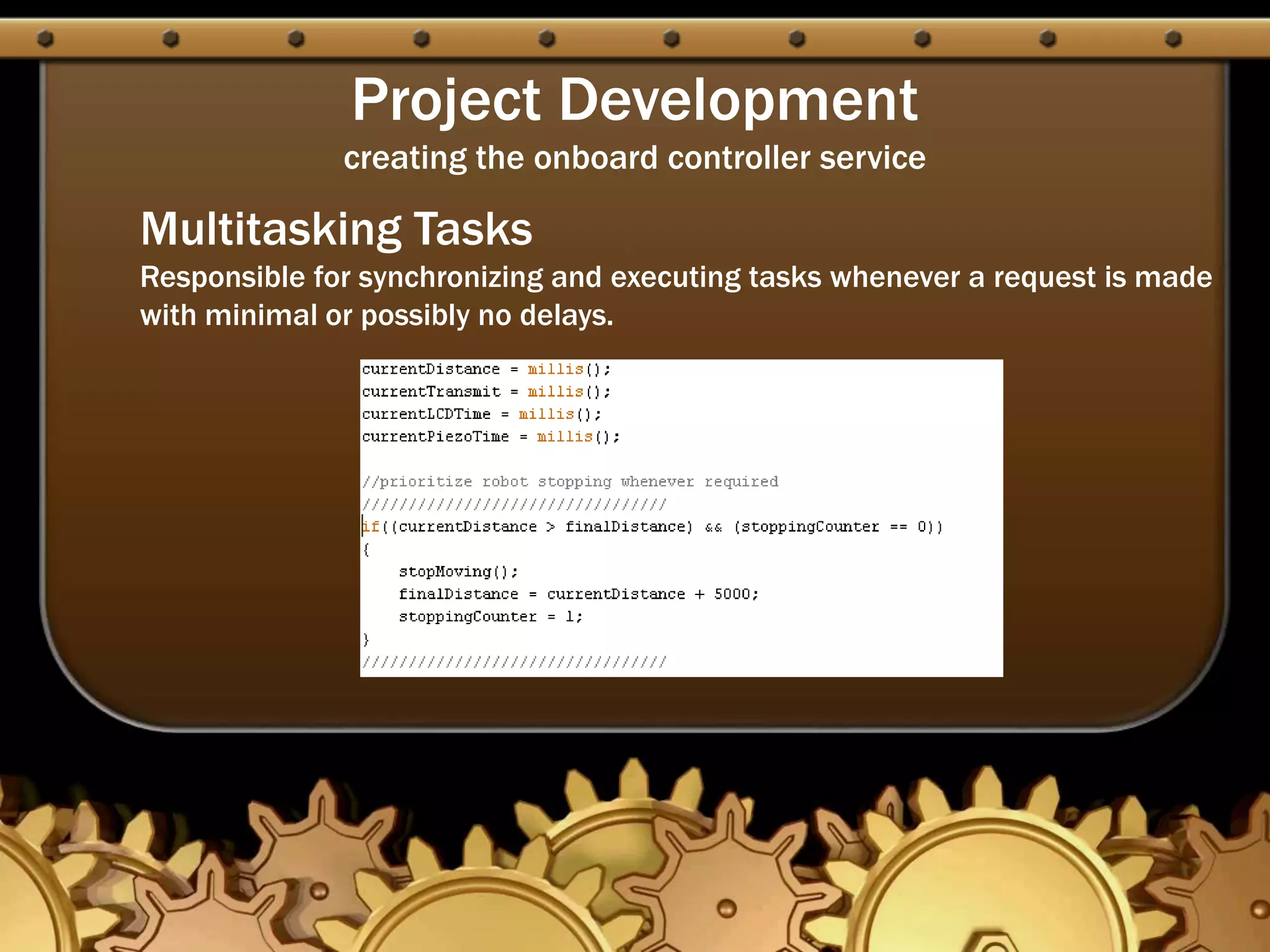
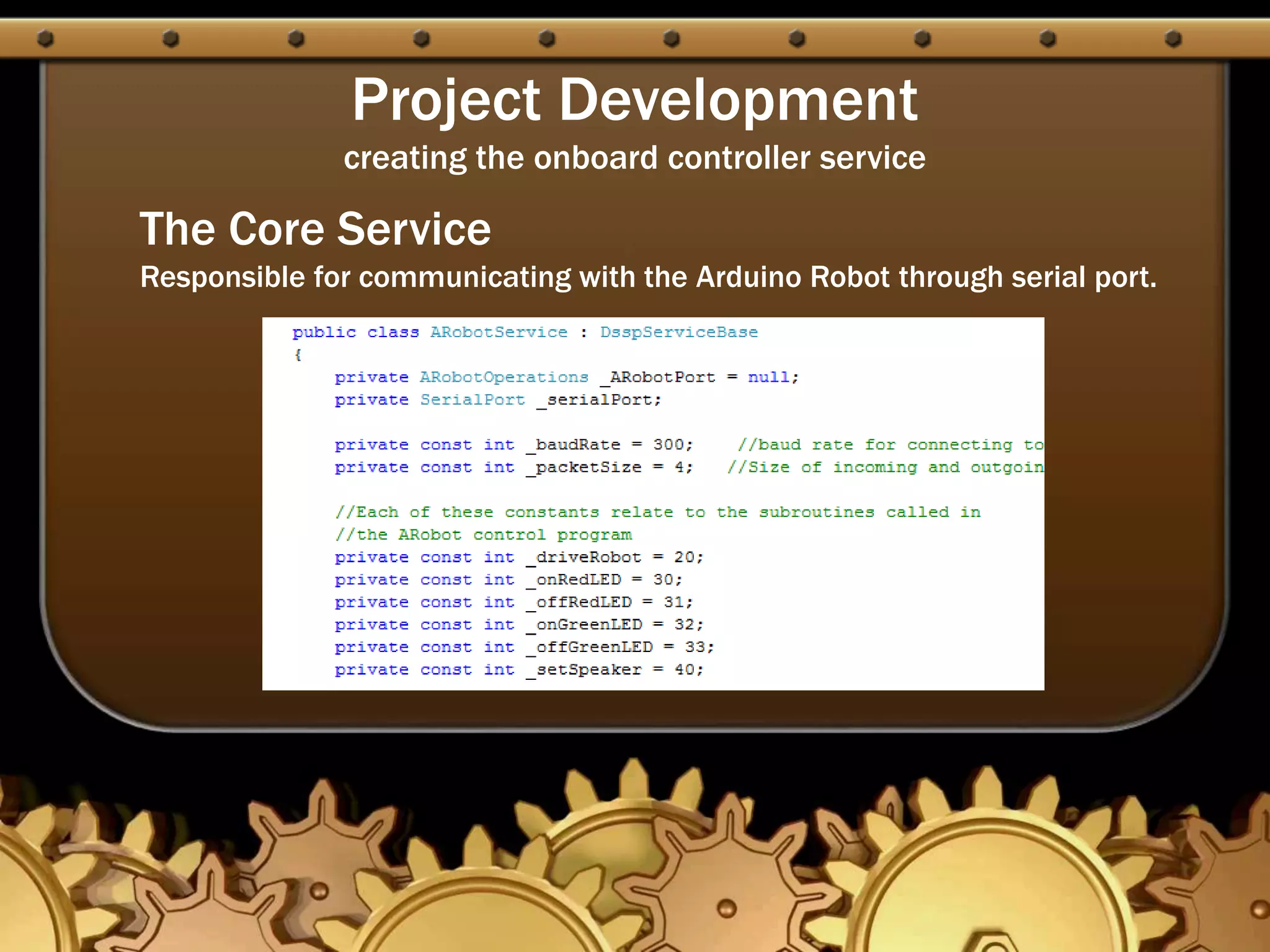
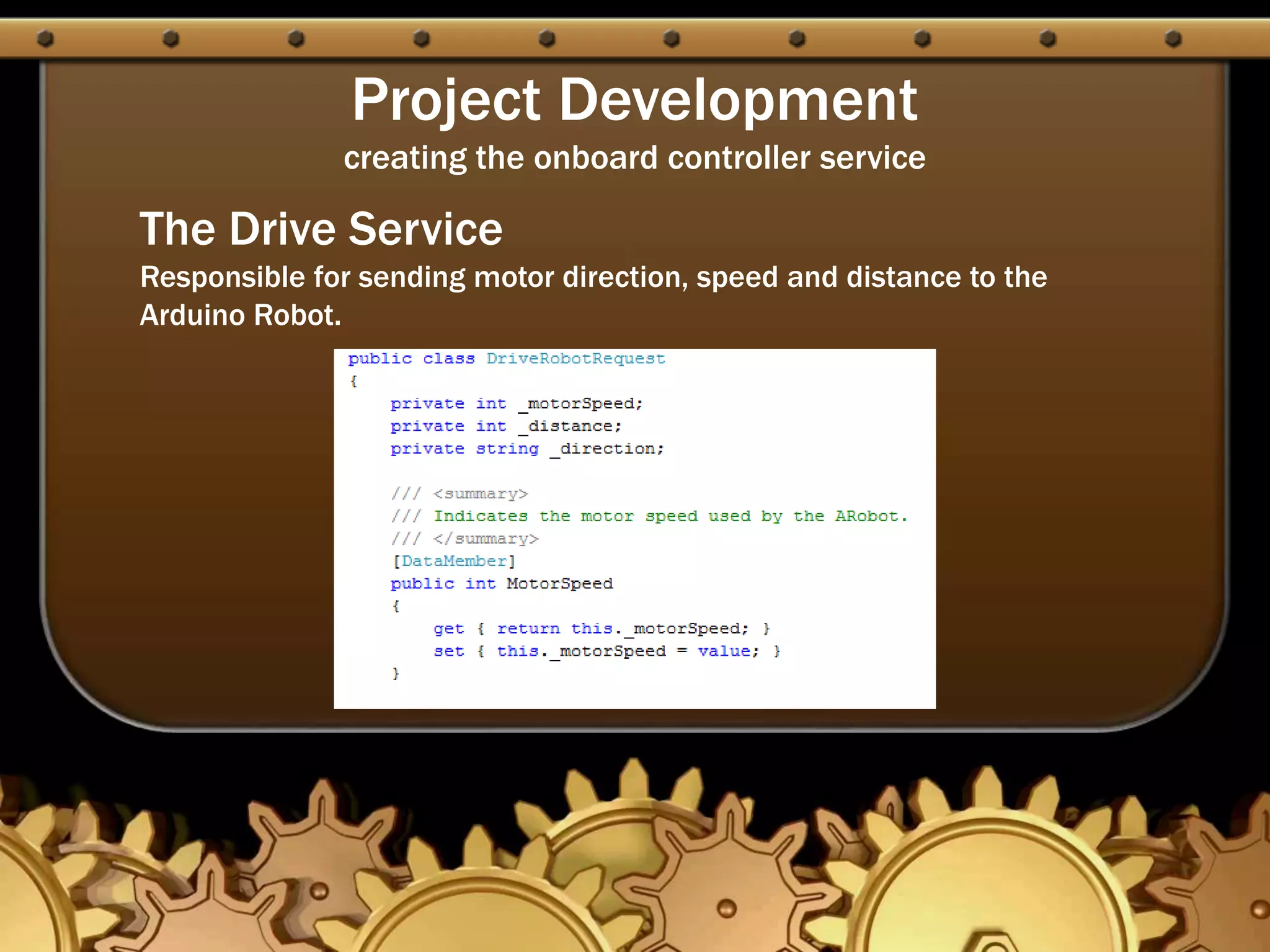
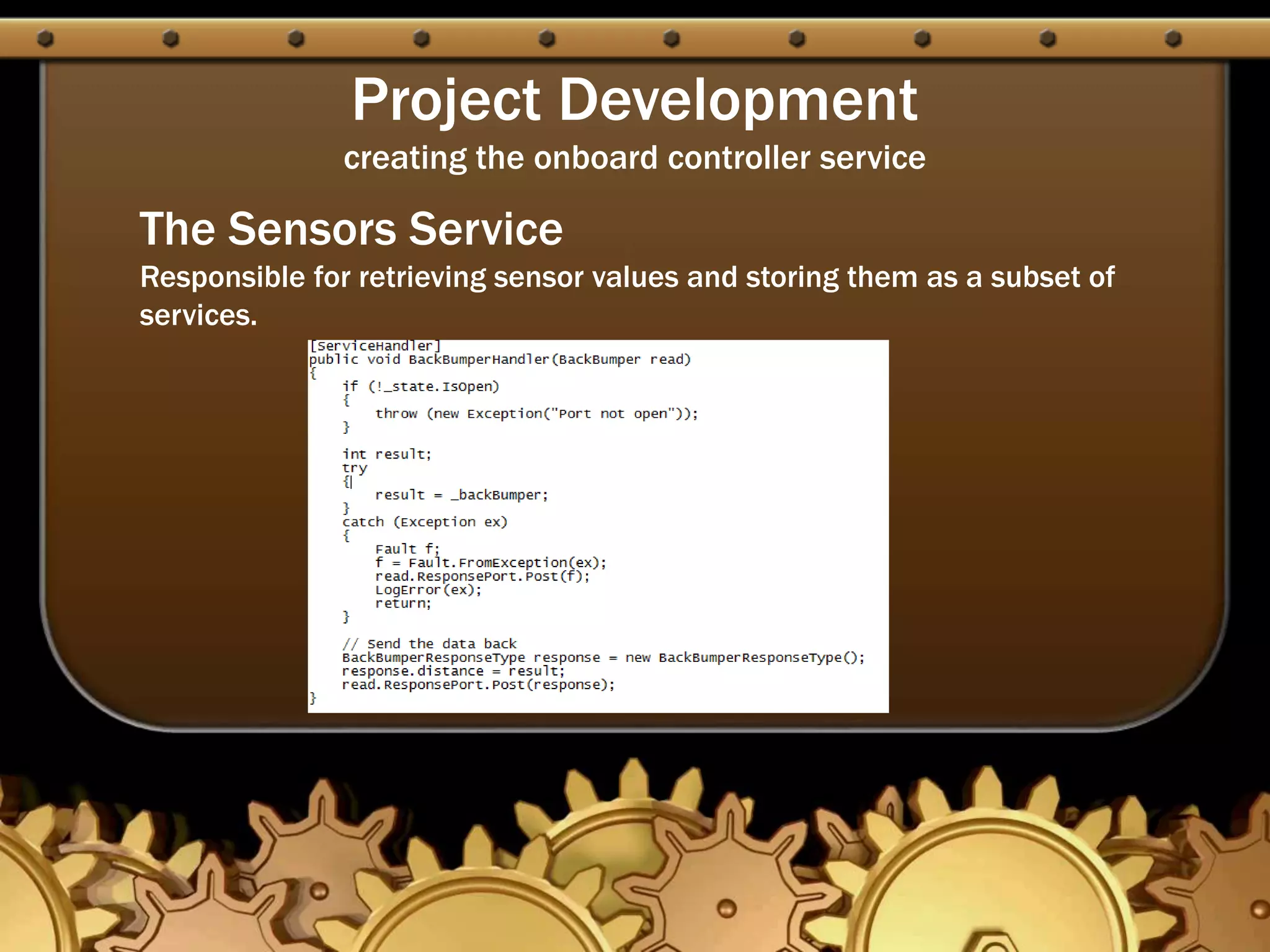
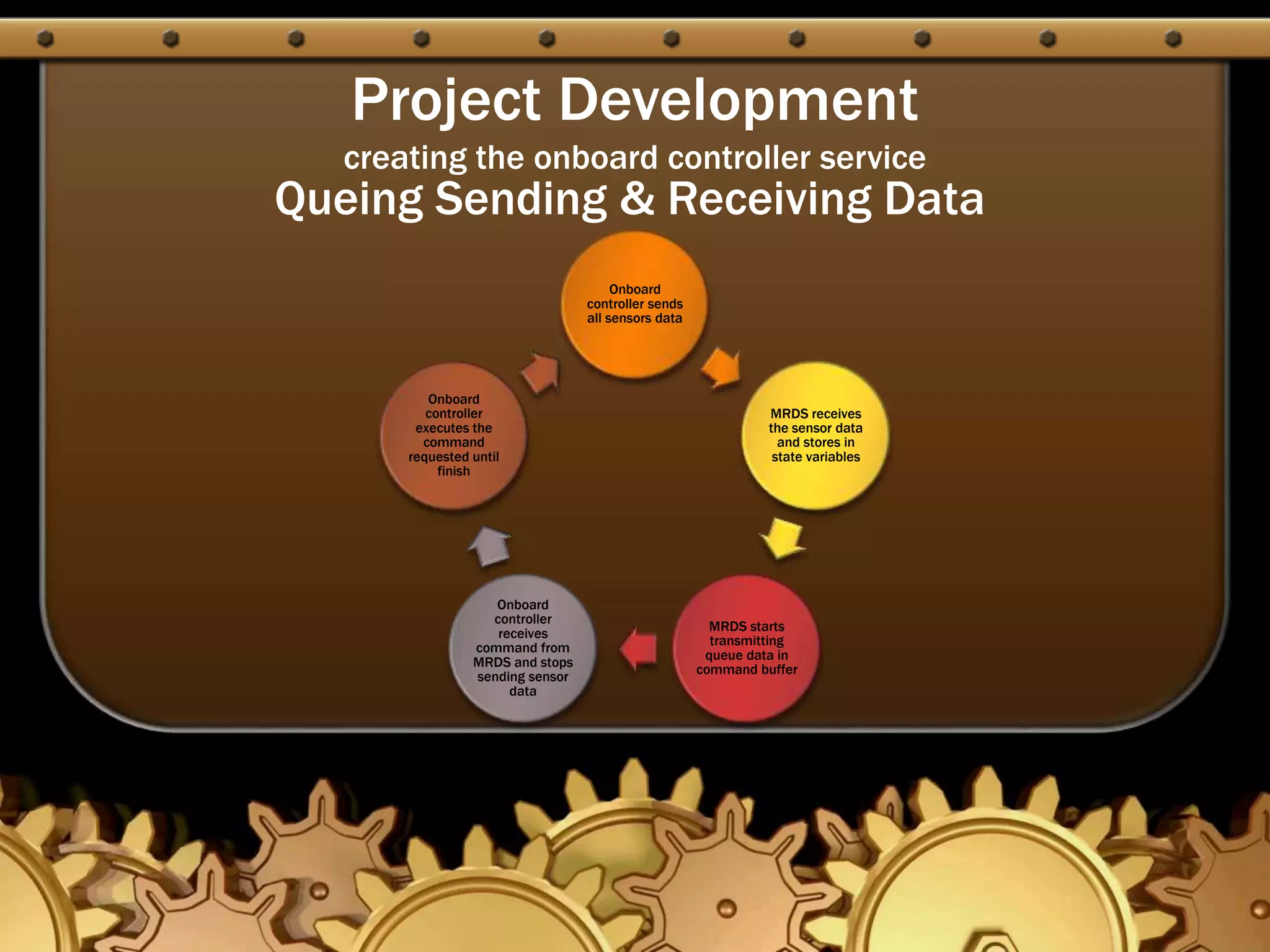
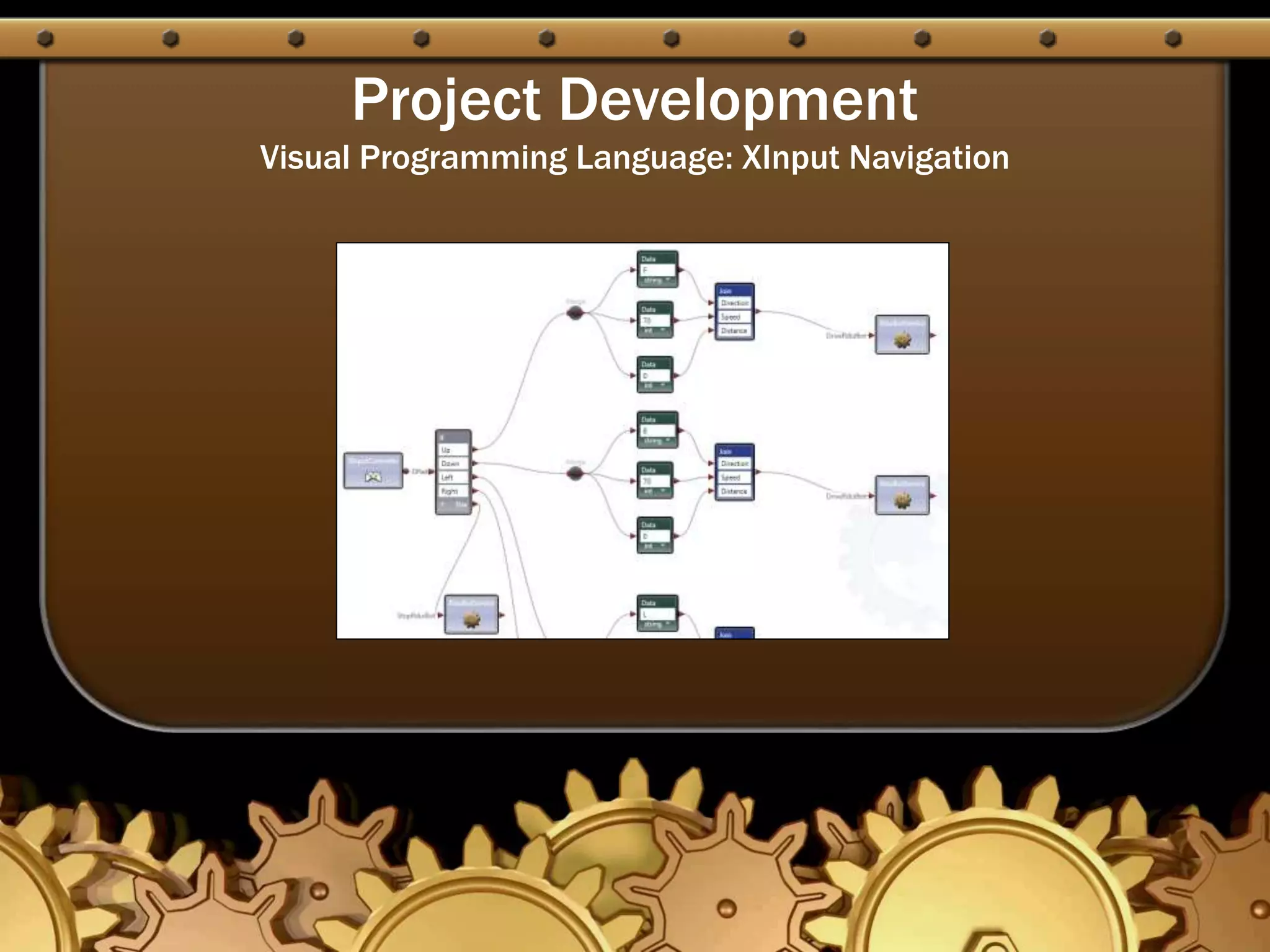
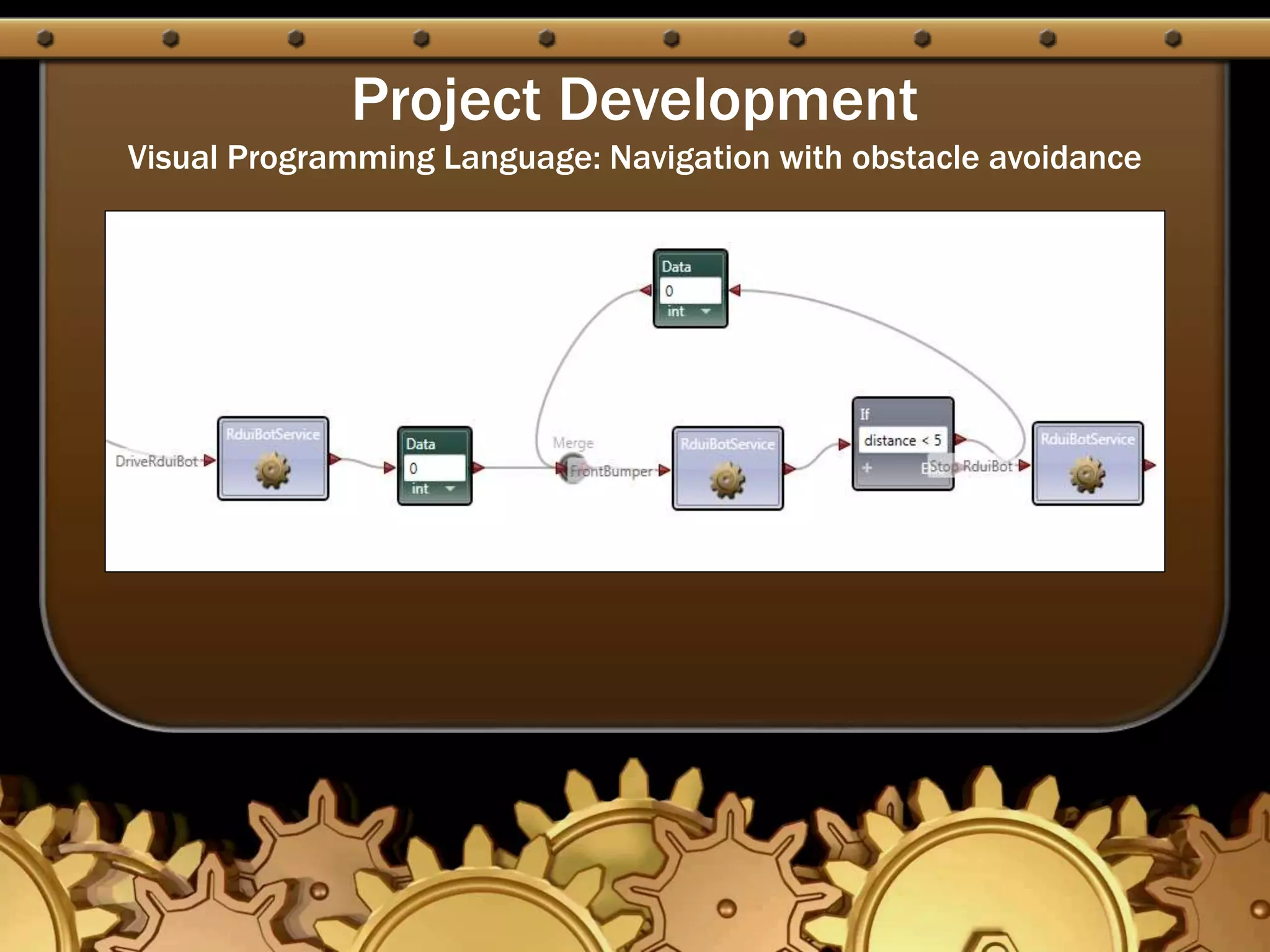
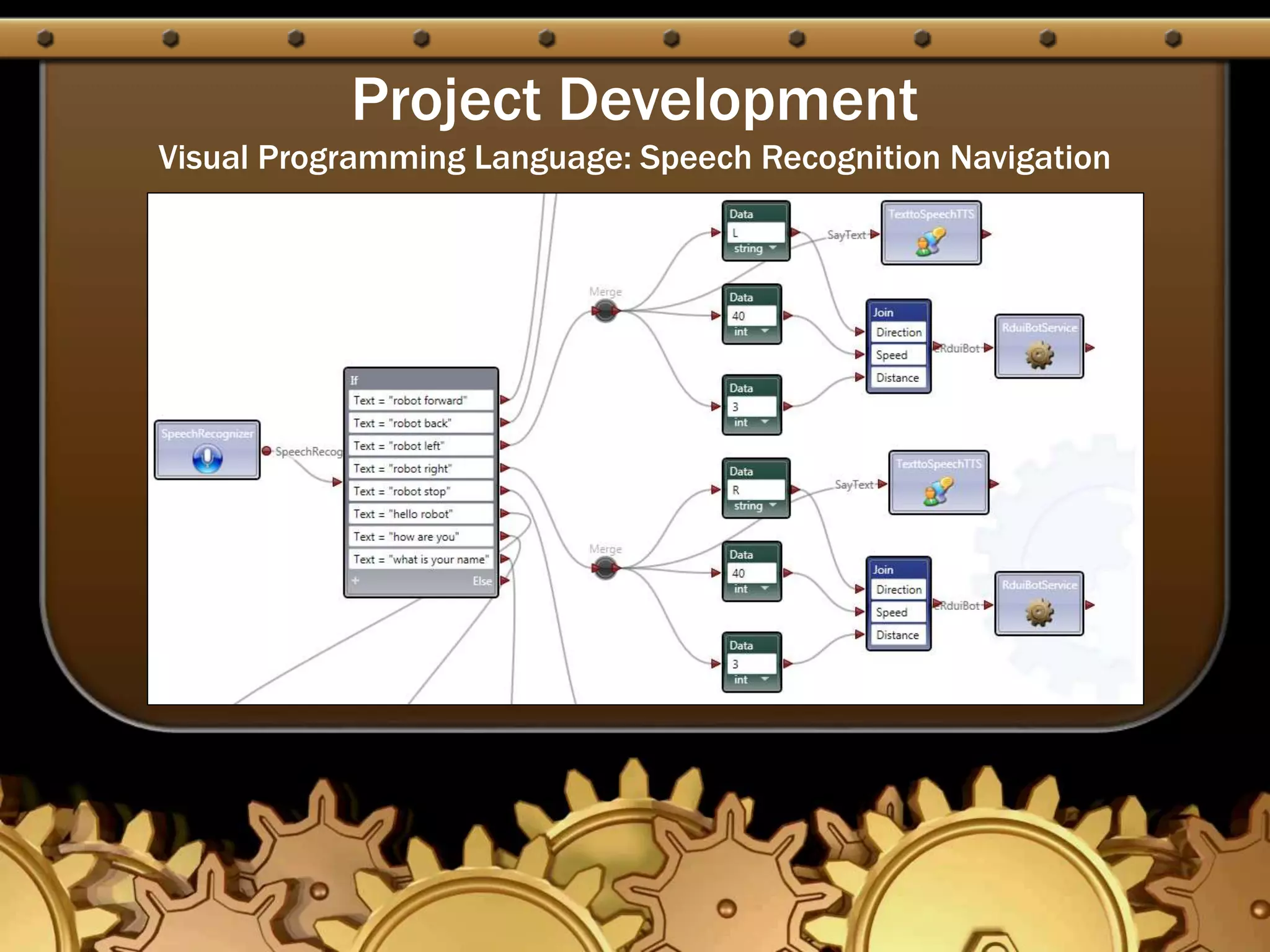
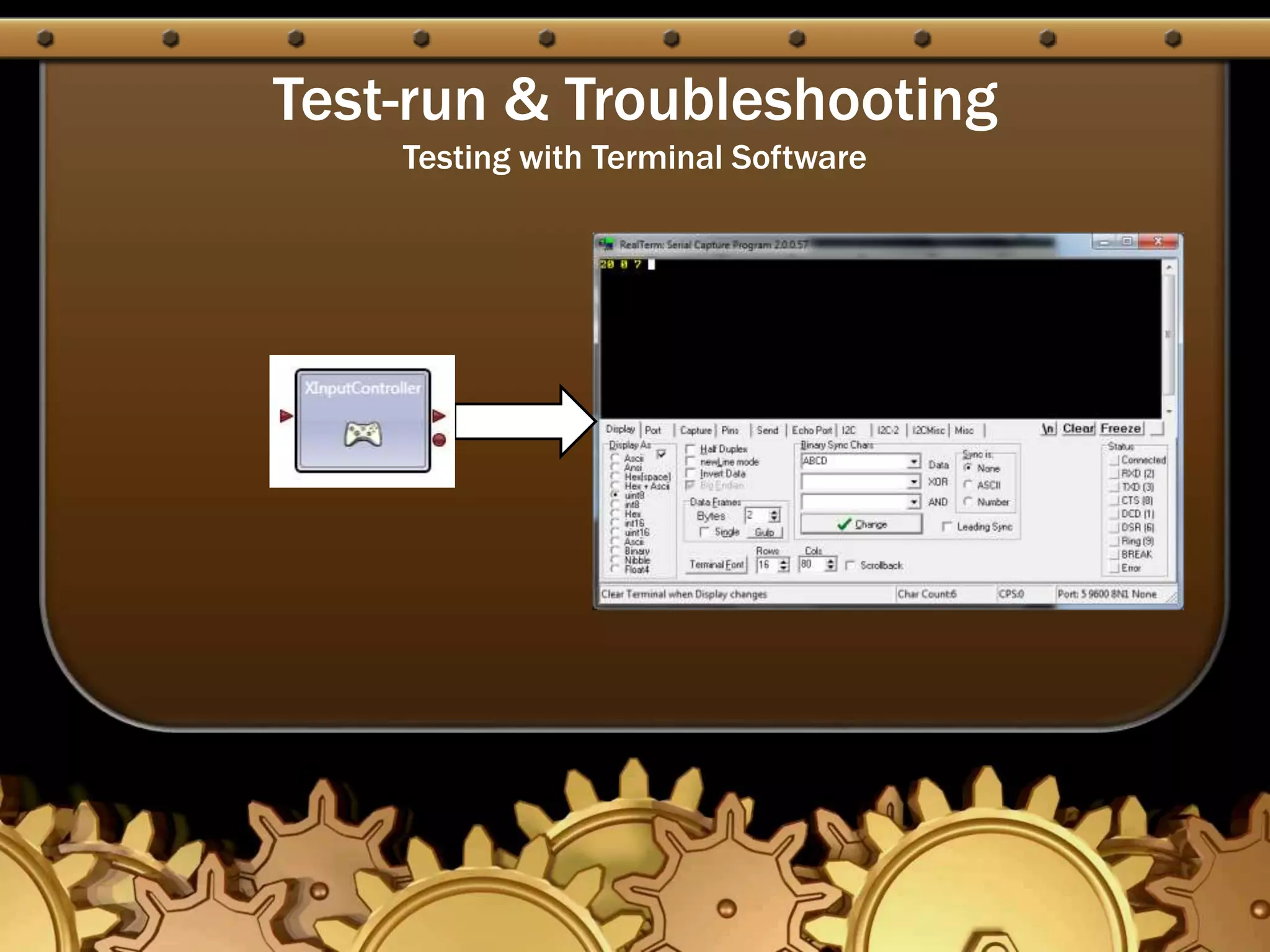
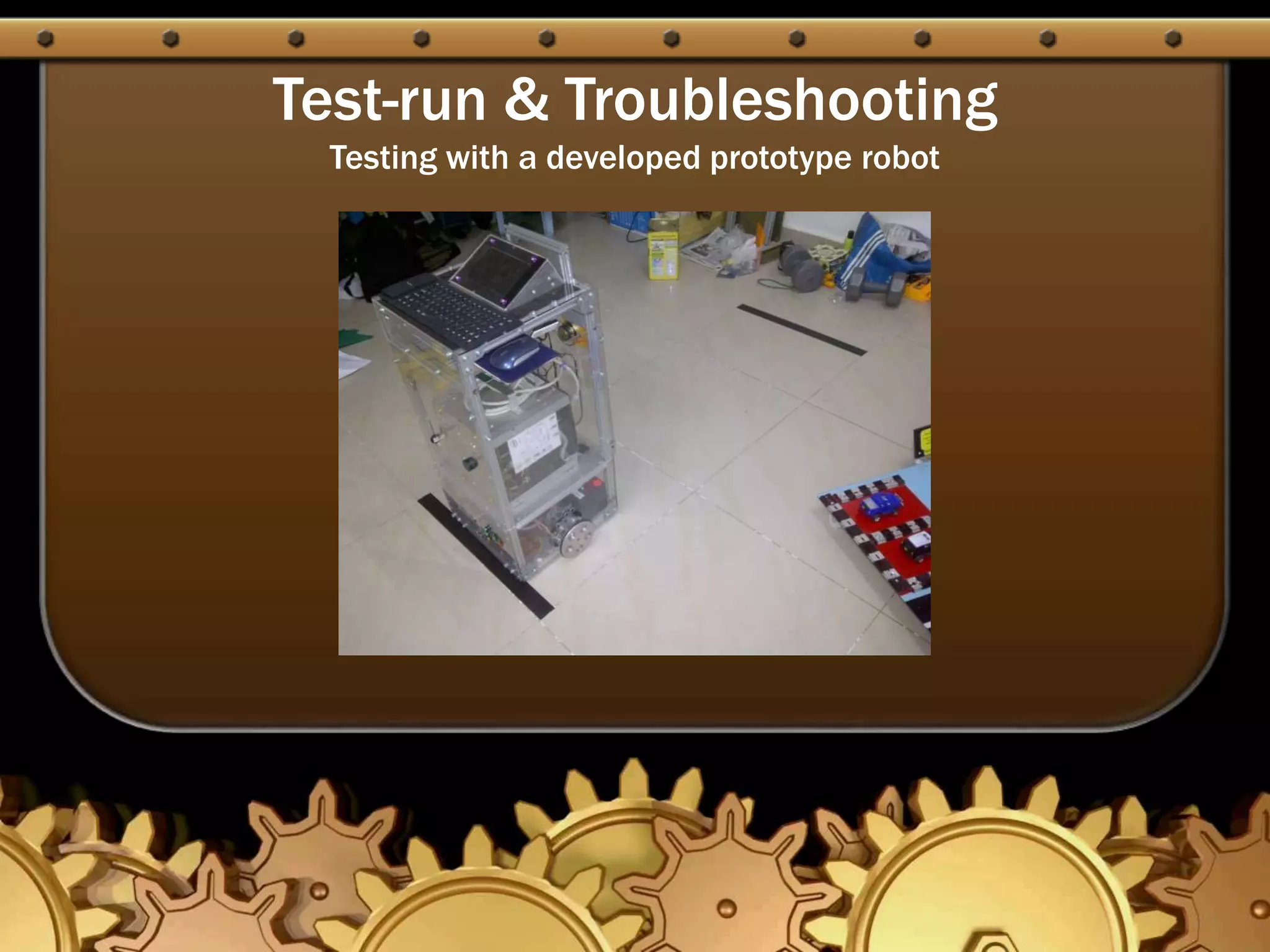
This document summarizes a final report on developing a software service component utilizing the Microsoft Robotics Developer Studio (MRDS). The objectives were to develop microcontroller-based sensor and actuator services for MRDS interfacing and demonstrate visual programming language (VPL) control of a mobile robot. The project scope involved creating MRDS sensor and actuator services for an unsupported mobile robot. The methodology described creating onboard controller services for driving, sensing, displaying and communicating with the robot. Visual programming was demonstrated for navigation, obstacle avoidance and speech recognition control. Testing and future work are discussed before concluding the project created an effective and prototyping platform for robot functionality limited only by imagination.